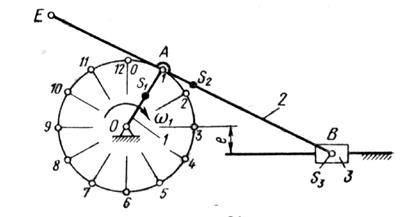
Задание №1. Схема кривошипно-ползунного механизма
| Величина | Вариант | |||||||||||
| ОА, мм | ||||||||||||
| е, мм | ||||||||||||
| АВ, мм | ||||||||||||
| АЕ, мм | ||||||||||||
 , рад/с , рад/с
|
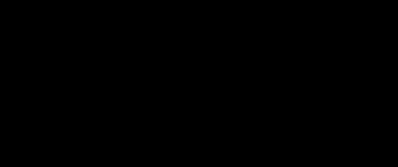
Задание №2. Схема кривошипно-ползунного механизма
| Величина | Вариант | |||||||||||
| ОА, мм | ||||||||||||
| е, мм | ||||||||||||
| АВ, мм | ||||||||||||
| АЕ, мм | ||||||||||||
| , рад/с
|
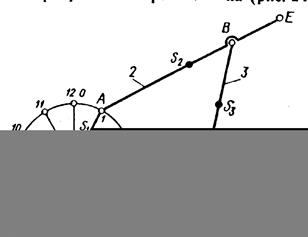
Задание №3. Схема шарнирного четырехзвенника
| Величина | Вариант | |||||||||||
| ОА, мм | ||||||||||||
| ОС, мм | ||||||||||||
| ВС, мм | ||||||||||||
| АВ, мм | ||||||||||||
| АЕ, мм | ||||||||||||
| , рад/с
|
Задание №4. Схема шарнирного четырехзвенника
| Величина | Вариант | |||||||||||
| ОА, мм | ||||||||||||
| ОС, мм | ||||||||||||
| ВС, мм | ||||||||||||
| АВ, мм | ||||||||||||
| АЕ, мм | ||||||||||||
| , рад/с
|
Контрольная работа №2
Зубчатые передачи
В зубчатом механизме, показанном на схеме, входное колесо 1 в начальный момент имеет угловую скорость w10 и постоянное угловое ускорение e1, направленное по движению или против движения. Определить:
1) передаточное отношение между входным и выходным звеньями и его знак;
2) угловую скорость и угловое ускорение выходного звена, их направления показать на схеме передачи. Угловое ускорение выходного звена можно найти, продифференцировав по времени формулу  , связывающую угловые скорости звеньев;
, связывающую угловые скорости звеньев;
3) время, в течение которого угловая скорость увеличится в два раза (если движение ускоренное) или уменьшится до нуля (если движение замедленное). Для определения времени использовать уравнение равнопеременного (  ) вращения:
) вращения:  . Для определения знака
. Для определения знака  следует сравнить направления
следует сравнить направления  и ;
и ;
4) величину и направление силы инерции и момента парысил инерции неуравновешенного входного звена 1 в начале и в конце найденного в предшествующем пункте промежутка времени, сравнить силу инерции с силой тяжести. Начертить входное колесо 1 в плане, условно изобразив венец в виде окружности, и показать направления вращения, углового ускорения и ускорения центра масс, а также силы и момента сил инерции;
5) общий коэффициент полезного действия передачи.
В таблицах заданных величин числа зубьев колес z приводятся с индексом, соответствующим их номеру на схеме механизма. Зубчатое колесо 1 имеет модуль m1. Смещение центра масс входного звена относительно оси вращения принять равным модулю 0,5m1, массу и момент инерции этого звена относительно оси вращения (приближенно учитывая зубчатое колесо, вал и полумуфту привода) определять, приняв его за цилиндр с диаметром, равным т1z1,и длиной, равной 10m1; плотность ρ=8000 кг/м3. Для расчетов принять следующие значения коэффициента полезного действия (учитывающего потери и в зацеплении и в подшипниках): для пары цилиндрических колес  ; для планетарной передачи с внешними зацеплениями ее колес
; для планетарной передачи с внешними зацеплениями ее колес  , а для имеющей внутренние зацепления
, а для имеющей внутренние зацепления  .
.
Для решения задачи нужно уметь находить планетарную передачу с ее характерными звеньями – водилом и сателлитами. По указанным направлениям угловой скорости и углового ускорения определяется характер движения (ускоренное, замедленное) и направления векторов ускорений и сил инерции. Прямые стрелки, обозначающие на схеме направления w1 и e1, следует рассматривать как проекции дуговых стрелок и относить их к направлениям на видимой (обращенной к зрителю) части вала или колеса.
ЗАДАНИЕ №1
 |
| Величина | Вариант | |||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||

| ||||||||||||
 , мм , мм
| 2,5 | 1,5 | 3,5 | 2,5 | ||||||||
 ,рад/с ,рад/с
| ||||||||||||
 , рад/с2 , рад/с2
|
 |
ЗАДАНИЕ №2
| Величина | Вариант | |||||||||||
|
| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||

| ||||||||||||

| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||
| , мм
| 2,5 | 1,5 | 2,5 | 2,5 | ||||||||
| ,рад/с
| ||||||||||||
| , рад/с2
|
ЗАДАНИЕ №3
 |
| Величина | Вариант | |||||||||||
|
| ||||||||||||
|
| ||||||||||||

| ||||||||||||
|
| ||||||||||||

| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||
| , мм
| 1,5 | 2,5 | 3,5 | 2,5 | 1,5 | |||||||
| ,рад/с
| ||||||||||||
| , рад/с2
|
ЗАДАНИЕ №4
 |
| Величина | Вариант | |||||||||||
|
| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||

| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||
|
| ||||||||||||
| , мм
| 2,5 | 1,5 | 2,5 | 1,5 | 2,5 | |||||||
| ,рад/с
| ||||||||||||
| , рад/с2
|
Рабочая программа курса
Введение.
Основные понятия, термины, цели дисциплины.
Тема 1. Структура механизмов
Структура механизмов. Классификация кинематических пар, кинематические цепи, схема механизма, число степеней свободы механизма, избыточные связи и степени свободы. Замена высших кинематических пар низшими. Структурные группы плоских рычажных механизмов.
Тема 2. Кинематика механизмов
Кинематический анализ плоских стержневых механизмов. Задачи и методы. Планы скоростей и ускорений.
Графические методы кинематического анализа. Графическое дифференцирование и интегрирование. Диаграммы перемещения, скорости и ускорения.
Тема 3. Динамика механизмов
Основные задачи динамического анализа механизмов. Силы, действующие на звенья механизма. Трение в механизмах. Силы инерции и моменты сил инерции в плоских механизмах.
Силовой анализ механизмов. Основные положения кинетостатики. Кинетостатика групп Ассура и начального звена.
Движение механизма под действием заданных сил. Режимы работы машины. КПД машин. Приведение масс и сил. Уравнения движения машины.
Неравномерность движения машины. Определение неравномерности движения и момента инерции маховика по методу Виттенбауэра.
Регулирование непериодических колебаний. Уравновешивание механизмов. Балансировка вращающихся масс.
Тема 4. Кулачковые механизмы
Общие сведения о кулачковых механизмах. Достоинства и недостатки. Классификация кулачковых механизмов.
Построение диаграммы перемещения толкателя методом обращения движения. Профильные и фазовые углы. Угол давления.
Выбор закона движения толкателя. Удары в кулачковых механизмах.
Тема 5. Зубчатые передачи
Общие сведения о зубчатых передачах. Основная теорема зацепления. Основные термины и обозначения в зубчатом зацеплении. Понятие модуля, шага, передаточного отношения, основной и делительной окружности.
Свойства эвольвенты. Методы обработки зубчатых колес: копирование и обкатка.
Кинематика зубчатых механизмов. Многозвенные зубчатые механизмы с неподвижными осями. Планетарные механизмы. Формула Виллиса. Автомобильный дифференциал.
литература
1. Артоболевский И. И. Теория механизмов и машин. – М.: Наука, 1988.
2. Теория механизмов и машин. / Под ред. К. В. Фролова. – М.: Машиностроение, 1987.
3. Теория механизмов и механика машин. / Под ред. К. В. Фролова. – М.: Высшая школа, 2001.
4. Артоболевский И. И., Эдельштейн Б. В. Сборник задача по теории механизмов и машин. – М.: Наука, 1975.
5. Попов С. А., Тимофеев Г. А. Теория механизмов и машин. – М.: Высшая школа, 1998.
6. Попов С. А. Теория механизмов и машин. – М.: Высшая школа, 1986.
Дата добавления: 2021-12-14; просмотров: 487;
Поиск по сайту
Узнать еще
- V. Схема разбора глагола
- А — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу)
- А) технологическая схема работы бетоносмесительной установки; б) блок дозирования каменных материалов; в) смесительный блок
- Адитивний синтез кольору, схема синтезу, рівняння кольору, його аналіз
- Алгоритм проектирования кулачкового механизма по допустимому углу давления
- АНАЛИЗ МЕХАНИЗМА ЦЕНООБРАЗОВАНИЯ.
- Анализ требований к техническим характеристикам ПМИОЭРЛ, определенных техническим заданием на ОКР
- Б) схема оси развития, модифицированная в соответствии с представлениями структурной психосоматики -глубинные зоны перенесены к началу координат.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
