На рисунке 3.5 показан алгоритм выбора позиционного привода
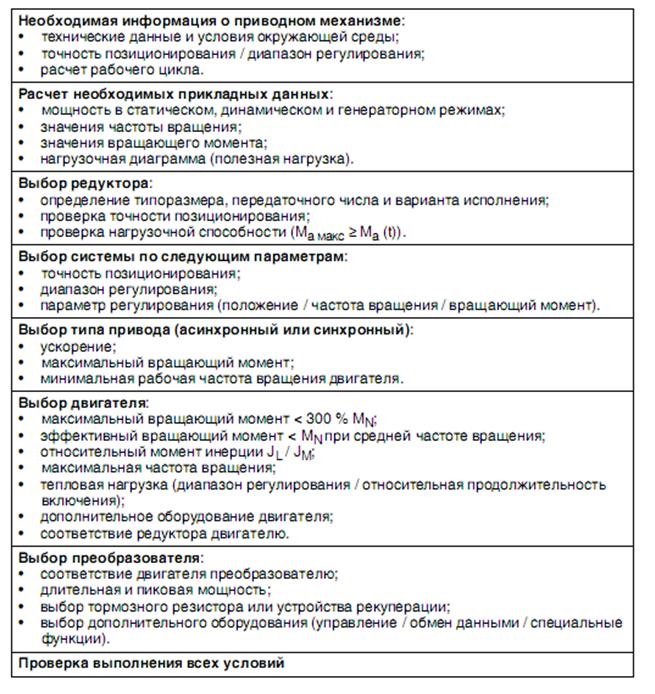
Рисунок 3.5 - Алгоритм выбора позиционного привода
Электродвигатели с постоянным магнитом бывают односкоростными и двухскоростными.
Односкоростные двигатели имеют две щетки, расположенные друг напротив друга.
Двухскоростные двигатели имеют три щетки, причем дополнительная щетка расположена под небольшим углом относительно одной из щеток и имеет меньшую ширину. Напряжение, подаваемое на дополнительную щетку, увеличивает скорость вращения электромотора.
Двухскоростную работу двигателя можно обеспечить также за счет последовательного подключения добавочного резистора в обмотку возбуждения или последовательно с двигателем.
Анализ основного математического аппарата расчета приводов
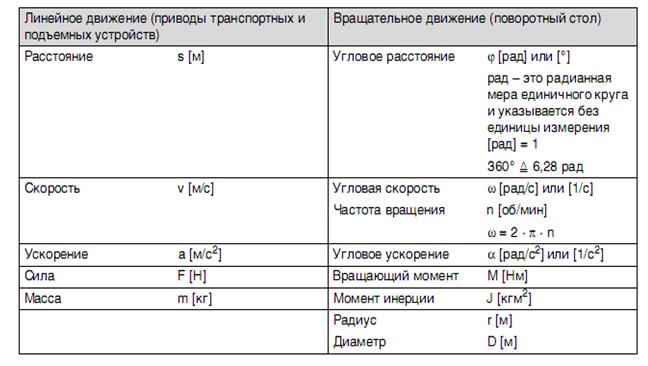
В работе приводных систем можно выделить три основных вида движения (Таблица 3.2)
Таблица 3.2 - Три основных вида движения
Составим основные уравнения движения и выявим основные функции вычисления (рисунки 3.6 – 3.8).
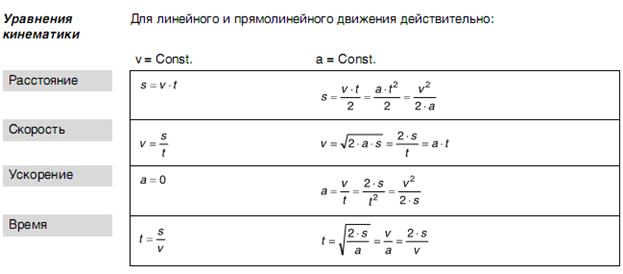
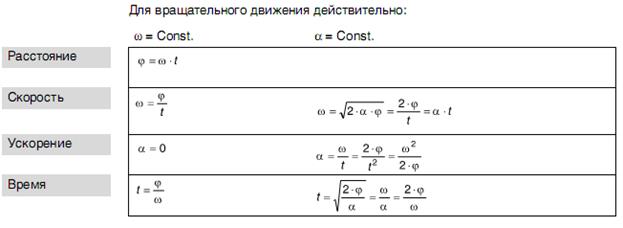
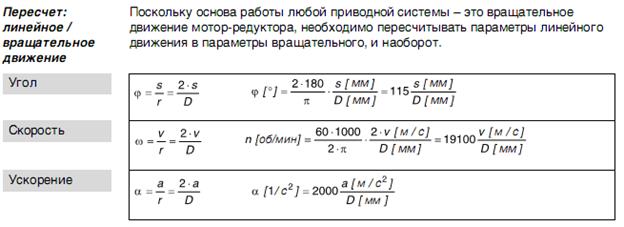
Рисунок 3.6 – Основные формулы расчета параметров привода
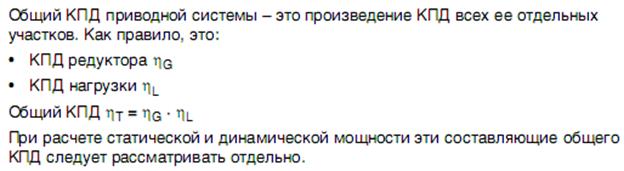
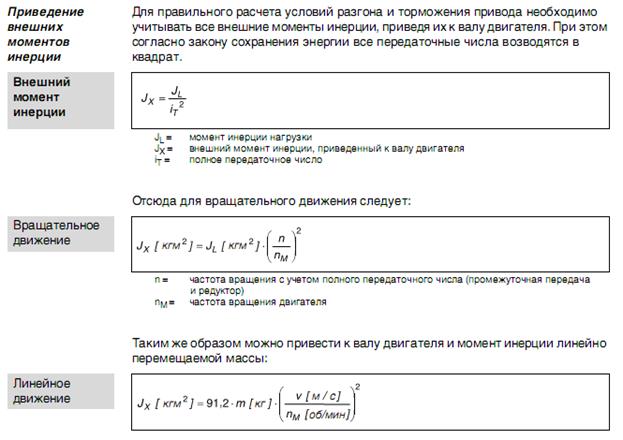
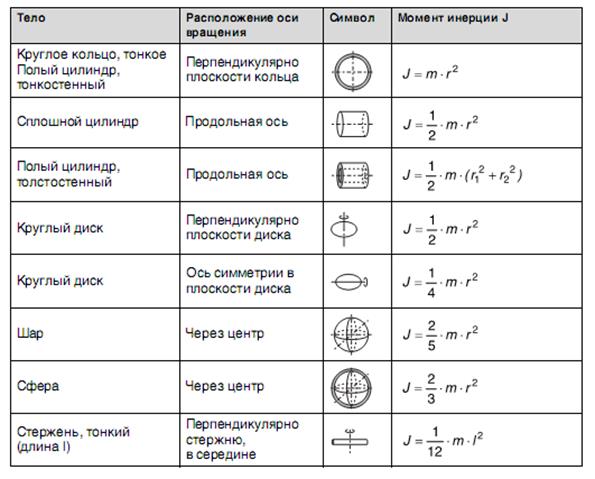
Рисунок 3.7 – Основные формулы расчета моментов инерции
Вращающий момент
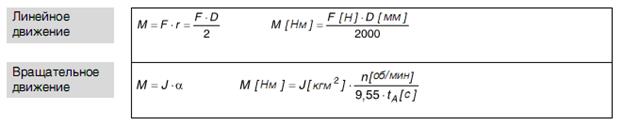
Мощность

Рисунок 38 – Основные формулы вычисления момента вращения и мощности
Дата добавления: 2020-02-05; просмотров: 889;
Поиск по сайту
Узнать еще
- А) в свежеуложенном бетоне; б) комбинированным способом; в) в затвердевшем бетоне; г) продольный шов; пунктиром показана обмазка штырей битумом
- А.3 Общий коэффициент полезного действия привода шасси.
- Алгоритм анализа педагогической ситуации и решения педагогических задач.
- Алгоритм анализа последствий неадекватного поведения элемента на смежный с ним
- Алгоритм базовых реанимационных мероприятий (приложение 1)
- Алгоритм безопасного хэширования (Secure Hash Algorithm, SHA)
- Алгоритм Беллмана-Форда
- Алгоритм БПФ с прореживанием по времени

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
