Указания к выполнению лабораторной работы
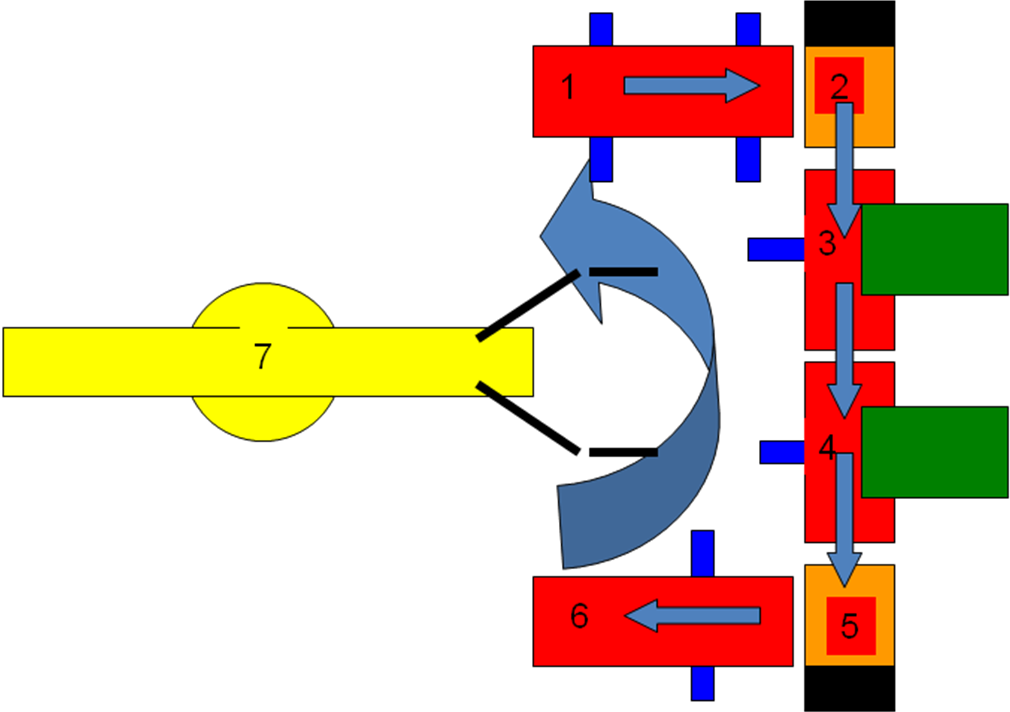
Рис. 5.1. Схема макета поточной линии
Объекты управления
1. Поточная линия
• 4 конвейерные секции (поз. 1, 3, 4, 6 рис. 5.1), обеспечивающие перемещение детали;
• 2 толкателя (шибера) (поз. 2, 5 рис. 5.1)служащие для изменения направление движения;
• 2 рабочие станции (сверлильная и фрезерная) (поз. 8, 9 рис. 5.1) подачи делили на станки и имитация их обработки;
2. Трехосевой робот (поз 7 рис. 5.1) служит для замыкания рабочего цикла. Выполняет следующие виды перемещений:
• поворот на 180°
• вертикальное перемещение
• горизонтальное перемещение.
Для манипулирования деталями оснащен механическим схватом.
Датчики
• Концевые выключатели: сухой контакт (рис. 5.2)
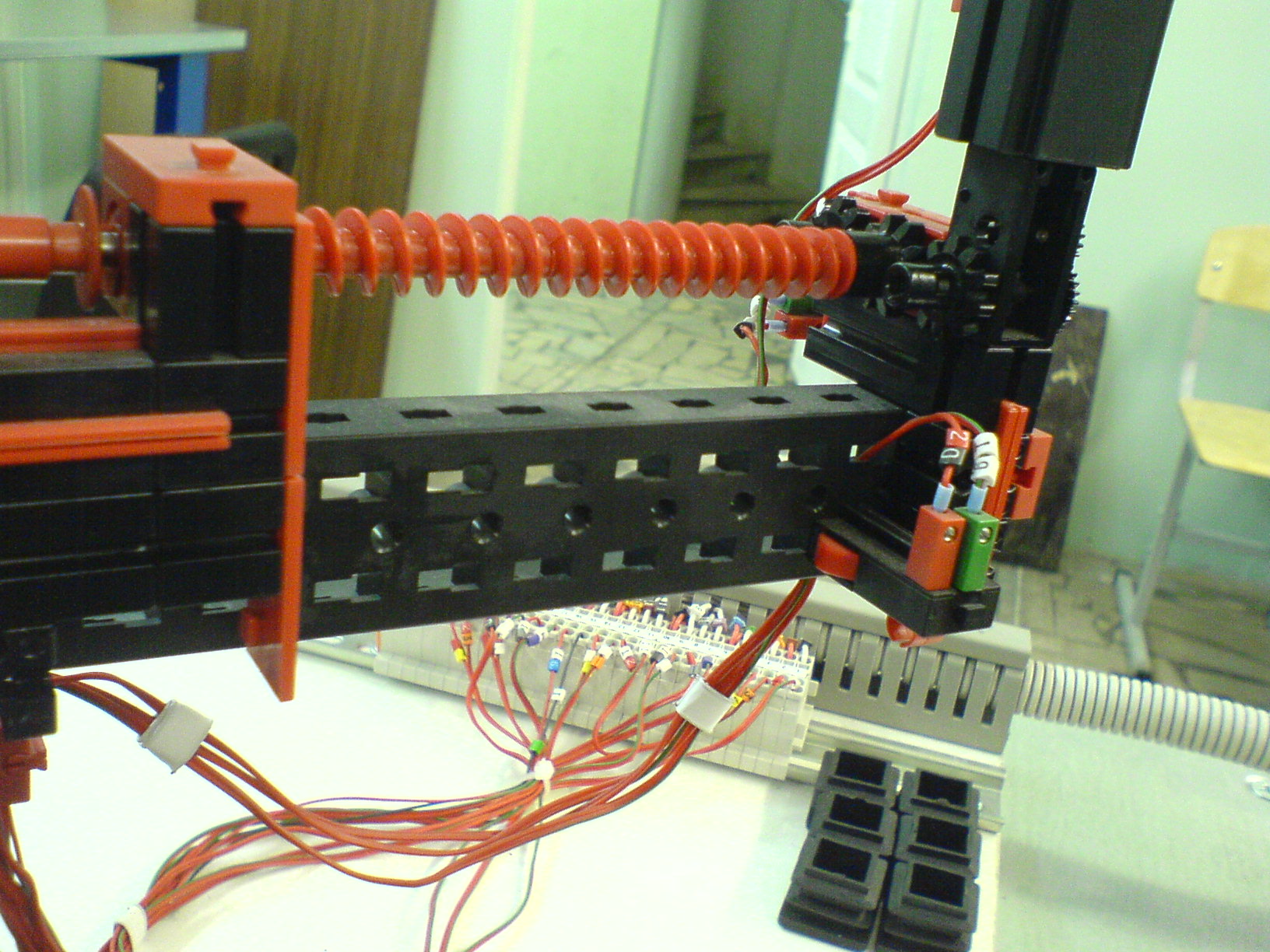
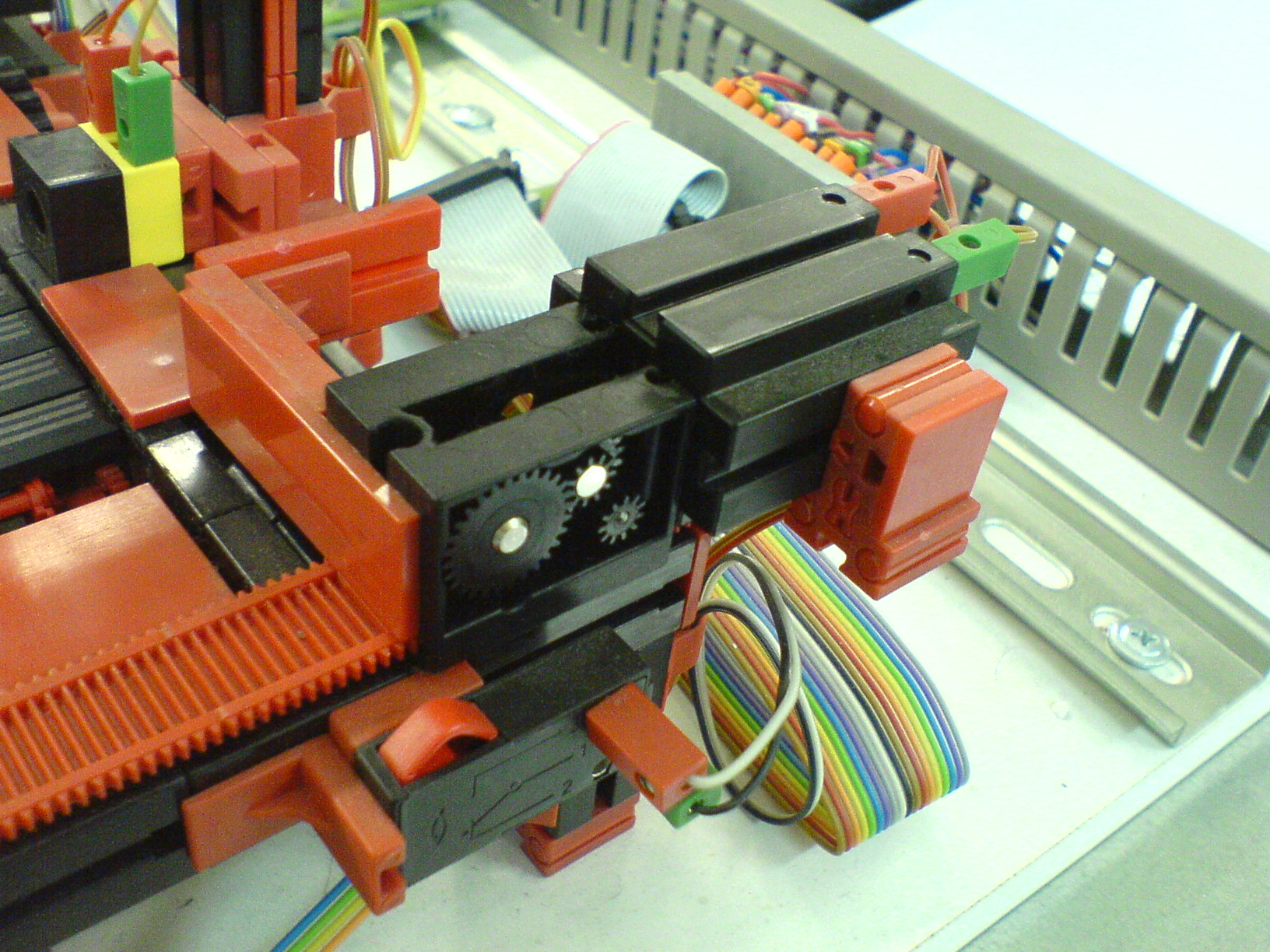
Рис. 5.2. Конечные выключатели
а) робота, б) шибера
• Счетчики оборотов: сухой контакт (рис. 5.3)
Рис. 5.3. Счетчик оборотов
• Присутствие детали: лампа накаливания +фототранзистор (рис. 5.4)


Рис. 5.4. Оптико-электронный барьерный датчик
а) загрузочная станция, б) рабочая станция
| б) |
| б) |
| а) |
Приводятся в действие двигателями постоянного тока с возбуждением от постоянных магнитов:
• Конвейер: напряжение питания – 12В, режим работы – нереверсивный (рис. 5.5.а);
• Имитаторы станков: напряжение питания – 12В, режим работы – нереверсивный (рис. 5.5.б);
| а) |
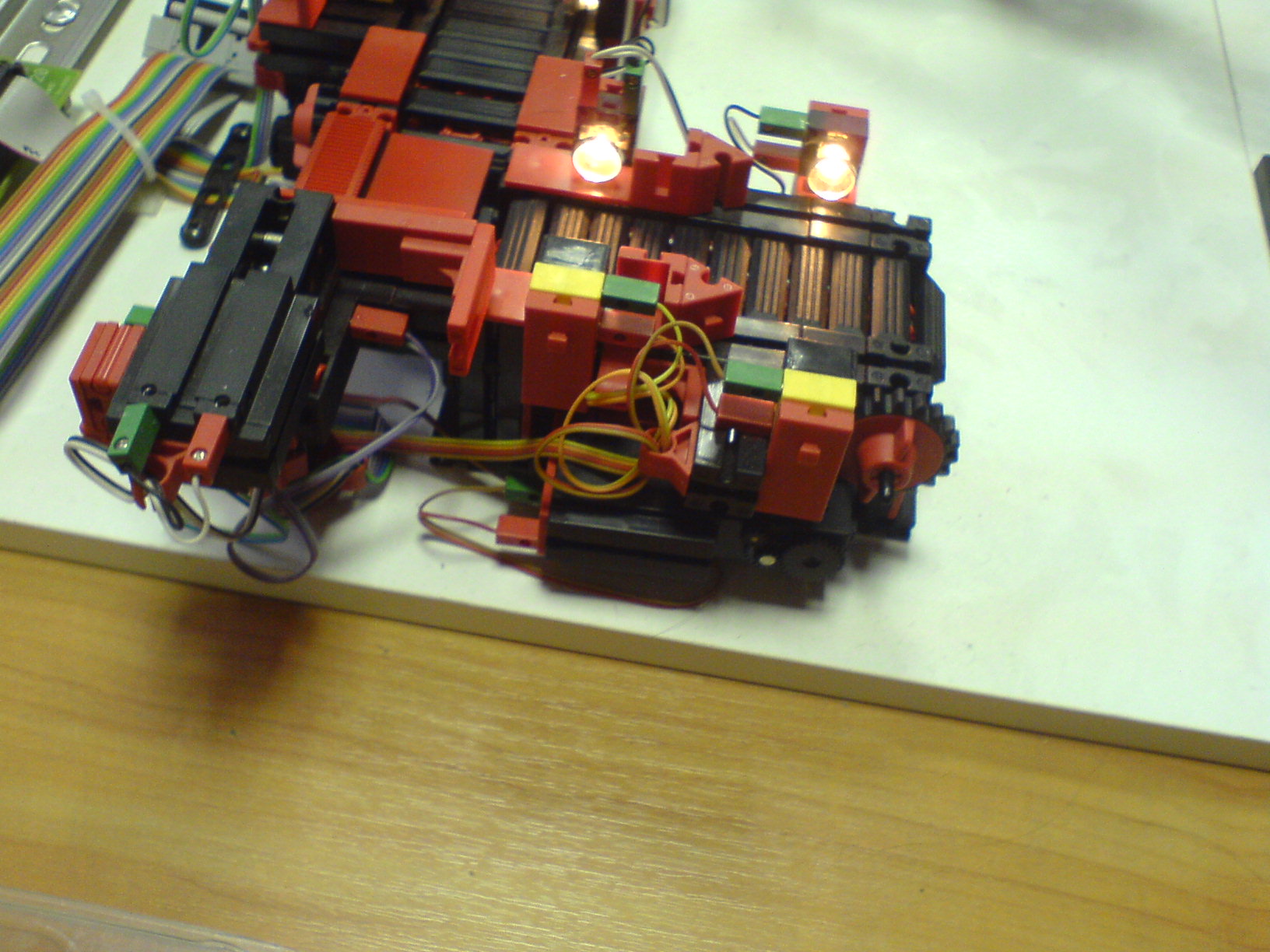
Рис. 5.5. Приводы: а) конвейера, б) имитатора станка
• Шибер (рис. 5.6): напряжение питания – -12В, режим работы – реверсивный (рис. 5.6);
Рис. 5.6. Привод шибера
• Робот: напряжение питания – 9В режим работы – реверсивный (рис. 5.7);
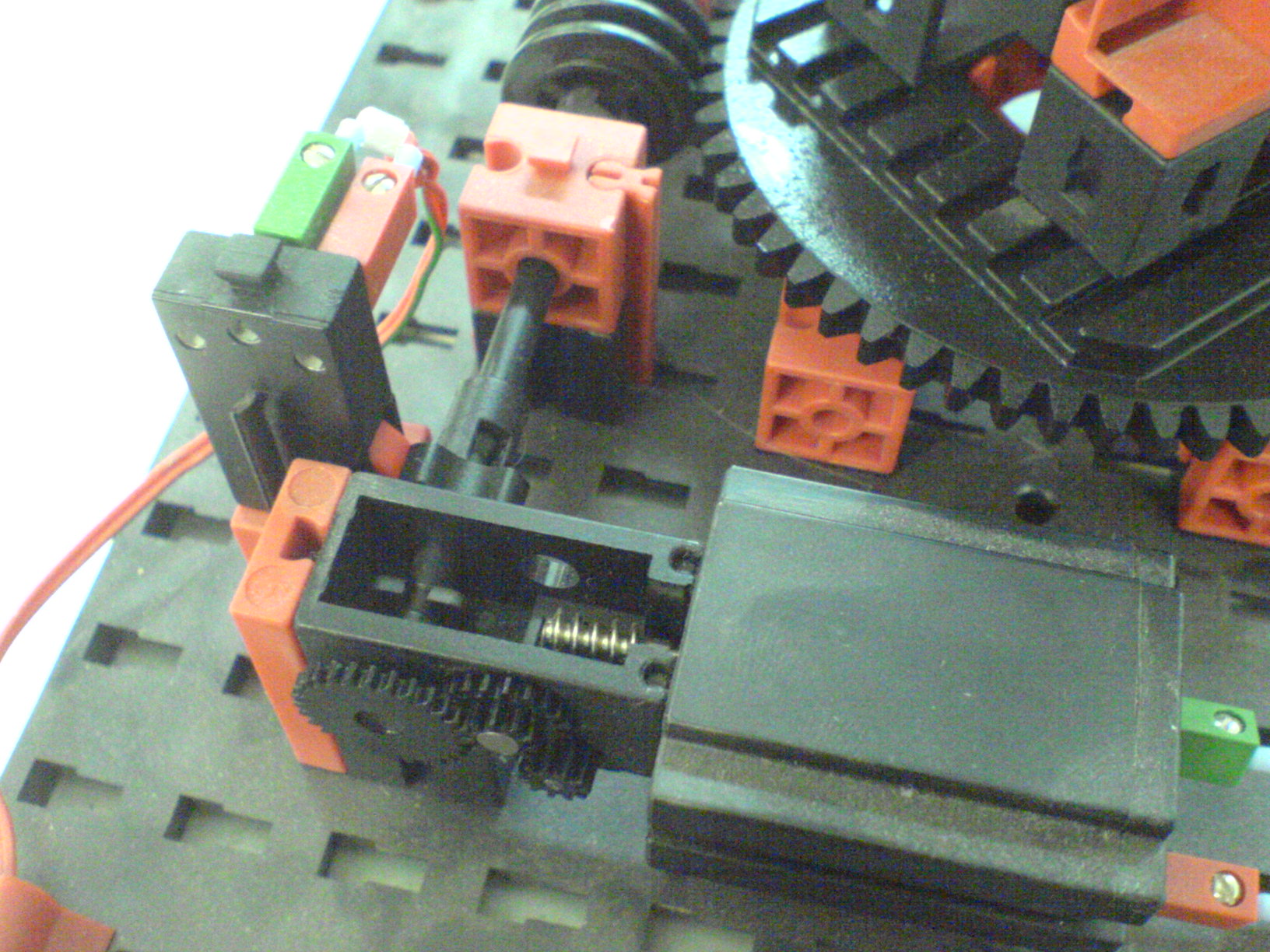

Рис. 5.7. Приводы робота: а) поворота, б) подьема
Управляющее устройство
Контроллер Beckhoff CX1000-000 (рис. 5.8.)
Основные характеристики контроллера Beckhoff CX1000-000.
• Совместимость с PentiumR MMX, частота 266 Мгц
• Compact Flash card
• ОЗУ 32 MB
Модули расширения
Дискретный вывод KL2408- 3 шт
• 24В
• 8 выходов
• Дискретный ввод KL1408 KL2408- 3 шт
• 0: -3 ÷ +5 В, 1: 11 ÷ 30В
• 8 входов
| А1 |
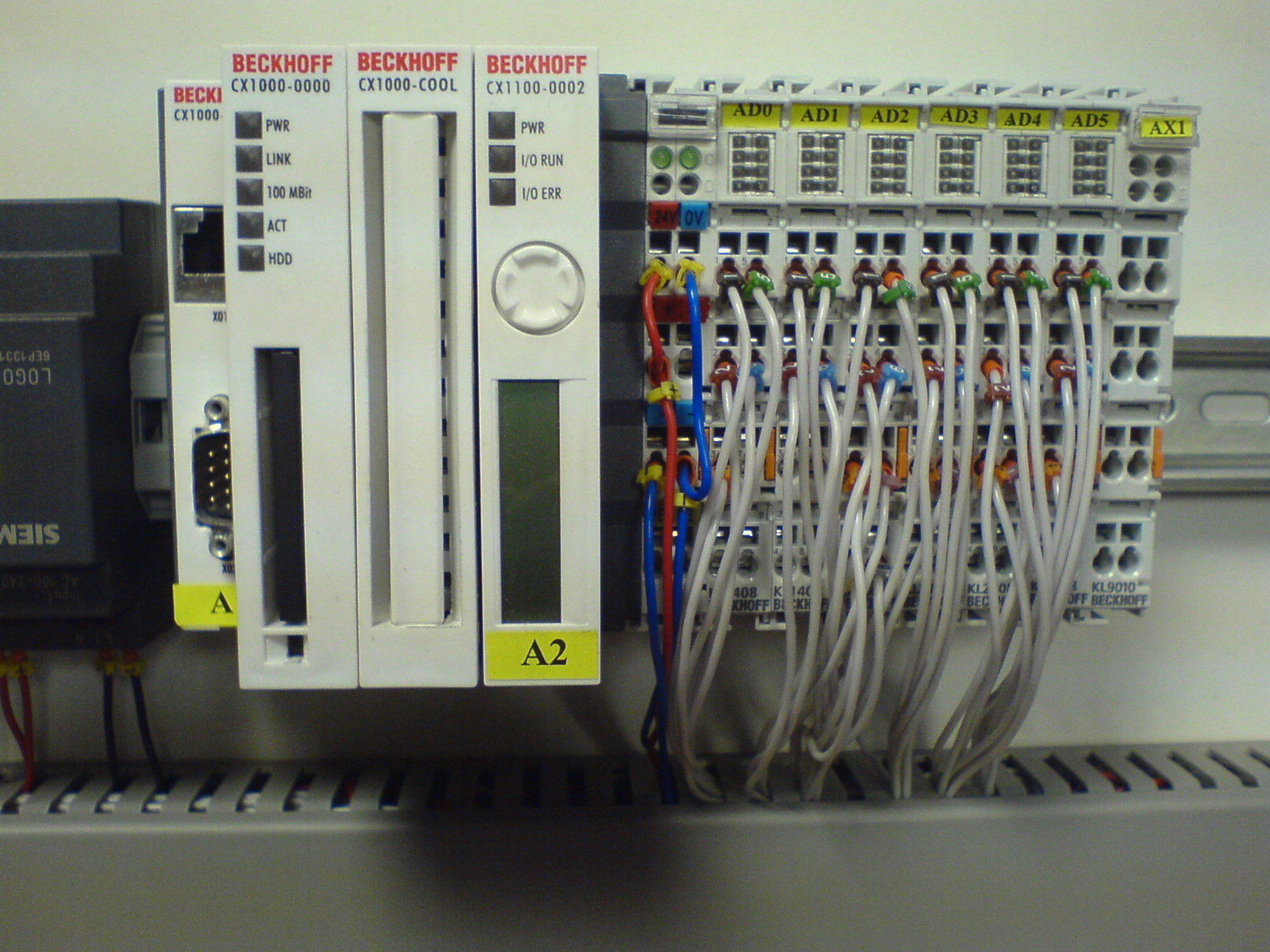
Рис. 5.8. Общий вид контроллера Beckhoff CX1000-000
| а) |
Дата добавления: 2021-09-25; просмотров: 533;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
