Построение управляющего автомата
На первом этапе курсовой работы необходимо построить операционное устройство. Но чтобы проверить правильность его работы, необходимо иметь последовательность управляющих сигналов, подаваемых на входы элементов ОУ в каждом такте. Для этого создадим модель управляющего автомата.
Выберите на панели инструментов элемент Block.  . Далее правой кнопкой мыши вызовите контекстное меню и выберите пункт Block Properties>Вкладка I/Os. Укажите наименования входов и выходов, а также их тип. Затем присоедините следующие линии связи к блоку (рисунок 47).
. Далее правой кнопкой мыши вызовите контекстное меню и выберите пункт Block Properties>Вкладка I/Os. Укажите наименования входов и выходов, а также их тип. Затем присоедините следующие линии связи к блоку (рисунок 47).
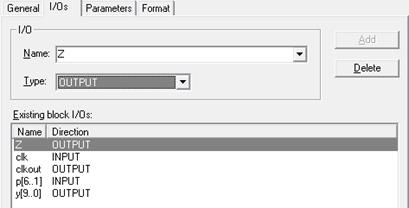
Рис. 47. Формирование сигналов блока УА

Рис. 48. Вид блока УА в Quartus (б)
Наведите курсор на “зеленые стрелочки” и кликните правой кнопкой мыши (рисунок 48). Выберите свойство Mapper Properties. На вкладке General укажите Type = INPUT или OUTPUT (в зависимости от типа сигнала). На вкладке Mappings поставьте соответствие между сигналом шины и входом блока. Нажмите Add, затем ОК. Повторите операцию для всех остальных линий связи, соединенных с данным блоком (рисунок 49).
 |
Рис. 49. Окно Mapper Properties
Выделите блок. Правой кнопкой мыши в контекстном меню выберите Create Design File from Selected Block…Укажите имя файла и его тип (рисунок 50). Нажмите ОК.
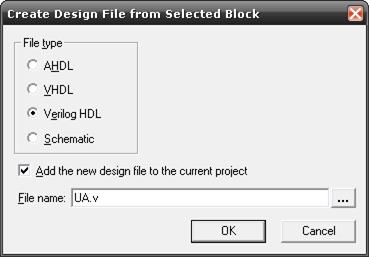
Рис. 50. Создание файла микропрограммы УА
Далее правой кнопкой мыши вызовите контекстное меню, выберите пункт Open Design File. В этом файле с помощью языка описания аппаратуры Verilog Вам предстоит написать микропрограмму работы вашего управляющего автомата.
Идея заключается в следующем. Управляющий автомат срабатывает по положительному фронту синхросигнала. Операционный автомат срабатывает по положительному фронту сигнала clkout, который выдается управляющим автоматом и является инверсией внешнего синхросигнала. Граф-схема алгоритма делится на такты. В каждом такте проверяются определенный набор условий, значения которых задают осведомительные сигналы, поступающие из ОУ. В соответствии с условиями, на выходе управляющего автомата выдаются определенная последовательность управляющих сигналов. Затем осуществляется переход к следующему такту.
Когда Вы откроете файл, то вся микропрограмма должна располагаться после строчек
// {{ALTERA_IO_BEGIN}} DO NOT REMOVE THIS LINE!
input clk;
input [6:1] p;
output clkout;
output Z;
output [9:0] y;
// {{ALTERA_IO_END}} DO NOT REMOVE THIS LINE!
//Ваша микропрограмма
endmodule
Пример микропрограммы.
integer pc=1; //Объявление счетчика тактов, переменная типа integer
reg [9:0] y; //Объявление регистра для хранения массива управляющих сигналов
wire clkout; //Объявление проводника clkout
reg Z=0; //Объявление регистра для хранения признакак окончания операции
assign clkout=!clk; //clkout является инвертированным сигналом clk, указываем, как система должна вычислять значение clkout
always @(posedge clk) //Данная функция срабатывает при положительном (pos) перепаде (edge) сигнала clk (по фронту)
begin
case (pc)
1:begin //что выполняется на первом такте
y=10'b0000000011;; //число «10» указывает на количество управляющих сигналов, «b» указывает на то, что данные бинарные, «1» указывает на то, что на этом такте УА вырабатывает данный управляющий сигнал
pc= pc + 1; //переход на след такт
end
2:begin //что выполняется на втором такте
if (p[1]==0) begin //проверка значения осведомительных сигналов «!» - символ отрицания; «&» – логическое И
y=10'b0000000100;
pc = pc + 1; end
else begin //иначе…
y=10'b1000000010;
pc=9; end //переход к такту 9
end
…
end
default y=10'b000000000; //что выполнять, если тактов больше 9
endcase;
end
endmodule
После этого, проект необходимо скомпилировать (Ctrl+L). Если ошибок не возникло, то операционный автомат готов к работе.
Прежде чем открывать схему в программе для проверки работоспособности ОА, необходимо все выводы схемы (элементы input и output) назвать соответствующим образом (это улучшит производительность и процесс исследования схемы):
x[15..0] – входные данные (размерность шины постоянна и составляет 16 разрядов);
clk или c – сигнал синхронизации;
result[15..0] – выходные данные (размерность шины постоянна и составляет 16 разрядов);
y[n..0]– управляющие сигналы (разрядность шины согласно разработанной схеме);
p[m..0]– осведомительные сигналы (разрядность шины согласно разработанной схеме);
Z – признак окончания операции;
PRS– признак ПРС;
PMR – признак ПМР;
DEL – признак деления на ноль;
RESET – сброс УА (при построении объединенной схемы).
Для того, чтобы процесс назначения выводов в программе был проще и быстрее, рекомендуется для дополнительных выводов (значения выходов сумматоров, регистров, счетчиков) задавать имена (для элементов output), оканчивающиеся словом «out» (рисунок 51).
Рис. 51. Дополнительные выводы
Дата добавления: 2022-02-05; просмотров: 488;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
