Синхронные микродвигатели с постоянными магнитами или с активным ротором
Отличие синхронного микродвигателя с активным ротором от прочих заключается в том, что на его роторе тем или иным образом расположены блоки постоянных магнитов. Их изготовляют из магнитотвердых сплавов из кобальта, алюминия, никеля, железа, обладающих большой коэрцитивной силой. Блоки постоянных магнитов могут быть расположены на роторе радиально или аксиально.
В радиальной конструкции блок постоянных магнитов 1 насаживается непосредственно на вал ротора 4. Пакет стали ротора 3 выполнен в виде кольца, напрессованного на блок постоянных магнитов (рис. 5.1,о).
В пакете стали имеются прорези, разделяющие полюсы разной полярности. В пазах пакета стали ротора располагаются стержни 2 короткозамкнутой обмотки типа «беличья клетка». Эта обмотка играет роль пусковой обмотки.
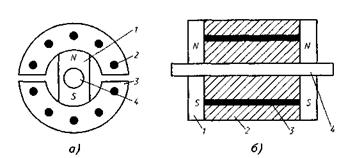
Рис. 5.1. Расположение постоянных магнитов на роторе: а — радиальное; b — аксиальное
В аксиальной конструкции кольцевой пакет стали 2 насаживается непосредственно на вал ротора 4. По краям пакета с торцевых сторон устанавливается один или два блока постоянных магнитов 1, выполненных в виде дисков (рис. 5.1,6). В пазах пакета ротора, как и в предыдущем случае, уложены стержни короткозамкнутой обмотки 3.
Основное комплексное уравнение синхронного микродвигателя:
Ů=İ1R1 – Ė (5.1)
где Ů — напряжение на фазе статора; İ1 — ток в фазе статора; R1— активное сопротивление фазы статора; Ė — ЭДС, индуктируемая рабочим потоком машины в фазе статора.
Результирующий поток машины в установившемся режиме работы складывается из вращающихся синхронно потока статора Ф0 и потока полюсов ротора Ф0. Поэтому ЭДС Е0 можно представить в виде суммы векторов: Ė= Ė1+ Ė0, где Ė — ЭДС, наводимая в фазе статора вращающимся магнитным потоком статора Ф1; Ė0— ЭДС, наводимая в фазе статора вращающимся потоком полюсов ротора Ф0. Поэтому (5.1) имеет вид:
Ů1= İ1R1 – Ė – Ė0 (5.2)
Действующее значение этой ЭДС определяется формулой:
E0=4,44w1f1Kоб1Ф2 (5.3)
где w1— число витков фазы статора; Kоб1 — обмоточный коэффициент фазы; f1— частота питающей сети.
ЭДС самоиндукции E1, пропорциональна току в фазе статора и индуктивному сопротивлению фазы машины или синхронному сопротивлению X1:
Ė1= - j İ1 X1.
Электромагнитный момент машины образуется в результате взаимодействия потокаполюсов ротора с активной составляющей тока в фазах статора:
МЭМ= СM Ф2I1акт = СM Ф2I1 cosφ1, (5.4)
где I1 cosφ1— активная составляющая в фазе статора; φ1— угол сдвига между векторами тока и напряжения в фазе.
Процессы при работе синхронного микродвигателя аналогичны процессам в обычной синхронной машине. В режиме холостого хода ось потока полюсов ротора совпадает с осью вращающегося потока статора, и угол нагрузки  =0. Ток в фазе является практически реактивным, и электромагнитный момент машины МЭМ = 0.
=0. Ток в фазе является практически реактивным, и электромагнитный момент машины МЭМ = 0.
При появлении нагрузки на валу машины ротор двигателя смещается относительно оси потока статора на некоторый угол , т. е. вектор ЭДС Ė0 будет отставать от вектора напряжения на угол . Векторная диаграмма синхронного микродвигателя аналогична диаграмме обычного двигателя. При росте нагрузки возрастают значение cosφ1, активная составляющая тока в фазе статора I1акт и электромагнитный момент машины МЭМ, стремящийся вернуть ротор в прежнее положение. Режим установится, когда электромагнитный момент машины уравновесит момент нагрузки на ее валу. Таким образом, всякое увеличение момента нагрузки на валу машины и, следовательно, полезной мощности на валу сопровождается увеличением активной мощности, потребляемой двигателем от сети.
Для двигателя с ротором аксиальной конструкции величина электромагнитного момента определяется выражением
 (5.5)
(5.5)
гдеm, — число фаз обмотки статора;ω1= 2πf1/p — угловая частота поля.
Угловая характеристика микромашины с аксиальной конструкцией ротора имеет вид синусоиды, как у обычного синхронного неявнополюсного двигателя. Максимум электромагнитного момента имеет место при угле = 90°.
Угловая характеристика имеет важное значение для оценки статической устойчивости двигателя. Под статической устойчивостью понимается способность двигателя сохранять синхронную скорость вращения при изменении момента нагрузки на валу. Для обеспечения устойчивости работы необходимо, чтобы с ростом момента нагрузки, и, следовательно, угла 9 возрастал бы электромагнитный момент МЭМ развиваемый машиной. Условием устойчивости работы является условие

Как и для обычной синхронной машины, это условие выполняется для микродвигателя лишь в диапазоне углов | | < 90°. При больших углах машина выпадает из синхронизма, либо останавливается. При номинальной нагрузке обычно Ɵ =(20...30)°.
Для двигателя с радиальной конструкцией ротора сопротивление магнитному потоку фазы зависит от углового положения ротора относительно геометрической оси фазной катушки. В этом случае электромагнитный момент, развиваемый машиной можно представить в виде суммы двух составляющих
 ,(5.6)
,(5.6)
где  — основная составляющая, обусловленная взаимодействием потока ротора с активной составляющей тока в фазах статора;
— основная составляющая, обусловленная взаимодействием потока ротора с активной составляющей тока в фазах статора;  — реактивный момент, обусловленный стремлением ротора ориентироваться по оси результирующего поля машины.
— реактивный момент, обусловленный стремлением ротора ориентироваться по оси результирующего поля машины.
Для двигателей с радикальной конструкцией ротора величина реактивного момента зависит от угла 0 и от разницы синхронных сопротивлений по продольной и поперечной осям
 (5.7)
(5.7)
Из-за наличия реактивного момента результирующая зависимость MЭМ(Ɵ)для синхронного микродвигателя с радиальной конструкцией ротора отлична от синусоиды и аналогична угловой характеристике синхронного явнополюсного двигателя.
Для двигателя с аксиальной конструкцией ротора величина реактивного сопротивления фазы статора практически не зависит от углового положения ротора относительно геометрической оси фазы, т. е. сопротивление магнитному потоку фазы не зависит от углового положения ротора.
Дата добавления: 2021-12-14; просмотров: 647;
Поиск по сайту
Узнать еще
- ATA/133 (Parallel ATA, UltraDMA/133 или E-IDE)
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- F45.38 другие органы или системы
- F52 Половая дисфункция, не обусловленная органическим расстройством или заболеванием
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- I2C (Inter-Integrated Circuit) или двухпроводный интерфейс
- II триместр беременности (период системогенеза, или средний плодный)
- II. НЕДИСКРЕЦИОННАЯ ФИСКАЛЬНАЯ ПОЛИТИКА. ВСТРОЕННЫЕ СТАБИЛИЗАТОРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
