Логическая организация файла
В общем случае данные, содержащиеся в файле, имеют некую логическую структуру. Эта структура является базой при разработке программы, предназначенной для обработки этих данных. Например, чтобы текст мог быть правильно выведен на экран, программа должна иметь возможность выделить отдельные слова, строки, абзацы и т. д. Признаками, отделяющими один структурный элемент от другого, могут служить определенные кодовые последовательности или просто известные программе значения смещений этих структурных элементов относительно начала файла. Поддержание структуры данных может быть либо целиком возложено на приложение, либо в той или иной степени эту работу может взять на себя файловая система.
В первом случае, когда все действия, связанные со структуризацией и интерпретацией содержимого файла целиком относятся к ведению приложения, файл представляется ФС неструктурированной последовательностью данных. Приложение формулирует запросы к файловой системе на ввод-вывод, используя общие для всех приложений системные средства, например, указывая смещение от начала файла и количество байт, которые необходимо считать или записать. Поступивший к приложению поток байт интерпретируется в соответствии с заложенной в программе логикой. Например, компилятор генерирует, а редактор связей воспринимает вполне определенный формат объектного модуля программы. При этом формат файла, в котором хранится объектный модуль, известен только этим программам. Подчеркнем, что интерпретация данных никак не связана с действительным способом их хранения в файловой системе.
Модель файла, в соответствии с которой содержимое файла представляется неструктурированной последовательностью (потоком) байт, стала популярной вместе с ОС UNIX, а теперь она широко используется в большинстве современных ОС, в том числе в MS-DOS, Windows NT/2000, NetWare. Неструктурированная модель файла позволяет легко организовать разделение файла между несколькими приложениями: разные приложения могут по-своему структурировать и интерпретировать данные, содержащиеся в файле.
Другая модель файла, которая применялась в ОС OS/360, DEC RSX и VMS, а в настоящее время используется достаточно редко, - это структурированный файл. В этом случае поддержание структуры файла поручается файловой системе. Файловая система видит файл как упорядоченную последовательность логических записей. Приложение может обращаться к ФС с запросами на ввод-вывод на уровне записей, например «считать запись 25 из файла FILE.DOC». ФС должна обладать информацией о структуре файла, достаточной для того, чтобы выделить любую запись. ФС предоставляет приложению доступ к записи, а вся дальнейшая обработка данных, содержащихся в этой записи, выполняется приложением. Развитием этого подхода стали системы управления базами данных (СУБД), которые поддерживают не только сложную структуру данных, но и взаимосвязи, между ними.
Логическая запись является наименьшим элементом данных, которым может оперировать программист при организации обмена с внешним устройством. Даже если физический обмен с устройством осуществляется большими единицами, операционная система должна обеспечивать программисту доступ к отдельной логической записи.
Файловая система может использовать два способа доступа к логическим записям: читать или записывать логические записи последовательно (последовательный доступ) или позиционировать файл на запись с указанным номером (прямой доступ).
Очевидно, что ОС не может поддерживать все возможные способы структурирования данных в файле, поэтому в тех ОС, в которых вообще существует поддержка логической структуризации файлов, она существует для небольшого числа широко распространенных схем логической организации файла.
К числу таких способов структуризации относится представление данных в виде записей, длина которых фиксирована в пределах файла (рис. 7.7, а). В таком случае доступ к n-й записи осуществляется либо путем последовательного чтения (n-1) предшествующих записей, либо прямо по адресу, вычисленному по ее порядковому номеру. Например, если L — длина записи, то начальный адрес n-й записи равен Lxn. Заметим, что при такой логической организации размер записи фиксирован в пределах файла, а записи в различных файлах, принадлежащих одной и той же файловой системе, могут иметь различный размер.
Другой способ структуризации состоит в представлении данных в виде последовательности записей, размер которых изменяется в пределах одного файла. Если расположить значения длин записей так, как это показано на рис. 7.7, б, то для поиска нужной записи система должна последовательно считать все предшествующие записи. Вычислить адрес нужной записи по ее номеру при такой логической организации файла невозможно, а, следовательно, не может быть применен более эффективный метод прямого доступа.
Файлы, доступ к записям которых осуществляется последовательно, по номерам позиций, называются пеиидексированпыми, или последовательными.
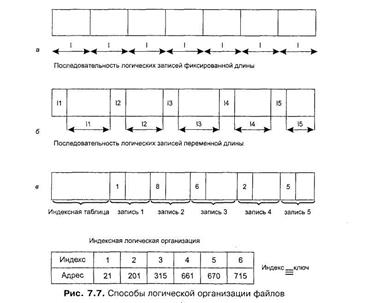
Другим типом файлов являются индексированные файлы, они допускают более быстрый прямой доступ к отдельной логической записи. В индексированном файле (рис. 7.7, в) записи имеют одно или более ключевых (индексных) полей и могут адресоваться путем указания значений этих полей. Для быстрого поиска данных в индексированном файле предусматривается специальная индексная таблица, в которой значениям ключевых полей ставится в соответствие адрес внешней памяти. Этот адрес может указывать либо непосредственно на искомую запись, либо на некоторую область внешней памяти, занимаемую несколькими записями, в число которых входит искомая запись. В последнем случае говорят, что файл имеет иидекаю-последователъную организацию, так как поиск включает два этапа: прямой доступ по индексу к указанной области диска, а затем последовательный просмотр записей в указанной области. Ведение индексных таблиц берет на себя файловая система. Понятно, что записи в индексированных файлах могут иметь произвольную длину.
Все вышесказанное в большей степени относится к обычным файлам, которые могут быть как структурированными, так и неструктурированными. Что же касается других типов файлов, то они обладают определенной структурой, известной файловой системе. Например, файловая система должна понимать структуру данных, хранящихся в файле-каталоге или файле типа «символьная связь».
Планирование заданий
Введение в планирование. Категории алгоритмов планирования. Задачи алгоритмов планирования. Планирование в системах пакетной обработки данных. Планирование в интерактивных системах. Планирование в системах реального времени.
Программное управление специальными регистрами маски (маскирование сигналов прерывания) позволяет реализовать различные дисциплины обслуживания:
· с относительными приоритетами, то есть обслуживание не прерывается даже при наличии запросов с более высокими приоритетами. После окончания обслуживания данного запроса обслуживается запрос с наивысшим приоритетом. Для организации такой дисциплины необходимо в программе обслуживания данного запроса наложить маски на все остальные сигналы прерывания или просто отключить систему прерываний;
· с абсолютными приоритетами, то есть всегда обслуживается прерывание с наивысшим приоритетом. Для реализации этого режима необходимо на время обработки прерывания замаскировать все запросы с более низким приоритетом. При этом возможно многоуровневое прерывание, то есть прерывание программ обработки прерываний. Число уровней прерывания в этом режиме изменяется и зависит от приоритета запроса;
· по принципу стека, или, как иногда говорят, по дисциплине LCFS (last come - а прерывания по нарушению питания;
Управление ходом выполнения задач со стороны ОС заключается в организации реакций на прерывания, в организации обмена информацией (данными и программами), предоставлении необходимых ресурсов, в динамике выполнения задачи и в организации сервиса. Причины прерываний определяет ОС (модуль, который называют супервизором прерываний), она же и выполняет действия, необходимые при данном прерывании и в данной ситуации. Поэтому в состав любой ОС реального времени прежде всего входят программы управления системой прерываний, контроля состояний задач и событий, синхронизации задач, средства распределения памяти и управления ею, а уже потом средства организации данных (с помощью файловых систем и т. д.). Следует, однако, заметить, что современная ОС реального времени должна вносить в аппаратно-программный комплекс нечто большее, нежели просто обеспечение быстрой реакции на прерывания.
Рассмотрим кратко основные виды ресурсов вычислительной системы и способы их разделения. Прежде всего, одним из важнейших ресурсов является сам процессор, точнее — процессорное время. Процессорное время делится попеременно (параллельно).
Вторым видом ресурсов вычислительной системы можно считать память. Оперативная память может быть разделена и одновременным способом (то есть в памяти одновременно может располагаться несколько процессов или, по крайней мере, текущие фрагменты, участвующие в вычислениях), и попеременно (в разные моменты оперативная память может предоставляться для разных вычислительных процессов). Память — очень интересный вид ресурса. Дело в том, что в каждый конкретный момент времени процессор при выполнении вычислений обращается к очень ограниченному числу ячеек оперативной памяти. С этой точки зрения желательно память разделять для возможно большего числа параллельно исполняемых процессов. С другой стороны, как правило, чем больше оперативной памяти может быть выделено для конкретного текущего процесса, тем лучше будут условия для его выполнения. Поэтому проблема эффективного разделения оперативной памяти между параллельно выполняемыми вычислительными процессами является одной из самых актуальных
Когда говорят о внешней памяти (например, память на магнитных дисках), то собственно память и доступ к ней считаются разными видами ресурса. Каждый из этих ресурсов может предоставляться независимо от другого. Но для полной работы с внешней памятью необходимо иметь оба этих ресурса. Собственно внешняя память может разделяться одновременно, а доступ к ней — попеременно.
Если говорить о внешних устройствах, то они, как правило, могут разделяться параллельно, если используются механизмы прямого доступа. Если же устройство работает с последовательным доступом, то оно не может считаться разделяемым ресурсом. Простыми и наглядными примерами внешних устройств, которые не могут быть разделяемыми, являются принтер и накопитель на магнитной ленте. Действительно, если допустить, что принтер можно разделять между двумя процессами, которые смогут его использовать попеременно, то результаты печати, скорее всего, не смогут быть использованы — фрагменты выведенного текста могут перемешаться таким образом, что в них невозможно будет разобраться. Аналогично обстоит дело и с накопителем на магнитной ленте. Если один процесс начнет что-то читать или писать, а второй при этом запросит перемотку ленты на ее начало, то оба вычислительных процесса не смогут выполнить свои вычисления.
Очень важным видом ресурсов являются программные модули. Прежде всего, мы будем рассматривать системные программные модули, поскольку именно они обычно и рассматриваются как программные ресурсы и в принципе могут быть распределены между выполняющимися процессами.
Как известно, программные модули могут быть однократно и многократно (или повторно) используемыми. Однократно используемыми называют такие программные модули, которые могут быть правильно выполнены только один раз. Это означает, что в процессе своего выполнения они могут испортить себя: либо повреждается часть кода, либо — исходные данные, от которых зависит ход вычислений. Очевидно, что однократно используемые программные модули являются неделимым ресурсом. Более того, их обычно вообще не распределяют как ресурс системы. Системные однократно используемые программные модули, как правило, используются только на этапе загрузки ОС. При этом следует иметь в виду тот очевидный факт, что собственно двоичные файлы, которые обычно хранятся на системном диске и в которых и записаны эти модули, не портятся, а потому могут быть повторно использованы при следующем запуске ОС.
Повторно используемые программные модули, в свою очередь, могут быть непривилегированными, привилегированными и реентерабельными.
Привилегированные программные модули работают в так называемом привилегированном режиме, то есть при отключенной системе прерываний (часто говорят, что прерывания закрыты), так, что никакие внешние события не могут нарушить естественный порядок вычислений. В результате программный модуль выполняется до своего конца, после чего он может быть вновь вызван на исполнение из другой задачи (другого вычислительного процесса). С позиций стороннего наблюдателя по отношению к вычислительным процессам, которые попеременно (причем, возможно, неоднократно) в течение срока своей «жизни» вызывают некоторый привилегированный программный модуль, такой модуль будет выступать как попеременно разделяемый ресурс. Структура привилегированных программных модулей изображена на рис. 5. Здесь в первой секции программного модуля выключается система прерываний. В последней секции, напротив, включается система прерываний.
Непривилегированные программные модули — это обычные программные модули, которые могут быть прерваны во время своей работы. Следовательно, в общем случае их нельзя считать разделяемыми, потому что если после прерывания выполнения такого модуля, исполняемого в рамках одного вычислительного процесса, запустить его еще раз по требованию другого вычислительного процесса, то промежуточные результаты для прерванных вычислений могут быть потеряны.
 В противоположность этому, реентерабельные программные модули (reenterable) допускают повторное многократное прерывание своего исполнения и повторный их запуск по обращению из других задач (вычислительных процессов). Для этого реентерабельные программные модули должны быть созданы таким образом, чтобы было обеспечено сохранение промежуточных вычислений для прерываемых вычислений и возврат к ним, когда вычислительный процесс возобновляется с прерванной ранее точки. Это может быть реализовано двумя способами: с помощью статических и динамических методов выделения памяти под сохраняемые значения. Основной, наиболее часто используемый динамический — способ выделения памяти для сохранения всех промежуточных результатов вычисления, относящихся к реентерабельному программному модулю, может быть проиллюстрирован с помощью рис. 6.
В противоположность этому, реентерабельные программные модули (reenterable) допускают повторное многократное прерывание своего исполнения и повторный их запуск по обращению из других задач (вычислительных процессов). Для этого реентерабельные программные модули должны быть созданы таким образом, чтобы было обеспечено сохранение промежуточных вычислений для прерываемых вычислений и возврат к ним, когда вычислительный процесс возобновляется с прерванной ранее точки. Это может быть реализовано двумя способами: с помощью статических и динамических методов выделения памяти под сохраняемые значения. Основной, наиболее часто используемый динамический — способ выделения памяти для сохранения всех промежуточных результатов вычисления, относящихся к реентерабельному программному модулю, может быть проиллюстрирован с помощью рис. 6.
Рис. 5. Структура привилегированного программного модуля
Основная идея построения и работы реентерабельного программного модуля, структура которого представлена на рис. 6, заключается в том, что в первой (головной) своей части с помощью обращения из системной привилегированной секции осуществляется запрос на получение в системной области памяти блока ячеек, необходимого для размещения всех текущих (промежуточных) данных. При этом на вершину стека помещается указатель на начало области данных и ее объем. Все текущие переменные реентерабельного программного модуля в этом случае располагаются в системной области памяти. Поскольку в конце привилегированной секции система прерываний включается, то во время работы центральной (основной) части реентерабельного модуля возможно ее прерывание. Если прерывание не возникает, то в третьей (заключительной) секции осуществляется запрос на освобождение использованного блока системной области памяти. Если же во время работы центральной секции возникает прерывание и другой вычислительный процесс обращается к тому же самому реентерабельному программному модулю, то для этого нового процесса вновь заказывается новый блок памяти в системной области памяти и на вершину стека записывается новый указатель. Очевидно, что возможно многократное повторное вхождение в реентерабельный программный модуль до тех пор, пока в области системной памяти, выделяемой специально для реентерабельной обработки, есть свободные ячейки, число которых достаточно для выделения нового блока.

Рис. 6. Реентабельный программный модуль
Что касается статического способа выделения памяти, то здесь речь может идти, например, о том, что заранее для фиксированного числа вычислительных процессов резервируются области памяти, в которых будут располагаться переменные реентерабельных программных модулей: для каждого процесса - своя область памяти. Чаще всего в качестве таких процессов выступают процессы ввода/вывода и речь идет о реентерабельных драйверах (реентерабельный драйвер может управлять параллельно несколькими однотипными устройствами).
Кроме реентерабельных программных модулей существуют еще повторно входимые (от re-entrance). Этим термином называют программные модули, которые тоже допускают свое многократное параллельное использование, но в отличие от реентерабельных их нельзя прерывать. Повторно входимые программные модули состоят из привилегированных секций и повторное обращение к ним возможно только после завершения какой-нибудь из таких секций. После выполнения очередной привилегированной секции управление может быть передано супервизору, и если он предоставит возможность выполняться другому процессу, то возможно повторное вхождение в рассматриваемый программный модуль. Другими словами, в повторно входимых программных модулях четко предопределены все допустимые (возможные) точки входа. Следует отметить, что повторно входимые программные модули встречаются гораздо чаще реентерабельных (повторно прерываемых).
Наконец, имеются и информационные ресурсы, то есть в качестве ресурсов могут выступать данные. Информационные ресурсы могут существовать как в виде переменных, находящихся в оперативной памяти, так и в виде файлов. Если процессы используют данные только для чтения, то такие информационные ресурсы можно разделять. Если же процессы могут изменять информационные ресурсы, то необходимо специальным образом организовывать работу с такими данными.
Алгоритмы планирования могут преследовать различные цели и обеспечивать разное качество мультипрограммирования. Например, в одном случае выбирается такой алгоритм планирования, при котором гарантируется, что ни один поток/процесс не будет занимать процессор дольше определенного времени, в другом случае целью является максимально быстрое выполнение «коротких» задач, а в третьем случае — преимущественное право занять процессор получают потоки интерактивных приложении. Именно особенности реализации планирования потоков в наибольшей степени определяют специфику операционной системы, в частности, является ли она системой пакетной обработки, системой разделения времени или системой реального времени.
Планирование в системах реального времени
В системах реального времени, в которых главным критерием эффективности является обеспечение временных характеристик вычислительного процесса, планирование имеет особое значение. Любая система реального времени должна реагировать на сигналы управляемого объекта в течение заданных временных ограничений. Необходимость тщательного планирования работ облегчается тем, что в системах реального времени весь набор выполняемых задач известен заранее. Кроме того, часто в системе имеется информация о временах выполнения задач, моментах активизации, предельных допустимых сроках ожидания ответа и т. д. Эти данные могут быть использованы планировщиком для создания статического расписания или для построения адекватного алгоритма динамического планирования.
При разработке алгоритмов планирования для систем реального времени необходимо учитывать, какие последствия в этих системах возникают при несоблюдении временных ограничений. Если эти последствия катастрофичны, как, например, для системы управления полетами или атомной электростанцией, то операционная система реального времени, на основе которой строится управление объектом, называется жесткой (hard). Если же последствия нарушения временных ограничений не столь серьезны, то есть сравнимы с той пользой, которую приносит система управления объектом, то система является мягкой (soft) системой реального времени. Примером мягкой системы реального времени является система резервирования билетов. Если из-за временных нарушений оператору не удается зарезервировать билет, это не очень страшно — можно просто послать запрос на резервирование заново.
В жестких системах реального времени время завершения выполнения каждой из критических задач должно быть гарантировано для всех возможных сценариев работы системы. Такие гарантии могут быть даны либо в результате исчерпывающего тестирования всех возможных сценариев поведения управляемого объекта и управляющих программ, либо в результате построения статического расписания, либо в результате выбора математически обоснованного динамического алгоритма планирования. При построении расписания надо иметь в виду, что для некоторых наборов задач в принципе невозможно найти расписания, при котором бы удовлетворялись заданные временные характеристики. С целью определения возможности существования расписания могут быть использованы различные критерии. Например, в качестве простейшего критерия может служить условие, что разность между предельным сроком выполнения задачи (после появления запроса на ее выполнение) и временем ее вычисления (при условии непрерывного выполнения) всегда должна быть положительной. Очевидно, что такой критерий является необходимым, но недостаточным. Точные критерии, гарантирующие наличие расписания, являются очень сложными в вычислительном отношении.
В мягких системах реального времени предполагается, что заданные временные ограничения могут иногда нарушаться, поэтому здесь обычно применяются менее затратные способы планирования.
Кроме прерываний от таймера в системах реального времени перепланирование задач может происходить по прерываниям от внешних устройств — различного вида датчиков и исполнительных механизмов.
Дата добавления: 2020-03-21; просмотров: 922;
Поиск по сайту
Узнать еще
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Основная психофизиологическая проблема
- III. СТРУКТУРА И ОРГАНИЗАЦИЯ ДЕЯТЕЛЬНОСТИ
- III.4. Геоэкологическая роль технического прогресса
- IV.1.7. ПСИХОЛОГИЧЕСКАЯ ДИАГНОСТИКА И КОРРЕКЦИЯ ПРИ РАННЕМ ДЕТСКОМ АУТИЗМЕ
- LOAD_FILE(имя_файла)
- Nord Stream и экологическая безопасность Балтийского моря
- V.7. ПСИХОЛОГИЧЕСКАЯ ДИАГНОСТИКА

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
