Принципы рулевого управления
Летательный аппарат как объект управления
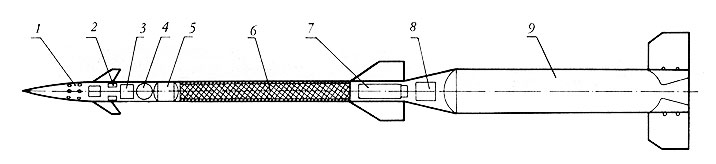
Современный управляемый реактивный снаряд или ракета состоит из следующих основных частей: корпуса, двигателя (находится внутри корпуса), рулевых органов, аппаратуры управления, полезной нагрузки. Кроме того, ракеты с аэродинамическим управлением содержат как обязательный элемент – крылья. Баллистические ракеты летят вне атмосферы и крыльев не имеют.
Большинство современных управляемых ракет имеют корпус цилиндрической формы с овальной или конической носовой частью. В носовой части размещается обычно аппаратура самонаведения. Форма хвостовой части меньше сказывается на лобовом сопротивлении, поэтому выполняется в виде цилиндра того же диаметра, что и основная часть. В хвостовой части размещается сопло реактивного двигателя и аппаратура для радиоприема команд телеуправления. Основными геометрическими характеристиками корпуса является длина, диаметр и площадь миделя (наибольшая площадь поперечного сечения).
Для примера рассмотрим схемы некоторых ракет (рисунок 2.1-2.4).
| |
|
|
Рисунок 2.1- Зенитная управляемая ракета ЗУР 9М311
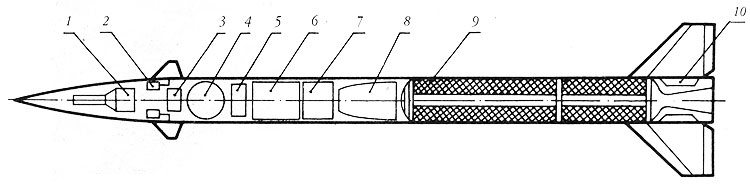 Рисунок 2.2 - ЗУР 9М33
Компоновка ЗУР 9М33:
Рисунок 2.2 - ЗУР 9М33
Компоновка ЗУР 9М33:
|
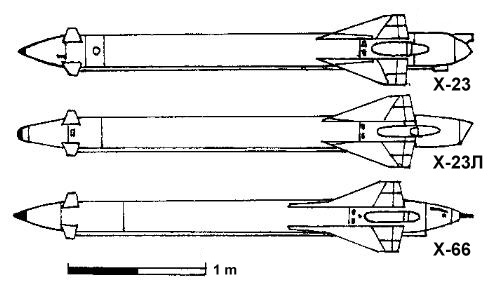
Рисунок 2.3 - Проекции ракет «Воздух- Земля» семейства AS-7

Рисунок 2.4- Управляемая авиабомба GBU-10 Paveway II
Управление полетом ЛА осуществляется изменением направления его вектора скорости  , т.е. сообщением аппарату ускорения
, т.е. сообщением аппарату ускорения  (рисунок 2.5). При этом изменение модуля скорости осуществляется созданием касательного ускорения
(рисунок 2.5). При этом изменение модуля скорости осуществляется созданием касательного ускорения  , а изменение направления вектора скорости созданием поперечного ускорения
, а изменение направления вектора скорости созданием поперечного ускорения  . Поперечное ускорение в декартовой системе координат определяется своими составляющими
. Поперечное ускорение в декартовой системе координат определяется своими составляющими  и
и  , а в полярной системе координат модулем
, а в полярной системе координат модулем  и полярным углом θ. Управление величиной и направлением ускорения осуществляется при помощи рулевых органов.
и полярным углом θ. Управление величиной и направлением ускорения осуществляется при помощи рулевых органов.
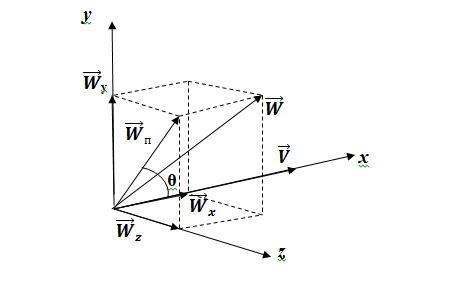
Рисунок 2.5 - Связь скорости ЛА и ускорений
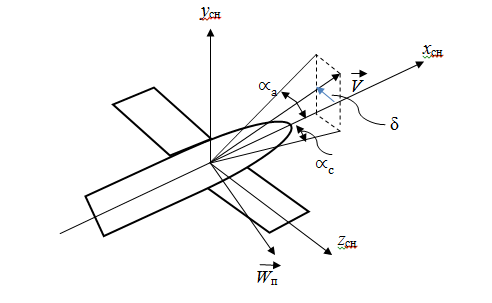 При полете ракеты вектор ее скорости составляет с продольной осью xсн угол δ (рисунок 2.6). Этот угол складывается из угла атаки
При полете ракеты вектор ее скорости составляет с продольной осью xсн угол δ (рисунок 2.6). Этот угол складывается из угла атаки  и угла скольжения
и угла скольжения  . Обычно угол δне превышает нескольких градусов,
. Обычно угол δне превышает нескольких градусов, 
Рисунок 2.6 – Соотношения между углами скорости 
Поперечное ускорение  перпендикулярно скорости , но в силу малости угла δ можно в первом приближении полагать, что поперечное ускорение ракеты перпендикулярно ее продольной оси, т.е. расположено в плоскости yz, как это показано на рисунке 2.5.
перпендикулярно скорости , но в силу малости угла δ можно в первом приближении полагать, что поперечное ускорение ракеты перпендикулярно ее продольной оси, т.е. расположено в плоскости yz, как это показано на рисунке 2.5.
Так как
 (2.1)
(2.1)
где  — результирующая сила, приложенная к аппарату, имеющему массу m,
— результирующая сила, приложенная к аппарату, имеющему массу m,
то управление ускорением достигается изменением результирующей силы  . Изменение силы осуществляется путем изменения силы тяги
. Изменение силы осуществляется путем изменения силы тяги 
(создаваемой реактивным или каким-либо иным двигателем) и (или) результирующей аэродинамической силы  (создаваемой воздушным потоком, обтекающим аппарат).
(создаваемой воздушным потоком, обтекающим аппарат).
 , (2.2)
, (2.2)
где  - сила тяги (реактивная сила),
- сила тяги (реактивная сила),  - сила тяжести.
- сила тяжести.
Управление производится газовыми или воздушными рулевыми органами (рулями).
Эффективность действия рулевых органов определяет маневренность ЛА. Последняя характеризуется или минимально допустимым радиусом разворота  , или максимально допустимым поперечным ускорением
, или максимально допустимым поперечным ускорением  , или перегрузкой n, которые при постоянной скорости полета связаны зависимостями
, или перегрузкой n, которые при постоянной скорости полета связаны зависимостями
 , (2.3)
, (2.3)
 , (2.4)
, (2.4)
где g – ускорение силы тяжести.
Для ракет ближнего действия основным типом рулевых органов являются воздушные рули; газовые рули если и применяются, то лишь в качестве вспомогательных. Для ракет дальнего действия оба типа рулей являются основными.
Такое различие в применении газовых и воздушных рулей объясняется следующими основными причинами:
1. Ракеты дальнего действия должны иметь возможность управления на значительно больших высотах, чем ракеты ближнего действия, а эффективность воздушных рулей убывает с высотой пропорционально убыванию плотности воздуха.
2. В ракетах дальнего действия двигатель работает лишь на небольшой части траектории (на активном участке). На этом участке траектории можно без особых трудностей обеспечить значительное превышение силы тяги T над силой тяжести G (в 5-10 раз). Поэтому управлении силой тяги позволяет сообщать ракете ускорения порядка 5÷10g.
3. У ракет ближнего действия вся (или почти вся) траектория является активной, поэтому двигатель должен работать все (или почти все) время полета ракеты. Это требование наряду с требованием малых габаритов и стоимости таких ракет приводит к тому, что что сила тяги обычно лишь незначительно превосходит силу тяжести G. T≈ 1,5÷2 G. Поэтому управление силой тяги не дает обычно возможности получать ускорения более g. В то же время для обеспечения необходимой маневренности ракете могут потребоваться поперечные ускорения до 5÷10g (например, для зенитных или авиационных ракет).
В некоторых случаях управление величиной скорости аппарата на основном участке его траектории не требуется и осуществляется управление только направлением полета. При этом достаточно иметь рулевые органы, управляющие лишь поперечным ускорением .
Дата добавления: 2017-09-01; просмотров: 2631;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Общие методические принципы в канистерапии
- VI. Биоэнергетические принципы аналитической терапии
- Автоматизации и управления
- Автоматизация как направление дальнейшего совершенствования управления силами и средствами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
