Импульсный лазерный дальномер это устройство, состоящее из импульсного лазера и детектора излучения (фотоприемника).
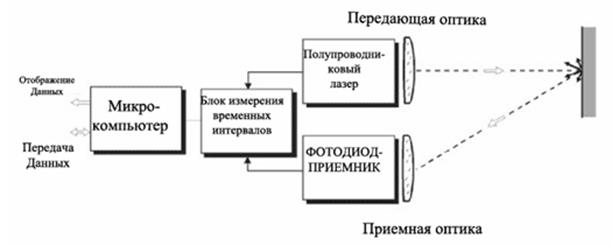
Измеряя время, которое затрачивает луч на путь до отражателя и обратно, а также зная значение скорости света, можно рассчитать расстояние между лазером и отражающим объектом.
При импульсном методе дальнометрирования используется следующее соотношение:

где  — расстояние до объекта,
— расстояние до объекта,  — скорость света в вакууме,
— скорость света в вакууме,  — показатель преломления среды, в которой распространяется излучение,
— показатель преломления среды, в которой распространяется излучение,  — время прохождения импульса до цели и обратно.
— время прохождения импульса до цели и обратно.

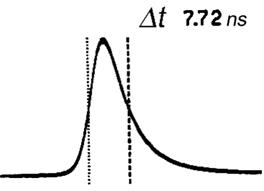
Типовая форма зондирующего импульса при импульсном методе
Каждый импульс – это однократное измерение расстояния, но поскольку каждую секунду могут быть посланы тысячи таких импульсов, то с помощью усреднения результатов достаточно быстро достигается высокая точность измерений.
Осреднение импульсов
В ходе измерения делается около 20000 лазерных импульсов в секунду. Затем они усредняются для получения более точного значения расстояния. Обычные импульсные дальномеры имеют несколько худшую точность, чем фазовые дальномеры (до 10 мм).
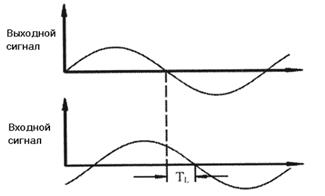
Фазовый лазерный дальномер - это дальномер, принцип действия которого основан на методе сравнения фаз отправленного и отражённого сигналов.
Принцип действия состоит в определении количества целых длин волн между локатором и объектом и разности фаз излученной и принятой волны модулирующего колебания.
Ширина полосы модуляции до 10 ГГц при использовании современных лазерных диодов (semiconductor laser diodes). Отметим, что в этом случае зондирующее излучение должно быть непрерывным, что в общем случае значительно повышает требования по выходной мощности излучающего лазера по сравнению с импульсным методом.
Для того, чтобы определить расстояние между источником и объектом, необходимо:
1. Определить целое количество длин волн модуляции K, приходящихся на это расстояние.
2. Определить разность фаз  между принятой и опорной волной и тем самым оценить дополнительное расстояние, соответствующее «последней» неполной волне.
между принятой и опорной волной и тем самым оценить дополнительное расстояние, соответствующее «последней» неполной волне.
Если значения K и удалось определить, то искомое расстояние определяется по формуле:
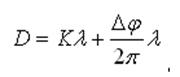
где  - длина волны модуляции.
- длина волны модуляции.
Лазерная система швартовки крупнотоннажных судов состоит из следующих элементов:
· лазерных сенсоров
· метеостанции, включающей датчики скорости и направления ветра и датчик высоты волны
· цифрового информационного табло
· центра управления (ЦУ), включающего компьютер ЦУ с программным обеспечением, принтер, источник бесперебойного питания
· канала связи, включающего мультиплексоры и оптоволоконную кабельную линию
Сбор данных
Сбор данных от датчиков системы и формирование группового сигнала осуществляется через мультиплексор. Волоконнооптический кабель обеспечивает соединение мультиплексора на причале и в центре управления. Отображение положения крупнотоннажных судов происходит на рабочем дисплее центра управления. Программное Обеспечение (ПО) состоит из электронной карты и базы данных.
Данные по судам автоматически сохраняются на жестком диске компьютера ЦУ с возможностью просмотра процесса швартовки и вывода на печать. ПО должно иметь модуль тестирования всей системы, включая компьютер ЦУ, датчики, табло. ПО производит расчет положения судов, скорости и направления ветра, волнения моря, температуры воздуха.
Состав базы данных
БД содержит следующие данные:
- название судна
- судовладелец
- время начала/конца постановки к причалу
- предупреждения в процессе постановки к причалу
- данные по стоянке судна (мониторинг состояния судна)
Дата добавления: 2017-10-04; просмотров: 3475;
Поиск по сайту
Узнать еще
- A Отсоедините внешние масло ... и этот болт на картере 5.14 Отсоедините болт заземления
- LeeBoy 1200S это машина 4 в 1
- А этот текст отобразится с новой строки.
- А) Естественные источники излучения
- А.Н.Леонтьев ПВ – это профессиональное общение педагога, имеющее определенные функции, направленное на оптимизацию учебной деятельности
- Алгебраическая сумма электрических зарядов тел или частиц, образующих электрически изолированную систему, не изменяется при любых процессах, происходящих в этой системе.
- Амплитудно-импульсный элемент и его эквивалентное представление.
- Анализаторы — это приборы, с помощью которых анализируется поляризованный свет.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
