Регулирование скорости вращения двигателя шунтированием якоря
Для получения сравнительно жестких механических характеристик двигателя при низких скоростях вращения часто используют шунтирование якоря резистором  , при обязательном включении в цепь якоря добавочного сопротивления
, при обязательном включении в цепь якоря добавочного сопротивления  . Очевидно, что и образуют делитель напряжения. На работу делителя большое влияние оказывает нагрузка двигателя, поскольку по сопротивлению протекает ток
. Очевидно, что и образуют делитель напряжения. На работу делителя большое влияние оказывает нагрузка двигателя, поскольку по сопротивлению протекает ток  , потребляемый из сети. Следовательно, падение напряжения зависит от . При таком включении двигателя используется совместно два способа регулирования: изменением подводимого к якорю напряжения и изменением сопротивления якорной цепи. За счет использования двух способов регулирования получаем характеристики, которые занимают промежуточное положение между характеристиками, полученными за счет изменения напряжения, и характеристиками, полученными за счет изменения сопротивления в цепи якоря [1; 2]. Запишем уравнения, описывающие данную схему (рис. 4.20):
, потребляемый из сети. Следовательно, падение напряжения зависит от . При таком включении двигателя используется совместно два способа регулирования: изменением подводимого к якорю напряжения и изменением сопротивления якорной цепи. За счет использования двух способов регулирования получаем характеристики, которые занимают промежуточное положение между характеристиками, полученными за счет изменения напряжения, и характеристиками, полученными за счет изменения сопротивления в цепи якоря [1; 2]. Запишем уравнения, описывающие данную схему (рис. 4.20):
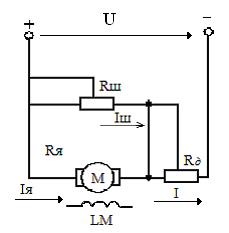
Рис. 4.20. Схема включения ДПТ НВ
 ,
,
 ,
,
 .
.
Найдем из этих выражений ЭДС  :
:
 .
.
В этом выражении заменим  - коэффициент деления делителя напряжения при идеальном холостом ходе двигателя. Разделим обе части этого выражения на
- коэффициент деления делителя напряжения при идеальном холостом ходе двигателя. Разделим обе части этого выражения на  и получим уравнения электромеханической и механической характеристик:
и получим уравнения электромеханической и механической характеристик:
 ,
,
 . (4.21)
. (4.21)
Как видим, и электромеханические, и механические характеристики линейны при =const. Построим эти характеристики (рис. 4.21).
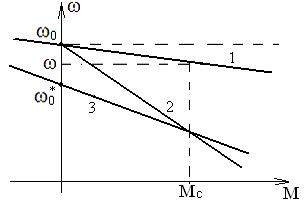
Рис. 4.21. Механические характеристики ДПТ НВ
1 – естественная характеристика;
2 – реостатная характеристика;
3 – характеристика, полученная при шунтировании якоря
Как видно из рис. 4.21,  на характеристике 3 меньше скорости идеального холостого хода
на характеристике 3 меньше скорости идеального холостого хода  на естественной характеристике. За счет того, что
на естественной характеристике. За счет того, что  всегда меньше 1. Благодаря большей жесткости характеристик в данном случае мы имеем возможность получить больший диапазон регулирования (он составляет
всегда меньше 1. Благодаря большей жесткости характеристик в данном случае мы имеем возможность получить больший диапазон регулирования (он составляет  , в отличие от
, в отличие от  при реостатном регулировании). Но это регулирование не экономичное, т.к. потери в цепи якоря значительные. Снижение угловой скорости идеального холостого хода объясняется тем, что при отсутствии тока в цепи якоря приложенное к якорю напряжение не будет равно напряжению сети, как это имело место при реостатном регулировании. В этом случае оно меньше напряжения сети на значение падения напряжения на добавочном резисторе, так как через него будет проходить ток и при отсутствии тока в якоре.
при реостатном регулировании). Но это регулирование не экономичное, т.к. потери в цепи якоря значительные. Снижение угловой скорости идеального холостого хода объясняется тем, что при отсутствии тока в цепи якоря приложенное к якорю напряжение не будет равно напряжению сети, как это имело место при реостатном регулировании. В этом случае оно меньше напряжения сети на значение падения напряжения на добавочном резисторе, так как через него будет проходить ток и при отсутствии тока в якоре.
Из сопоставления характеристик очевидны преимущества данного метода. Ту же частоту вращения  можно получить и при реостатном регулировании (характеристика 2), но при этом будет меньше жесткость характеристики и ниже стабильность регулирования. Учитывая то, что Rш и мы можем изменять, получаем два различных семейства характеристик.
можно получить и при реостатном регулировании (характеристика 2), но при этом будет меньше жесткость характеристики и ниже стабильность регулирования. Учитывая то, что Rш и мы можем изменять, получаем два различных семейства характеристик.
Первый вариант:
 .
.
В этом случае получим семейство характеристик, показанное на рис. 4.22.
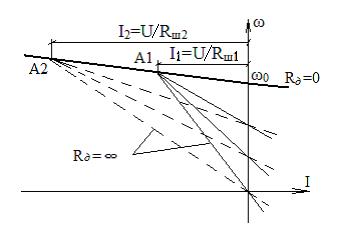
Рис. 4.22. Семейство характеристик ДПТ НВ, полученных
при 
При неизменном сопротивлении шунта изменяем добавочное сопротивление в интервале от 0 до ∞.
Точка  - точка пересечения характеристик соответствует режиму, при котором сопротивление последовательного резистора не будет влиять на ток якоря, то есть когда через последовательный резистор не будет проходить ток. Это возможно только при вращении якоря с угловой скоростью большей скорости идеального холостого хода, когда ЭДС якоря полностью уравновешивает приложенное напряжение сети и внутренние потери в цепи якоря:
- точка пересечения характеристик соответствует режиму, при котором сопротивление последовательного резистора не будет влиять на ток якоря, то есть когда через последовательный резистор не будет проходить ток. Это возможно только при вращении якоря с угловой скоростью большей скорости идеального холостого хода, когда ЭДС якоря полностью уравновешивает приложенное напряжение сети и внутренние потери в цепи якоря:
 .
.
В этом случае двигатель работает в режиме динамического торможения на внешний резистор . Поскольку напряжение на якоре равно напряжению сети, ток якоря:
 .
.
Подставим это значение тока в уравнение ЭДС и, разделив обе части на , получим:
 - скорость вращения в точке .
- скорость вращения в точке .
В предельных случаях, при неизменном и переменном , получаются две характеристики. При  мы имеем естественную характеристику двигателя. Напряжение, подводимое к якорю, не зависит от сопротивления шунтирующего резистора и не изменяется при изменении тока якоря. Другой крайний случай, когда
мы имеем естественную характеристику двигателя. Напряжение, подводимое к якорю, не зависит от сопротивления шунтирующего резистора и не изменяется при изменении тока якоря. Другой крайний случай, когда  . Это означает, что двигатель не получает питания от сети и работает в режиме динамического торможения, замыкаясь на . Характеристика в этом случае проходит через начало координат, крутизна зависит от величины . Все остальные характеристики занимают промежуточное положение. Очевидно, что, уменьшая сопротивление шунта, мы получим новое семейство более жестких характеристик, которым соответствуют все те же соотношения.
. Это означает, что двигатель не получает питания от сети и работает в режиме динамического торможения, замыкаясь на . Характеристика в этом случае проходит через начало координат, крутизна зависит от величины . Все остальные характеристики занимают промежуточное положение. Очевидно, что, уменьшая сопротивление шунта, мы получим новое семейство более жестких характеристик, которым соответствуют все те же соотношения.
Второй вариант (рис. 4.23):

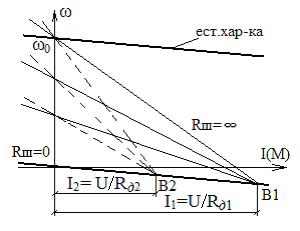
Рис. 4.23. Семейство характеристик ДПТ НВ, полученных
при 
В этом случае получим семейство механических характеристик, пересекающихся в точке  (на рис. 4.23 представлены два семейства Rд2>Rд1). Этой точке соответствует режим, возможный при некотором отрицательном значении скорости двигателя, когда его ЭДС:
(на рис. 4.23 представлены два семейства Rд2>Rд1). Этой точке соответствует режим, возможный при некотором отрицательном значении скорости двигателя, когда его ЭДС:
 .
.
Очевидно, что в этом случае сопротивление шунтирующего резистора не оказывает влияния на ток якоря. В этом случае ток не проходит через шунтирующий резистор при любом значении сопротивления, так как напряжение на зажимах якоря равно нулю. При этом двигатель потребляет ток  . Подставим значение
. Подставим значение  в уравнение ЭДС и, разделив обе части на , перейдем к частоте вращения:
в уравнение ЭДС и, разделив обе части на , перейдем к частоте вращения:
 - скорость вращения в точке .
- скорость вращения в точке .
В предельных случаях, при постоянном и изменении , получаются две характеристики. При  характеристика параллельна естественной и двигатель работает в режиме динамического торможения, характеристика проходит через начало координат. При
характеристика параллельна естественной и двигатель работает в режиме динамического торможения, характеристика проходит через начало координат. При  мы имеем реостатную характеристику, которая проходит через и точку , с включенным в цепь якоря добавочным резистором . Остальные характеристики занимают промежуточное положение. Увеличив получаем новое семейство характеристик с вершиной в точке
мы имеем реостатную характеристику, которая проходит через и точку , с включенным в цепь якоря добавочным резистором . Остальные характеристики занимают промежуточное положение. Увеличив получаем новое семейство характеристик с вершиной в точке  .
.
Как видно, характеристики при данном способе регулирования получаются более жесткими, чем при реостатном регулировании. Но продолжительное использование этого способа нежелательно, так как имеют место большие потери в цепи якоря.
Дата добавления: 2016-06-15; просмотров: 3207;
Поиск по сайту
Узнать еще
- I.3.4 ВЗАИМНЫЕ ПРЕВРАЩЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- U – образные и рабочие характеристики синхронного двигателя
- VI. Гемецеллюлозы и их превращения.
- VII. Регулирование частоты вращения двигателя
- А – изменением подводимого напряжения; б – шунтированием обмотки возбуждения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
