Классификация кинематических пар
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Уфа 2008
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Уфимский государственный авиационный
технический университет
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Допущено редакционно-издательским советом УГАТУ
в качестве учебного пособия для студентов всех форм
обучения, обучающихся по направлению 150200
«Машиностроительные технологии и оборудование»
Уфа 2008
УДК 621.833 (07)
ББК 34.444 (я7)
Т33
Рецензенты: доктор техн. наук, проф. Ковган С.Г.
доктор техн. наук, проф. Набиев Т.С.
Т33 Теория механизмов и машин: Учебное пособие / Уфимск. гос. авиац. техн. ун-т. Б.И.Гурьев, Л.С.Кутушева, Л.Л.Русак, А.Я.Садыкова, Р.Ш.Хабибуллина. – Уфа, 2008. –114 с.
ISBN 978-5-86911-757-1
Пособие соответствует дисциплине (курсу) Теория механизмов и машин.
Работа содержит достаточно подробное изложение курса лекций по теории механизмов и машин, по разделам: структурный анализ механизмов, кинематический анализ рычажных и зубчатых механизмов, силовой анализ рычажных механизмов, геометрия зубчатых передач. Кроме того, в каждом из разделов приведены типовые задачи, которые студенты могут использовать при подготовке к экзамену.
Учебное пособие предназначено для студентов механических специальностей.
Ил. 149. Библ.: 6 назв.
ISBN 978-5-86911-757-1
©Уфимский государственный авиационный технический университет, 2008
| Содержание | |
| Введение | |
| 1. Структурный анализ механизмов. строение и классификация плоских механизмов | |
| 1.1. Классификация кинематических пар | |
| 1.2. Классификация кинематических цепей | |
| 1.3. Структурная формула плоского механизма | |
| 1.4. Замена высших кинематических пар низшими | |
| 1.5. ма по рис. 1.8, а, можно у с соответствующими кинематическими парами; при этом Классификация плоских механизмов по Л. В. Ассуру | |
| 1.6. Порядок структурного исследования плоского механизма | |
| Вопросы для самопроверки | |
| Задачи | |
| 2. кинематический анализ плоских рычажных механизмов | |
| Теоретические основы метода планов скоростей и ускорений | |
| Вопросы для самопроверки | |
| Задачи | |
| 3. Кинематический анализ зубчатых механизмов | |
| 3.1. Кинематика рядовых механизмов | |
| 3.2. Кинематика планетарных и дифференциальных механизмов | |
| 3.3. Кинематика комбинированных механизмов с последовательным соединением ступеней | |
| 3.4. Кинематика замкнутых механизмов | |
| 3.5. Синтез зубчатых механизмов. Особенности синтеза соосных механизмов | |
| Вопросы для самопроверки | |
| Задачи | |
| 4. Силовой анализ плоских рычажных механизмов | |
| 4.1. Характеристики реакций в кинематических парах | |
| 4.2. Условие разрешимости задачи силового анализа плоского механизма | |
| 4.3. Порядок силового анализа механизма | |
| 4.4. Методы силового анализа | |
| 4.5. Кинетостатика структурных групп II класса | |
| 4.6. Кинетостатика начального звена | |
| 4.7. Определение уравновешивающих сил и моментов методом Н. Е. Жуковского | |
| 4.8. Определение уравновешивающих сил и моментов методом, основанным на применении принципа возможных перемещений | |
| Вопросы для самопроверки | |
| Задачи | |
| 5. Геометрия зубчатых колес и передач | |
| 5.1. Основной закон зацепления. Сопряженные профили | |
| 5.2. Эвольвента окружности, ее уравнение и свойства | |
| 5.3. Свойства эвольвентного зацепления | |
| 5.4. Исходный контур. Исходный производящий контур | |
| 5.5. Параметры зубчатого колеса, получаемые при нарезании зубьев | |
| 5.6. Параметры зацепления, составленного из эвольвентных колес, нарезанных со смещением исходного контура | |
| 5.7. Последовательность проектирования эвольвентной зубчатой передачи, составленной из колес, нарезанных стандартным реечным инструментом | |
| 5.8. Проверка качества зацепления по геометрическим показателям | |
| 5.9. Выбор коэффициентов смещения с помощью блокирующих контуров | |
| 5.10. Размеры для контроля взаимного положения разноименных профилей зубьев (измерительные размеры) | |
| Вопросы для самопроверки | |
| Задачи | |
| Список литературы | |
ВВЕДЕНИЕ
Дисциплина "Теория механизмов и машин" относится к циклу общепрофессиональных дисциплин.
При изучении курса "Теория механизмов и машин" (ТММ) студент получает основополагающие сведения о механизмах – об их многообразии, основных типах и о возможности их использования в различных машинах; изучает основные методы анализа и синтеза механизмов, применяемых в разнообразных машинах и устройствах; учится привлекать ЭВМ для рационального проектирования механизмов и оптимизации их параметров.
Этот курс лежит в основе конструкторских разделов большинства специальных дисциплин, освоение которых без знания основ теории механизмов и машин невозможно или затруднительно.
Умение самостоятельно и грамотно решать задачи – это важнейшие навыки, приобретаемые студентами, изучающими ту или иную техническую дисциплину.
Настоящее пособие является одновременно конспектом лекций и сборником типовых задач, используемых кафедрой ОКМиМ УГАТУ в течение ряда последних лет при письменных экзаменах по ТММ.
Сборник содержит задачи по следующим разделам курса:
· структурный анализ механизмов; строение и классификация плоских механизмовструктура и классификация плоских механизмов;
· кинематический анализ плоских рычажных механизмов;
· кинематический анализ зубчатых механизмов;
· силовой анализ плоских рычажных механизмов;
· геометрия зубчатых колес и передач.
Основная масса задач составлена авторами настоящего пособия, кинематические схемы некоторых механизмов и содержание отдельных задач позаимствованы из других подобных источников.
В начале каждого раздела приведены достаточно полные теоретические сведения, используемые при решении соответствующих задач и представляющие собой конспект лекций.
Авторы решили воздержаться от приведения примеров решений задач, поскольку достаточно большое их количество опубликовано в изданных ранее задачниках и методических указаниях.
1. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ.
СТРОЕНИЕ И КЛАССИФИКАЦИЯ ПЛОСКИХ МЕХАНИЗМОВ
Механизм – система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел (в теории механизмов и машин под твердыми телами понимают как абсолютно твердые, так и деформируемые, и гибкие тела).
Звено – твердое тело, входящее в состав механизма; звено может состоять из нескольких деталей, не имеющих между собой относительного движения.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элемент кинематическая пары – совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару.
Классификация кинематических пар
Кинематические пары различают и классифицируют по различным признакам.
1) По числу связей, налагаемых на относительное движение звеньев.
Всякое свободно движущееся в пространстве абсолютно твердое тело обладает шестью степенями свободы или шестью видами независимых возможных движений. Вхождение двух звеньев в кинематическую пару налагает на их относительное движение некоторые ограничения или условия связи; класс кинематической пары (номер класса совпадает с числом условий связи S) всегда находится в пределах от 1 до 5, число оставшихся подвижностей H дополняет число связей до шести, т.е.  , поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.
, поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.
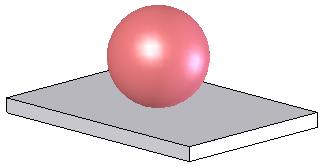
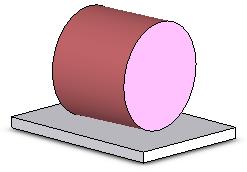
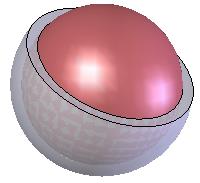
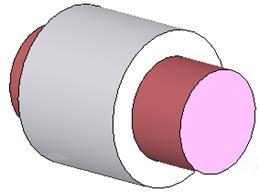
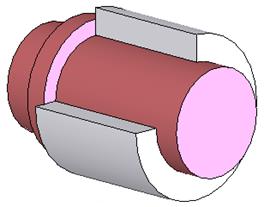
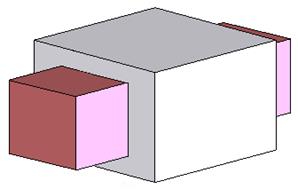
На рис. 1.1 представлены примеры кинематических пар 1 – 5 классов.
2) По характеру контакта звеньев различают пары низшие (требуемое относительное движение звеньев можно получить постоянным соприкасанием их элементов по поверхности) и высшие (требуемое относительное движение можно получить только соприкасанием их элементов по линиям и в точках). Например, трехподвижная пара по
рис. 1.1, в – низшая, а четырехподвижная по рис. 1.1, б – высшая.
3) По области относительного движения звеньев пары могут быть плоскими (траектории всех точек в относительном движении звеньев – плоские кривые, расположенные в параллельных плоскостях) и пространственными.
Плоская одноподвижная пара может быть либо вращательной (шарниром – рис. 1.1, д), либо поступательной (рис. 1.1, е); пространственная пара может быть, например, винтовой (одноподвижная), цилиндрической (двухподвижная), сферической (двух- и трехподвижная) и т.д.
Механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары, называют рычажным.
| 
| ||
| а – пятиподвижная пара (1 класс) | б – четырехподвижная пара (2 класс) | ||
| 
| ||
| в – трехподвижная пара (3 класс) | г – двухподвижная пара (4 класс) | ||
| 
| ||
| д – одноподвижная вращательная пара (5 класс) | е – одноподвижная поступательная пара (5 класс) | ||
| Рис. 1.1 | |||
Виды звеньев(рис. 1.2 и рис. 1.3):
 Рис. 1.2
Рис. 1.2
|
стойка – звено, принимаемое за неподвижное; такое звено в механизме может быть только одно;
кривошип – вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси;
коромысло – вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси;
шатун – звено рычажного механизма, образующее кинематические пары только с подвижными звеньями;
|
| Рис. 1.3 |
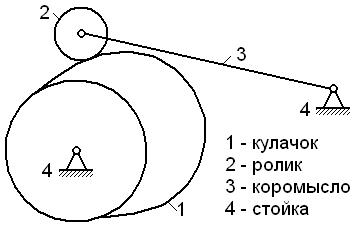
кулиса – звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару; в зависимости от степени протяженности элемента поступательной пары различают «камень» (звено меньшей протяженности) и «направляющую»;
ползун – звено рычажного механизма, образующее поступательную пару со стойкой;
кулачок – звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны;
зубчатое колесо – звено с замкнутой системой зубьев, обеспечивающее непрерывное движение другого зубчатого колеса или рейки.
Систему звеньев, связанных между собой кинематическими парами, называют кинематической цепью.
Дата добавления: 2021-12-14; просмотров: 475;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- II Классификация САSЕ-средств
- II. Классификация документов
- II. Психологические приемы влияния на партнера.
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
