Лекция Основные принципы функционирования спутниковых навигационных систем
КОСМИЧЕСКИЙ СЕГМЕНТ
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника - формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
НАЗЕМНЫЙ СЕГМЕНТ
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
ПОЛЬЗОВАТЕЛЬСКИЙ СЕГМЕНТ
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
ПРИНЦИП РАБОТЫ СИСТЕМЫ НАВИГАЦИИ
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один - смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
СИСТЕМЫ КООРДИНАТ
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат - системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Навигационная система | Система координат |
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
СИСТЕМЫ ВРЕМЕНИ
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
НАВИГАЦИОННЫХ РАДИОСИГНАЛЫ
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки) сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того, чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
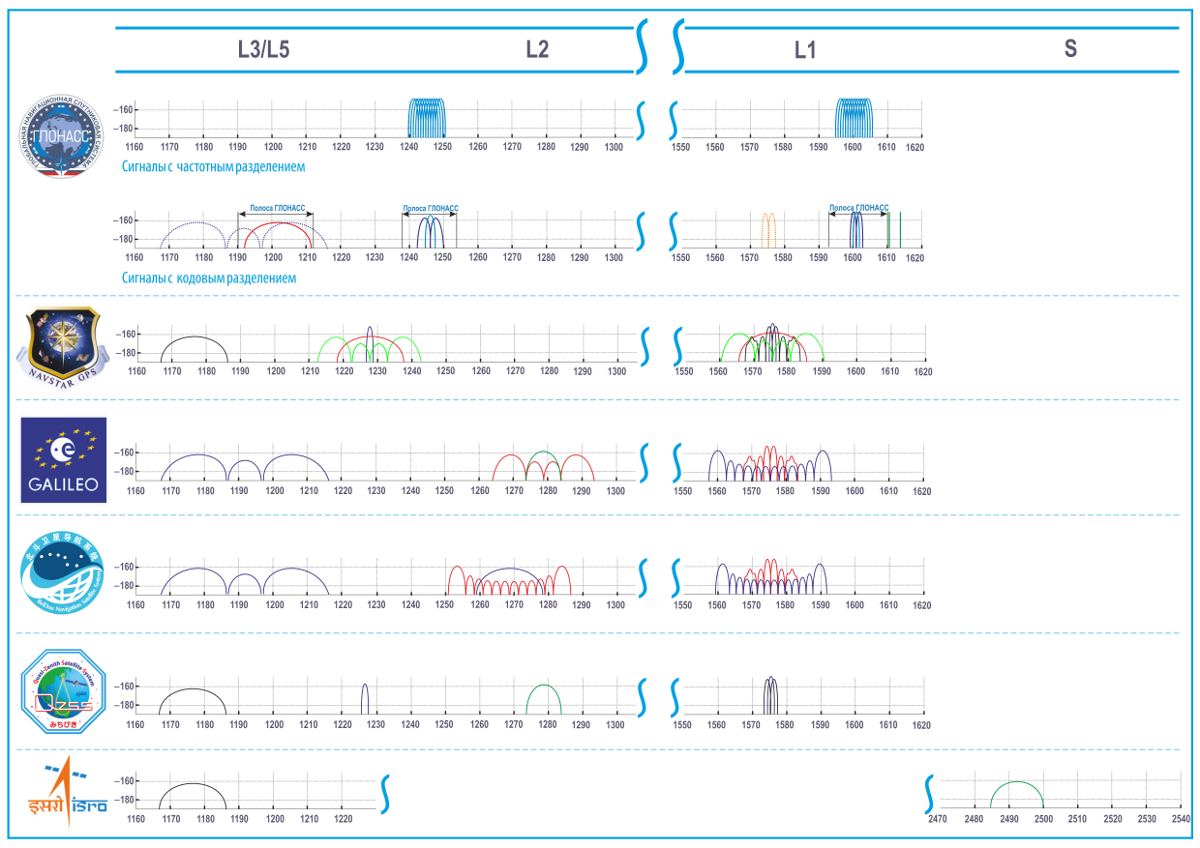
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
ДИАПАЗОНЫ, ЗАНИМАЕМЫЕ РАЗЛИЧНЫМИ НАВИГАЦИОННЫМИ СПУТНИКОВЫМИ СИСТЕМАМИ
ВИДЫ МОДУЛЯЦИИ
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов.
В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной) фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций, получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
НАВИГАЦИОННОЕ СООБЩЕНИЕ
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения. Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
ТИПЫ ИНФОРМАЦИИ НАВИГАЦИОННОГО СООБЩЕНИЯ
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ). Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров, суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк.
В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением. В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура. В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов. Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных. Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается, что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и, следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
ФАКТОРЫ, ВЛИЯЮЩИЕ НА СНИЖЕНИЕ ТОЧНОСТИ
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
1. Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.
2. Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
3. Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.
Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и потребителя.
Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP - Geometrical delusion of precision.
Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп - геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.
Соответствует PDOP - Position delusion of precision. - Гг - геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.
Соответствует HDOP - Horizontal delusion of precision. - Гв - геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.
Соответствует VDOP - Vertical delusion of precision. - Гт - геометрический фактор точности определения поправки показаний часов потребителя ГНСС.
Соответствует TDOP - Time delusion of precision.
ПОВЫШЕНИЕ ТОЧНОСТИ НАВИГАЦИИ
Существующие в настоящее время глобальные навигационные спутниковые системы (ГНСС) GPS и ГЛОНАСС позволяют удовлетворить потребности в навигационном обслуживании обширный круг потребителей. Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Классическим методом повышения точности навигационных определений является использование дифференциального (относительного) режима определений.
Дифференциальный режим предполагает использование одного или более базовых приёмников, размещённых в точках с известными координатами, которые одновременно с приёмником потребителя (подвижным, или мобильным) осуществляют приём сигналов одних и тех же спутников.
Повышение точности навигационных определений достигается за счёт того, что ошибки измерения навигационных параметров потребительского и базовых приёмников являются коррелированными. При формировании разностей измеряемых параметров большая часть таких погрешностей компенсируется.
В основе дифференциального метода лежит знание координат опорной точки – контрольно-корректирующей станции (ККС) или системы опорных станций, относительно которых могут быть вычислены поправки к определению псевдодальностей до навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть повышена в десятки раз.
Дата добавления: 2018-05-10; просмотров: 3338;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
