Избыточные (повторяющиеся) связи и местные подвижности в механизмах
Наряду с движениями и условиями связей, которые в механизме влияют на закон преобразования движения, могут существовать такие связи и движения,
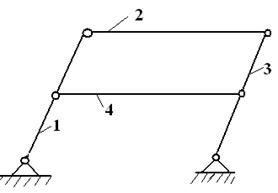
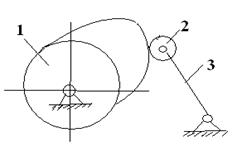
Рисунок 1.8 Рисунок 1.9
которые не влияют на этот закон. Такие связи называются избыточными, а движения – местными подвижностями,или лишними степенями свободы. Одна избыточная связь уменьшает расчётную подвижность на единицу, а одна местная подвижность увеличивает её на единицу. На рис. 1.8 показан механизм шарнирного параллелограмма, у которого противоположные стороны попарно равны (отсюда его название). Расчёт подвижности этого механизма даёт
Wрасч. = 3∙n – 2∙p5 = 3∙4 – 2∙6 = 0,
что означает полное отсутствие движения звеньев, т. е. это не механизм, а ферма.
Фактически же очевидно, что движение звеньев здесь возможно при ведущем, например звене 1, т. е. фактическая подвижность
Wфакт.= 1.
Звенья 2 и 4 выполняют одну и ту же функцию, передавая движение на звено 3, разделяя надвое общий силовой поток, снижая нагрузку, приходящуюся на каждое из них. С точки зрения структуры одно из этих звеньев (например, звено 4) можно считать избыточной связью.
Если подсчитать подвижность кулачкового механизма (рис. 1.9), то окажется, что его Wрасч. = 2, т.е. в этом механизме должно быть два ведущих звена, что невозможно, так как W факт= 1. Местной подвижностью здесь является вращение ролика 2 относительно толкателя 3. Так как это движение не участвует в преобразовании движения в механизме, то оно является лишней степенью свободы. В данном случае это движение необходимо для замены трения скольжения трением качения, что является более выгодным с точки зрения потерь на трение (повышение КПД).
При выполнении структурного анализа механизмов избыточные связи и местные подвижности должны быть исключены.
Вопросы для самопроверки
1. Что такое машина, механизм, в чём их различие?
2. Что называют звеном механизма?
3. Что называют кинематической парой?
4. Как классифицируются плоские кинематические пары?
5. Что называется кинематической цепью?
6. Как рассчитать подвижность плоского механизма?
7. Какой физический смысл имеет подвижность механизма?
8. Что собой представляет избыточная связь?
9. Что такое местная подвижность (лишняя степень свободы)?
10. В чём состоит принцип структурного образования механизмов по Л.В. Ассуру?
11. Что такое исходный механизм?
12. Что такое группа Ассура, как классифицируются группы Ассура?
13. Что называют формулой строения механизма?
14. По каким признакам классифицируют механизмы?
15. Как осуществляется замена высших пар низшими?
Дата добавления: 2017-10-04; просмотров: 982;
Поиск по сайту
Узнать еще
- II. Степень насыщенности, определяемая природой связи между атомами углерода.
- RC-генератор с лестничной схемой обратной связи
- А. Микрофоны с каналами связи.
- Автономные и местные системы очистки сточных вод.
- Анализ взаимосвязи затрат с объемом производства и прибылью
- Аналоговые волоконно-оптические системы связи
- Аппаратура сетей связи
- Безопасность сетей сотовой связи GSM

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
