Электрические системы управления кранов
В качестве примера рассмотрим электрическую систему управления кранов типа
2КЭГ.
В этой системе усилием руки осуществляется только включение и выключение вы
ключателей.
Система состоит из выключателей; коммутационной аппаратуры; электромагнитов гидроэлектроманипуляторов; системы дистанционного управления, состоящей из сельси
нов, и конечных выключателей различного назначения.
Электромагнитами этой системы осуществляется управление вспомогательными золотниками гидроэлектроманипуляторов для выполнения гидроуправления основных зо-
лотников.
Гидроэлектроманипуляторы используются для реверсирования и остановки гидро-
приводов крана.
Система управления с сельсинами применяется для регулирования подачи аксиаль
но-поршневых насосов. Исполнительные механизмы этой системы, воздействуя на сервоприводы насосов, изменяют их подачу по величине и по направлению.
Конечные выключатели выполняют защитные функции, прерывая электропитание и останавливая действие соответствующих приводов крана.
В эксплуатации электрической системы управления возникают неисправности и отказы, приводящие к неисправностям и отказам крана.
Следует четко различать отказы в системе управления и в гидроприводах механиз-
мов крана. При появлении отказа необходима проверка прежде всего системы управления.
Механик поэтому должен уметь выполнить эту проверку даже при отсутствии соот
ветствующей инструкции.
Схема управления электроприводом каждого крана обеспечивает ( рис.194 ):
1. сигнализацию готовности электропривода к пуску - горят зеленые лампы Л15 (при температуре масла +12°С и выше) и Л17 (при допустимом уровне масла);
2. пуск и остановку электродвигателей 1-М1 (2-М 1) насосной станции и 1-М2 (2-М2) вентилятора при помощи кнопок «Пуск» и «Стоп» щитов 1-ЩПС и 2-ЩПС (здесь и далее первая цифра 1 обозначает принадлежность элемента к первому, а цифра 2 -ко второму из двух спаренных кранов, на схеме рис. 23 эти цифры опущены);
3. пуск и остановку электродвигателя 1-Ml при помощи кнопок КнП2 и КнС2 щита 2-ЩПС при работе крана в сдвоенном режиме.
При ремонтных работах и в аварийных случаях пуск и остановку двигателя можно производить кнопками КнП и КнС, встроенными в станцию управления СУ;
4. невозможность пуска электродвигателя 1-М1 (2-М1) насосной станции при темпе
ратуре масла ниже +12°С и выше +80°С, а также при уровне масла в баке ниже допустимо
го;
5. защиты электродвигателей: от коротких замыканий (автоматическим выключате-
лем на питающем фидере), тепловую (реле РТ) и минимально-нулевую (реле и контакто-
рами, которые отключают схему при глубоком провале до 20 % или исчезновении напря-
жения).
Пуск электропривода осуществляется в следующей последовательности.
После подачи питания и включения автоматических выключателей 1ЩА1-В (2ЩА1-В), 1ЩА2-В2 (2ЩА2-В2), 1ЩА2-ВЗ (2ЩА2-ВЗ), 1ЩА2-В4 (2ЩА2-В4) при температуре масла ниже +12°С через контакт реле-датчика температуры 1-ДРТ2 (2-ДРТ2) получат питание катушка контактора КЛ магнитного пускателя 1-ПМ2 (2-ПМ2) и желтая сигнальная лампа Л16 в щитах 1-ЩПС и 2-ЩПС.
Магнитный пускатель 1-ПМ2 (2-ПМ2) включит подогрев масла с помощью нагре
вателей 1-НМ1 и 1-НМ2 (2-НМ1 и 2-НМ2).
При достижении температуры +12°С и выше контакт датчика-реле температуры 1-ДРТ2 (2-ДРТ2) переключается, разрывая цепь катушки контрактора КЛ магнитного пускателя 1-ПМ2 (2-ПМ2), а также сигнальной лампы Л16 и замыкая цепь сигнальной
лампы Л15 в щитах 1-ЩПС и 2-ЩПС.
При этом электронагреватели масла отключаются.
Если температура масла перед началом работы крана была выше +12°С, то сигналь
ная лампа Л15 загорается сразу после подачи напряжения.
При нажатии кнопки КнП1 щита ЩПС получит питание катушка контактора Y
( «звезда» ) через замыкающий контакт реле ЩУ-РП щита управления, а затем катушка линейного контактора КЛ.
Контакторы Y и КЛ срабатывают и своими главными контактами подключают эле-
ктродвигатель Ml насосной станции к сети по схеме «звезда».
Одновременно замыкаются два вспомогательных контакта КЛ, один из которых шунтирует блок-контакт контактора Y, а второй подготавливает цепь включения катушки контактора Δ ( «треугольник» ).
Кроме того, размыкаются два контакта вспомогательной цепи реле времени РВ1 и РВ2. При этом сначала теряет питание реле РВ1, которое, размыкая с выдержкой времени свой контакт, в свою очередь отключает реле времени РВ2.
Последнее с выдержкой времени размыкает свой контакт в цепи катушки контакто
ра Y ( «звезда» ).
Контактор, потеряв питание, размыкает свои главные контакты, отключая схему «звезда».
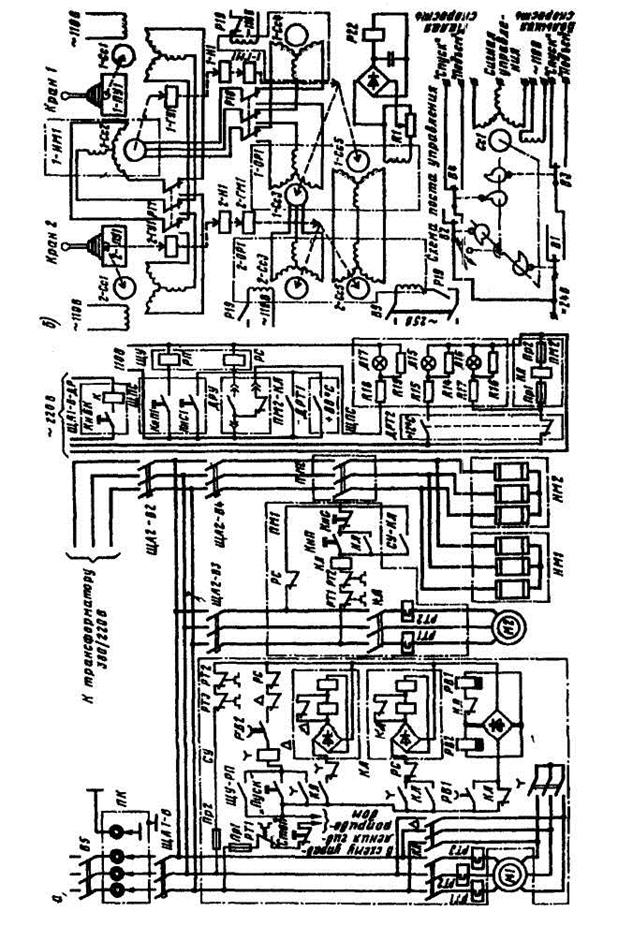
Рис. 194. Схема управления электроприводом гидравлического крана
Размыкание двух вспомогательных контактов контактора Y в цепи собственной катушки и цепи катушки КЛ изменений в схему не вносит, а замыкание блок-контактов Y в цепи катушки контактора Δ ( «треугольник» ) вызывает срабатывание последнего и включение обмоток двигателя Ml по схеме «треугольник».
Электродвигатель разгоняется окончательно и работает на своей основной характе
ристике ( обмотка статора двигателя соединена в «треугольник» ).
Выключение электродвигателей насосной станции и электровентилятора осуществ
ляется кнопкой КнС1 щита 1-ЩПС (2-ЩПС).
В сдвоенном режиме возможно выключение электродвигателя 1-М1 кнопкой КнС2 щита 2-ЩПС.
В аварийном случае кнопкой Кн1 включается дистанционный расцепитель ЩА1-В-
ДР автоматического выключателя ЩА1 -В. При этом полностью снимается питание с кра-
на и электродвигатели 1-М1 и2-М1 отключаются.
Если во время работы крана температура масла достигнет +80°С и выше, электро-
двигатели насосной станции и электровентилятора автоматически отключаются датчиком-реле температуры 1-ДРТ1 (2-ДРТ1), который своим замкнувшимся контактом включает реле остановки PC в щите ЩУ, которое, в свою очередь, отключает контактор КЛ схемы управления Ml.
В случае понижения уровня масла в баке ниже допустимого датчик-реле уровня 1-ДРУ (2-ДРУ) включает реле PC, которое также, как при перегреве масла, отключит двига-
тели Ml, M2 и сигнальную лампу Л17.
Одновременная работа двух палубных кранов
Одновременная работа двух палубных кранов на судах называется работой в «спарке».
Система управления гидроприводом сдвоенного крана предусматривает одновре-
менную работу гидроприводов двух грузовых и двух лебедок изменения вылета стрелы.
Поворот сдвоенного крана выполняется гидроприводом общей платформы обоих кранов.
Управление четырьмя гидроприводами лебедок осуществляется из кабины крана № 2 (ведущего). Другой кран ( №1 ) является ведомым.
Для синхронизации двух грузовых и двух лебедок изменения вылета стрелы приме
нена сельсинная схема.
На рис. 194, б приведена упрощенная схема синхронизации гидроприводов грузо-
вых лебедок кранов в режиме «Спарки» ( одновременной работы обоих кранов ).
Режим сдвоенной работы обеспечивается включением предназначенным для этого выключателем на щите питания.
После его включения контактами реле Р19 будет подано напряжение на обмотки возбуждения сельсинов отсчетного редуктора 2-ОР1, реле Р17 переключит обмотку стато-
ра сельсина исполнительного механизма 1-ИМ2 ведомого крана на обмотки синхрониза
ции сельсина 2-Сс1 поста управления 2-ПУ ведущего крана, а реле Р16 соединит роторную обмотку 1-Сс2 со статором сельсина 1-СсЗ в отсчетном редукторе 1-ОР1.
Кроме того, произойдет отключение гидроманипуляторов поворота кранов, и будет подготовлена к работе цепь включения гидроманипулятора поворота общей платформы кранов.
Поворот рукоятки поста управления 2-ПУ 1 ведущего крана 2, например, на себя приведет непосредственно к смещению золотника сервопривода насоса 2-Н1.
Отработка сервопривода 2-ГУ1 внутри насоса вызовет поворот люльки и подачу масла к гидромотору 2-ГМ1. Грузовая лебедка крана № 2 начинает выбирать трос, подни-
мая гак. Одновременно с рукояткой 2-ПУ1 повернется ротор сельсина 2-Сс1, а вместе с ним и ротор дифференциального сельсина 1-Сс2 в исполнительном механизме 1-ИМ2 крана № 1.
Это вызовет синхронную отработку гидросистемы крана № 1 так же, как это проис
ходило в гидросистеме крана № 2, так как тяга 1-ИМ2 связана с золотником сервопривода насоса 1-HI.
Обе грузовые лебедки с одинаковой скоростью поднимают свои гаки.
Контроль за синхронностью их работы осуществляют отсчетные редукторы 1-ОР1 и 2-ОР1.
Если частота вращения гидромоторов (а значит, и барабанов) неодинакова, сельси
ны в отсчетных редукторах рассогласуются.
Уравнительные токи в цепях дифференциальных сельсинов 1-СсЗ и2-СсЗ вызовут поворот ротора последнего на некоторый угол вперед или назад. Направление поворота валика 1 -Сс2 будет зависеть от направления рассогласования отсчетных редукторов 2-ОР1 и 1-ОР1.
Если ведомый кран отстает от ведущего, то валик 1-Сс2 повернется на некоторый дополнительный угол вперед по сравнению с заданным рукояткой поста управления 2-ПУ1. Подача насоса 1-Н1 несколько возрастет, что приведет к увеличению частоты вращения гидромотора 1-ГМ1 и связанного с ним барабана лебедки крана 1.
При опережении отработка системы синхронизации будет обратной. Таким путем отсчетные редукторы 2-ОР1 и 1-ОР1 постоянно следят за синхронностью работы грузовых лебедок кранов № 1 и № 2.
Вторая пара сельсинов (1-Сс5 и 2-Сс5), находящихся в отсчетных редукторах, рабо
тает в трансформаторном режиме. Их рассогласование на недопустимый угол вызовет повышение напряжения на обмотке возбуждения сельсина-трансформатора 1-Сс5, которая через потенциометр R1 и выпрямительный мостик подключена к катушке реле Р22.
Контактами последнего электроприводы грузовых лебедок обоих кранов отключа-
ются ( отключающая цепь с контактами реле Р22 на рис.23 не показана).
Приводы останавливаются и затормаживаются.
Для включения их в работу необходимо перейти на режим одиночной работы, от-
ключив выключатель сдвоенного режима, согласовать лебедки по высоте гаков и только после этого включить приводы на спаренный режим.
Степень рассогласования приводов, при котором происходит их отключение, мож-
но изменять с помощью потенциометра R1.
В тех случаях, когда в строгой синхронизации нет необходимости, выключателем В9 снимают возбуждение сельсина 2-Сс5.
Ротор сельсина 1-Сс4 заторможен. В режиме спаренной работы возбуждение этого сельсина отключено контактами реле Р19. В режиме одиночной работы крана № 1 этот сельсин включается в работу и обеспечивает возбуждение дифференциального сельсина 1-Сс2 исполнительного механизма 1-ИМ2.
Принцип действия системы синхронизации лебедок изменения вылета стрелы ана-
логичен описанному.
Пост управления механизмом подъема груза
Пост управления механизмом подъема груза крана КЭГ имеет следующее устройст
во.
Рукоятка поста управления может поворачиваться относительно двух взаимно пер-
пендикулярных осей, благодаря чему создана возможность работы гидропривода грузовой лебедки на двух скоростях: большой и малой.
Для работы привода на большой скорости рукоятку управления из нейтрального положения отклоняют вправо, а затем «на себя» (подъем) или «от себя» (спуск).
При отклонении рукоятки вправо и «на себя» срабатывают микропереключатели В1 и ВЗ, которые своими контактами через промежуточное реле включают электромагни
ты гидроманипуляторов.
Лебедка растормаживается и работает на подъем на большой скорости. Отклонение рукоятки вправо и «от себя» вызывает срабатывание В1, а ВЗ включает верхнюю цепь (спуск). Лебедка работает с большой скоростью на спуск.
Для работы на малой скорости рукоятку отклоняют влево и «на себя» (подъем) или «от себя» (спуск). Поворот рукоятки влево вызывает срабатывание микропереключателя В2 и включение малой скорости. Микропереключателем В4 обеспечивается включение привода на подъем или спуск груза с малой скоростью.
В пределах каждого отклонения рукоятки независимо от того, которая из двух ско-
ростей выбрана, управление частотой вращения гидропривода выполняется путем воздей-
ствия дистанционной системы управления на сервоприводы насосов регулируемой пода-
чи.
Дата добавления: 2020-02-05; просмотров: 1111;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
