В.4 Мощность, затрачиваемая на поворот мобота.
Мощностью внешних сопротивлений при повороте называется мощность, затрачиваемая на поворот машины и деформацию грунта. Она состоит из мощностей: сопротивления прямолинейному движению; необходимой для преодоления момента сопротивления повороту относительно полюсов поворота; расходуемой на буксование и юз гусеничных цепей.
Мощность внешних сопротивлений выражается формулами (в кВт или л.с. соответственно):
 или
или  ( 57 )
( 57 )
В этих выражениях члены
 и
и 
определяют мощности внешних сопротивлений на забегающей и отстающей гусеничных цепях соответственно.
Мощность внешних сопротивлений не учитывает потери в трансмиссии и ходовой части.
Потребные силы тяги на гусеницах конкретного мобота зависят только от качества грунта (см. Уравнения (54)) и не зависят от типа механизма поворота, или закона изменения угловых скоростей по бортам. Поэтому влиять на мощность внешних сопротивлений повороту можно только за счёт выбора закона регулирования скоростей отстающего или забегающего борта, от чего меняется скорость центра масс мобота т.е. от типа механизма поворота.
На рис.16 представлено влияние способа регулирования скоростей гусениц разных бортов на затраты мощности на поворот в зависимости от радиуса.
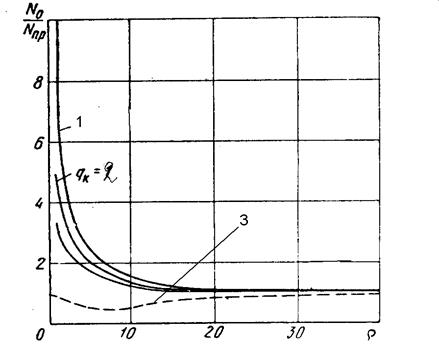
Рис.17. Относительная величина мощности внешних сопротивлений  в зависимости от радиуса поворота r (
в зависимости от радиуса поворота r (  ) на заданном грунте (f=0,08; mmax=0,9) для различных механизмов поворота.
) на заданном грунте (f=0,08; mmax=0,9) для различных механизмов поворота.
Как видно из графика мощность внешних сопротивлений значительно увеличивается при малых радиусах поворота и зависит от закона изменения скоростей гусениц.
Кривая 1 относится к случаю дифференциальной связи между бортами  ,
,  , где скорость центра масс остаётся постоянной (
, где скорость центра масс остаётся постоянной (  ) равной скорости прямолинейного движения.
) равной скорости прямолинейного движения.
Случай 2 типичен, когда отстающий борт затормаживается, а забегающий сохраняет скорость прямолинейного движения  , механизмы планетарного типа или тормоз. При этом средняя скорость машины падает.
, механизмы планетарного типа или тормоз. При этом средняя скорость машины падает.
Более сложный закон регулирования скоростей отстающего и забегающего бортов (кривая 3) позволяет обеспечить ещё более значительное снижение скорости центра мобота и мощности внешних сопротивлений на повороте.
При относительном радиусе поворота  тип закона изменения скоростей забегающего и отстающего бортов на мощность внешних сопротивлений практически не влияет.
тип закона изменения скоростей забегающего и отстающего бортов на мощность внешних сопротивлений практически не влияет.
Следует ещё раз напомнить, что вышеизложенные материалы распространяются не только на гусеничные шасси, но и на полноприводные шасси с колёсным движителем, имеющим базовый принцип поворота за счёт рассогласования угловой скорости приводов и наличии жёсткой кинематической связи между колёсами одного борта, т.е. угловые скорости всех колёс по забегающему борту равны  и по отстающему
и по отстающему  .
.
При условии индивидуального привода на каждое колесо шасси процесс взаимодействия колёс с основанием носит более сложный характер и зависит от ряда факторов, таких, как вид связи между колёсами, нагрузкой на колёса, угловой жёсткости колёс и т.д. и рассматривается в специальной литературе [ ],[ ].
Дата добавления: 2020-04-12; просмотров: 855;
Поиск по сайту
Узнать еще
- А.4 Общее уравнение движения мобота.
- Алканы. Поворотная изомерия, конформации
- Б.3 Определение диапазона трансмиссии и скорости движения мобота.
- Б.5 Пример тягового расчёта мобота.
- В.0 Поворот мобота на колесном ходу.
- В.1 Кинематика поворота гусеничного мобота.
- В.10. В12. В.13. Мощность переменного тока Треугольник мощностей, его практическое значение. Активная, реактивная, полная мощность, Коэф-ент мощности, его определение.
- В.2 Момент сопротивления повороту и сила тяги на гусеницах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
