Расчет входного каскада в двигатель
Рассчитаем характеристики исходя из паспортных данных выбранного двигателя.
Таблица 8 - Технические данные ЭД подачи 1FT6-084-8SF71-1AG1
| Параметр | Значение |
| Nn; мин−1 | |
| H; мм | |
| Pn; кВт при ∆T=100 K | 6,9 |
| Mo; Нм при ∆T=100 K | |
| K перегрузочная способность | |
| Mn; Нм при ∆T=100 K | |
| In; A при ∆T=100 K | |
| Количество пар полюсов | |
| Момент инерции ротора (без тормоза) J; 10−4 кгм2 | |
| Вес кг |
Расчет синхронного двигателя привода подачи [5].
Рассмотрим параметры канала регулирования скорости:
1 Передаточная функция датчика тока по оси Z:
- номинальный сигнал задания РТ:

- индуктивность ротора:
 (3.21)
(3.21)
где X2=0.28
- индуктивность статора:
 (3.22)
(3.22)

где X1=0.31
- коэффициент рассеивания магнитных полей статора и ротора:

- число пар полюсов:
 (3.23)
(3.23)

- взаимная индуктивность между статором и ротором:
 (3.24)
(3.24)

- номинальная частота вращения ротора:
 (2.19)
(2.19)

- номинальный момент:
- коэффициент трансформации:
- номинальное потокосцепление:
 (3.25)
(3.25)

- проекция номинального тока на ось Z:
 (3.26)
(3.26)
- перегрузочная способность:

- коэффициент датчика тока:
 (3.27)
(3.27)

2 Передаточная функция регулятора тока:
- статический коэффициент передачи ЧП:
 (3.28)
(3.28)

- некомпенсированная постоянная времени:

 (3.29)
(3.29)

где R1=0,18 статорное сопротивление R2=0,32 роторное активное сопротивление
- постоянная времени статора:
 (3.30)
(3.30)

- коэффициент передачи пропорциональной части ПИ-регулятора:
 (3.31)
(3.31)

- постоянная времени регулятора:
 (3.32)
(3.32)

3 Передаточная функция частотного преобразователя:

- постоянная времени ЧП:


3 Передаточная функция электрической части СД по каналу регулирования тока:
- постоянная времени ПФ электрической части СД:
 (3.33)
(3.33)


 ,
, 
4 Передаточная функция механической части двигателя:
 - маховый момент ротора двигателя;
- маховый момент ротора двигателя;
 (3.34)
(3.34)
5 Передаточная функция ПИ-регулятора скорости:
- коэффициент обратной связи по скорости:

- коэффициент передачи регулятора скорости:
 (2.30)
(2.30)
- постоянная времени интегрирующей части ПИ-регулятора:
 (3.35)
(3.35)


6 Передаточная функция датчика скорости
- коэффициент обратной связи по скорости:

Канал регулирования потокосцепления Ψ2
7 Передаточная функция канала ОС по току I1x:
- постоянная времени ротора:
 (3.36)
(3.36)

 (2.33)
(2.33)
- коэффициент передачи звена:


8 Передаточная функция ПИ-регулятора тока I1x:
- коэффициент передачи пропорциональной части ПИ-регулятора:
 (3.37)
(3.37)

- постоянная времени интегрирующей части ПИ-регулятора, с
 (3.38)
(3.38)

9 Передаточная функция цепи обратной связи по потокосцеплению:
- коэффициент передачи звена:

10 Передаточная функция регулятора потокосцепления:
- постоянная времени регулятора:

- коэффициент передачи пропорциональной части ПИ-регулятора:
 (3.39)
(3.39)

- постоянная времени ПИ-регулятора потокосцепления:
 (3.40)
(3.40)


11 Передаточная функция электрической части двигателя по каналу регулирования тока i1x:
- коэффициент передачи звена:
На основании принципиальной схемы было произведено разделение электромеханической системы на звенья направленного действия. Эти звенья – электродвигатель, получающий энергию от преобразователя, регуляторы тока и скорости и цепи обратных связей с соответствующими коэффициентами передач.
Для управления электродвигателями с максимальным током равным 15 А выбираем IGBT – транзисторы типа IRG4BC30KD его технические параметры:
- максимальное напряжение кэ, В 360;
- максимальный ток кэ, A 18;
- управляющее напряжение, В 2.5;
- мощность макс., Вт 200;
- температурный диапазон, С -40...175.
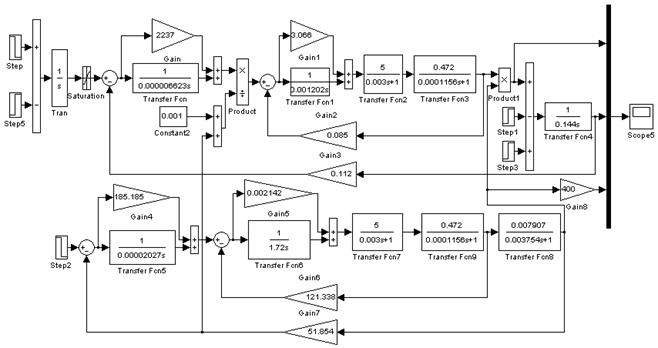
Рисунок 3.15 - Структурная схема привода
Для обеспечения управляющего напряжения в 2,5 В. В цепь между микроконтроллером и транзистором необходимо включить резистор.
Расчет резистора R4
 , (3.41)
, (3.41)
где Uб – управляющее напряжение базы транзистора
В качестве резистора R4 выбираем С1-4 0,25Вт, 5% 120 Ом
Номиналы резисторов R4 и R5 идентичны.
Расчет датчика тока
Для контроля над током, протекающим через электродвигатель, в цепь его питания вводим резистор R6. Напряжение, снимающееся с этого резистора, поступает на один из входов микроконтроллера, по повышению уровня этого напряжения контроллер прекращает подачу питания на электродвигатель.
Сопротивление рассчитывается по формуле
 , (3.42)
, (3.42)
где Imax – максимальный ток электродвигателя;
Uл1 – напряжение логической единицы.
Так как минимальный номинал резисторов начинается от 1 Ома, то придется ввести в схему несколько параллельно соединенных резисторов. Это необходимо для получения эквивалентного сопротивления, величину которого можно подобрать близкой по значению к посчитанному ранее.
Взяв за основу три резистора с минимальным возможным сопротивлением равным 1 Ом, рассчитаем эквивалентное сопротивление Rэкв
 . (3.43)
. (3.43)
Получим
 .
.
Сопротивление равное 0,33 Ома вполне подходит для стабильной работы схемы. Поэтому в качестве резисторов R6 выбираем SMD резистор ЧИП РЕЗ 0,5Вт, 5% 1 Ом.
На принципиальной схеме параллельное включение резисторов условно заменено одним резистором R6.
Расчет площади радиатора выходных транзисторных ключей
Площадь радиатора выходных транзисторных ключей рассчитывается по формуле
 , (3.44)
, (3.44)
где tmax – максимальная температура транзистора;
tокр – температура окружающей среды;
Pvt – мощность транзистора;
Rt – тепловое сопротивление.
Получим
 .
.
Радиаторы устанавливаются на каждый транзистор.
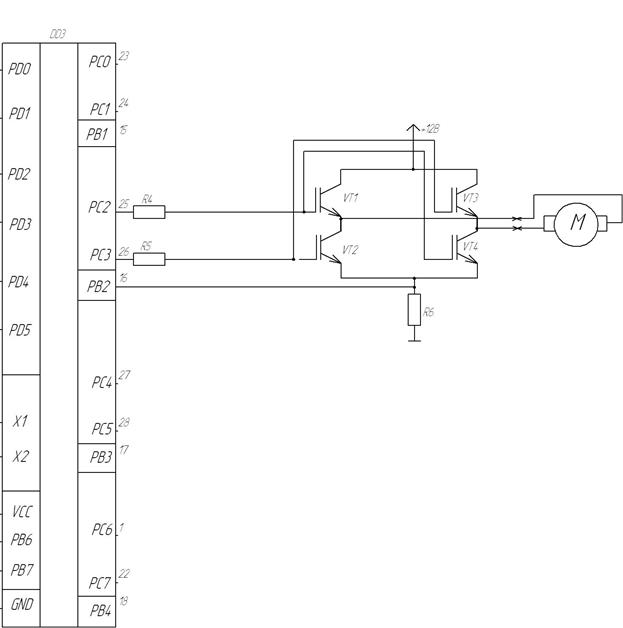
Рисунок 3.16 – Разработанная схема управления приводом подачи
Дата добавления: 2020-02-05; просмотров: 678;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- F82 Специфическое расстройство развития двигательных функций
- I. ДВИГАТЕЛЬНАЯ СФЕРА
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- IV. РАСЧЕТ РЕКТИФИКАЦИОННЫХ КОЛОНН
- Iт – обратный тяговый ток; М – тяговый двигатель электропоезда.
- V. ПРИМЕР РАСЧЕТА ФИЛЬТРА ВЫСОКИХ ЧАСТОТ ЧЕБЫШЕВА
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
