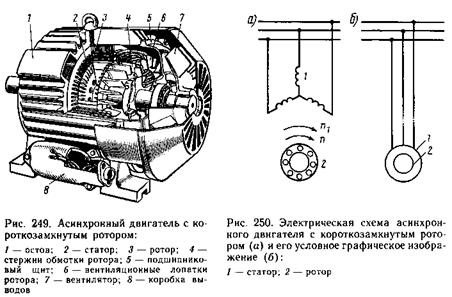
Асинхронный двигатель.
Принцип действия основан на использовании вращающегося магнитного поля, создаваемого обмоткой статора.
 В зависимости от количества обмоток статора асинхронные двигатели бывают:
В зависимости от количества обмоток статора асинхронные двигатели бывают:
- Однополюсные (P=1 – 3 обмотки)
- Двухполюсные (Р=2 – 6 обмоток)
- Трехполюсные (Р=3 – 9 обмоток) и т.д.
Частота вращения поля статора nст зависит от полюсности двигателя (Р), и частоты тока f, т.е у однополюсного двигателя:
nст=60f/P=> т.е. nст = 60*50/2=3000 об\мин.
У двухполюстного nст =60*50/2=1500 об\мин.
У трехполюстного nст = 60*50/3=1000 об\мин.
Вращающееся поле статора пересекает обмотку ротора, обычно короткозамкнутую, возникает явление электромагнитной индукции. В роторе индуцируется ЭДС и вихревые токи, которые взаимодействуют с полем статора и образуют выталкивающие силы и вращающий момент. Ротор начинает, крутится, догоняя поле статора.
Необходимым условием работы асинхронного двигателя является разница частот вращения ротора и поля статора.
nр≠nст и nр < nст
Важнейший параметр работы асинхронного двигателя, характеризующий отставание ротора от поля статора называется – скольжением (S)
S= (nст -np)/ nст *100%
В номинальном режиме S=5%, то есть у однополюсного двигателя np=2800-2880 об/мин,
у двухполюсного - np=1400-1440 об/мин,
у трехполюсного - np=960 об/мин
При увеличении нагрузки на асинхронный двигатель частота вращения ротора падает, а скольжение растет, при этом растет и вращающий момент (тяга), но нельзя допускать роста скольжения более Sкрит=10-20% т.к. вращающий момент резко падает, ротор останавливается и горит обмотка статора.
Асинхронные двигатели, работающие с начальной нагрузкой (тяговые, крановые, лифтовые) имеют фазный ротор, который в момент пуска (4-6 секунд) получает дополнительное питание через 3 контактных кольца.
Преимущество асинхронных двигателей:
- Из-за отсутствия коллектора нет проблем с коммутацией и искрением под щетками.
- Возможность регулировки мощности с помощью схемы «звезда» и «треугольник».
- Отсутствие изоляции в короткозамкнутых роторах
- Возможность питания от двух или одной фазы.
Недостатки:
1.частотная регулировка скорости, что требует дополнительного электронного (тиристорного) оборудования.
2.более низкий КПД и перегрузка питающей цепи.
Р=U*I*cosφ (cosφ=0.7)
VI Раздел
Дата добавления: 2017-11-21; просмотров: 3156;
Поиск по сайту
Узнать еще
- Автоматизированный асинхронный электропривод с использованием синхронных электромашинных преобразователей частоты.
- Асинхронный 3-х разрядный
- Асинхронный RS-тpиггеp, реализация на базовых логических элементах И-НЕ,ИЛИ-HЕ. RS-тpиггеp для подавления дребезга контактов.
- Асинхронный RS-триггер на элементах ИЛИ-НЕ
- Асинхронный двигатель АЭ92-4/02.
- Асинхронный двигатель.
- Асинхронный двигатель. Устройство и условное обозначение на схемах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
