Характеристики и режимы электропривода при питании якорной цепи от источника тока
В ряде применений якорная цепь двигателя постоянного тока независимого возбуждения питается не от источника напряжения, как в предыдущем случае, а от источника тока  — рис. 3.18. При этом, естественно, сохраняют силу фундаментальные соотношения (3.1) — (3.3), однако свойства электропривода радикально изменяются.
— рис. 3.18. При этом, естественно, сохраняют силу фундаментальные соотношения (3.1) — (3.3), однако свойства электропривода радикально изменяются.
Электромеханическая  и механическая
и механическая  характеристики представлены теперь вертикальными прямыми (рис. 3.19)
характеристики представлены теперь вертикальными прямыми (рис. 3.19)
и 


и привод приобретает новое свойство «источника момента». Это связано с тем, что источник питания — источник тока — нейтрализует действие ЭДС, она теперь уже не играет роли внутреннего регулятора и не влияет на скорость. В свою очередь, напряжение  становится зависимой переменной
становится зависимой переменной
и характеристика  (рис. 3.19) определяет
(рис. 3.19) определяет
энергетические режимы работы электропривода. Режима идеального холостого хода в рас 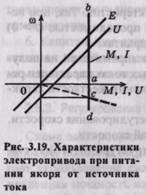 сматриваемой
сматриваемой  структуре нет — «источник момента».
структуре нет — «источник момента».
Двигательный режим соответствует участку ab в I квадранте:  т.е. механическая энергия поступает к потребителю — технологической машине,
т.е. механическая энергия поступает к потребителю — технологической машине,  — электрическая энергия поступает к своему потребите-
— электрическая энергия поступает к своему потребите-
лю — двигателю.
Режим короткого замыкания — точка а, здесь 
На участке  т.е. механическая энергия поступает от техно-
т.е. механическая энергия поступает от техно-
логической машины и, преобразуясь в электрическую, передается в якорную цепь; по-прежнему  — электрическая энергия от источника тока также поступает в якорную цепь. Этот режим мы определили раньше как торможение противовключением.
— электрическая энергия от источника тока также поступает в якорную цепь. Этот режим мы определили раньше как торможение противовключением.
В точке  — режим динамического торможения: вся поступив-
— режим динамического торможения: вся поступив-
шая механическая энергия рассеивается в сопротивлениях якорной цепи.
И, наконец, на участке  — рекуперативное тормо-
— рекуперативное тормо-
жение, если источник тока позволяет передать энергию в сеть. Если источник тока обладает односторонней проводимостью (пунктир на рис. 3.18), этого режима не будет, и электропривод будет продолжать работать в режиме динамического торможения (полужирная штриховая линия на рис. 3.19).
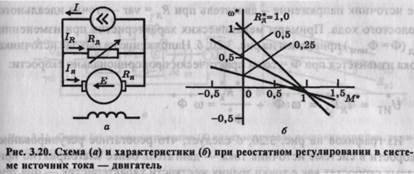
При питании якорной цепи от источника тока  реостатное
реостатное
регулирование осуществляется включением добавочного резистора  параллельно якорю (рис. 3.20, а); характеристики при этом существенно изменяются, появляется возможность регулировать как момент, так и скорость.
параллельно якорю (рис. 3.20, а); характеристики при этом существенно изменяются, появляется возможность регулировать как момент, так и скорость.
Для схемы на рис. 3.20, а реостатные характеристики можно получить из основных уравнений (3.1) и (3.2)

и

дополненных уравнениями для электрических цепей:
Здесь мы использовали относительные величины, приняв за базовые, как и раньше, 
Совместное решение уравнений дает:

Наличие контура якорь — дополнительный резистор, в котором реализуется действие ЭДС вращения  приводит к характеристикам, аналогичным традиционным, получаемым при питании якоря от источника напряжения. Отличие, однако, состоит в том, что скорость идеального холостого хода
приводит к характеристикам, аналогичным традиционным, получаемым при питании якоря от источника напряжения. Отличие, однако, состоит в том, что скорость идеального холостого хода
теперь зависит от сопротивления дополнительного резистора  а момент короткого замыкания
а момент короткого замыкания
при малых  практически не зависит от
практически не зависит от 
Таким образом, в системе источник тока — двигатель с шунтирующим резистором общей точкой механических характеристик при 
 является точка короткого замыкания, тогда как в систе-
является точка короткого замыкания, тогда как в систе-
ме источник напряжения - двигатель при  — точка идеального
— точка идеального
холостого хода. Примеры механических характеристик при изменении  приведены на рис. 3.20, б. Напряжение на выходе источника тока изменяется при
приведены на рис. 3.20, б. Напряжение на выходе источника тока изменяется при  практически пропорционально скорости:
практически пропорционально скорости:

Из графиков на рис. 3.20, б следует, что реостатное регулирование скорости в системе источник тока — двигатель более благоприятно при малых скоростях как с точки зрения жесткости характеристик — она тем выше, чем меньше скорость, так и с точки зрения потерь — они уменьшаются с уменьшением скорости.
Изменяя магнитный поток машины в соответствии с (3.18) можно получить семейство вертикальных механических характеристик от 
до  т.е. при неуправляемом силовом преобразователе — источни-
т.е. при неуправляемом силовом преобразователе — источни-
ке тока — электропривод приобретает свойство управляемого по цепи возбуждения «источника момента». Эта особенность электропривода может быть особенно эффективно использована в замкнутых структурах.
Дата добавления: 2020-03-17; просмотров: 540;
Поиск по сайту
Узнать еще
- A. Узагальнені координати і узагальнені швидкості та прискорення
- API как средство интеграции приложений.
- C04 ППВ с комментариями и примерами
- Cыры, созревающие при участии слизи.
- F00 Деменция при болезни Альцгеймера
- F50 Расстройства приема пищи
- F51 Расстройства сна неорганической природы
- F63 Расстройства привычек и влечений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
