Гистерезисный двигатель
Гистерезисный микродвигатель — это синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора.
Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса), насаженный на втулку из обычной стали (рис. 5.4,о). С целью удешевления ротор иногда делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка.
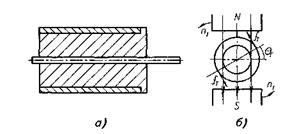
Рис. 5.4. Устройство ротора гистерезисного двигателя (а) и схема, иллюстрирующая возникновение гистерезисного момента (б)
В гистерезисном двигателе ротор, находящийся в магнитном поле статора, превращается под воздействием поля в постоянный магнит и поэтому вращается с синхронной скоростью. Ось намагничивания ротора из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол ƟГ гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fTсил взаимодействия между полюсами ротора и потоком статора (рис. 5.4,6).
|
|
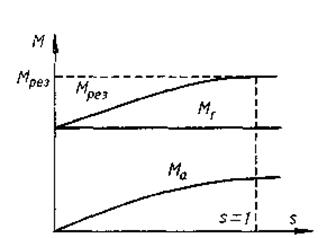
Рис. 5.5. Зависимость моментов гистерезисного двигателя от скольжения
Величина силы fT и создаваемый ею гистерезисный момент МГ не зависят от скорости вращения (скольжения) (рис. 5.5).
Гистерезисный момент определяются шириной петли гистерезиса ферромагнитного материала.
Если нагрузочный момент больше МГ, то двигатель перейдет в асинхронный режим работы, т. е. появится дополнительный асинхронный момент Ма. Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Поскольку ротор имеет большое активное сопротивление, то характеристика Ma=f(s)практически линейна и асинхронный гистерезисный момент максимален при s = 1. Таким образом, на валу гистерезисного момента в общем случае действует результирующий момент, который складывается из гистерезисного и асинхронного моментов:
 . (5.9)
. (5.9)
Момент при асинхронном режиме пропорционален потерям в роторе, деленным на скольжение. Потери в роторе включают потери на гистерезис ΔРГ и на вихревые токи ΔРвихр. Поэтому асинхронный момент равен:
 (5.10)
(5.10)
гистерезисный момент:
 1)
1)
где Δ PГ н — потери на перемагничивание ротора при неподвижном роторе; ΔРвихр н — потери на вихревые токи при неподвижном роторе.
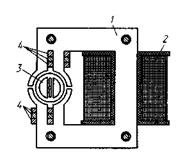
К гистерезисным двигателям относится синхронный микродвигатель с экранированными полюсами (рис. 5.6). Двигатель имеет явнополюсный статор 1 с однофазной обмоткой 2.
|
| Рис. 5.6. Синхронный микродвигатель с экранированными полюсами |
На полюсах статора находятся короткозамкнутые экранирующие витки 4, охватывающие половину полюса, которые создают сдвиг по фазе между магнитными потоками, проходящими через экранированную и неэкранированную части полюсов.
Ротор 3 собирают из нескольких плоских колец из магнитотвердого материала. Кольца имеют диаметральные перемычки. Кольцевой обод ротора обеспечивает появление гистерезисного и асинхронного моментов, а диаметральная перемычка — реактивный момент. При пуске действуют асинхронный и гистерезисный моменты, при синхронной скорости — гистерезисный и реактивный.
Гистерезисные двигатели могут работать как в асинхронном, так и в синхронном режиме. Однако, в асинхронном режиме КПД гистерезисного двигателя резко уменьшается, поскольку существенно возрастают потери мощности на перемагничивание ротора, которые зависят от квадрата скольжения.
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: повышенная стоимость, склонность к качаниям при резких изменениях нагрузки, низкий коэффициент мощности (cosφ = 0,4...0,5).
Гистерезисные двигатели выпускаются на мощность до 2000 Вт, при номинальных 50, 400 и 500 Гц.
Дата добавления: 2021-12-14; просмотров: 811;
Поиск по сайту
Узнать еще
- F82 Специфическое расстройство развития двигательных функций
- I. ДВИГАТЕЛЬНАЯ СФЕРА
- Iт – обратный тяговый ток; М – тяговый двигатель электропоезда.
- АНАЛИЗ ДВИГАТЕЛЬНЫХ НАВЫКОВ И УМЕНИЙ
- Антропометрические и масс-инерционные характеристики тела человека. Динамика опорно-двигательного аппарата (ОДА)
- АРОМАТЕРАПЕВТИЧЕСКИЙ МАССАЖ ПРИ ЗАБОЛЕВАНИЯХ И ТРАВМАХ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА
- Асинхронные электродвигатель серии N 560 Y2 мощностью 2500 кВт
- Асинхронный двигатель

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
