Из условия экстремума
d(  /
/  )/dKu = 0 (5.15)
)/dKu = 0 (5.15)
найдем оптимальное:
(Uс/Uинф)опт =  . (5.16)
. (5.16)
Подставив это значение в (5.14), получим, что
( / )макс =  . (5.17)
. (5.17)
 |
Допустим, что для нормальной работы индикатора должны выполняться условия
≥ U50 (5.18)
≤ U10. (5.18,а)
После несложных преобразований, с учетом (4.32) и (5.17), получим
( / )макс = ≥ γ50−10 + 1. (5.18,б)
В табл. 5.1 показана зависимость ( / )макс от числа строк Nс. Здесь видно, чтос увеличением Nс величина ( / ) → 1.
Таблица 5.1
| Число строк | ||||||||||
| Схема 3:1 | 2,23 | 1,91 | 1,73 | 1,61 | 1,52 | 1,46 | 1,41 | 1,37 | 1,34 | 1,04 |
| Схема с опти-мальным КU | 2,41 | 1,93 | 1,73 | 1,62 | 1,54 | 1,49 | 1,45 | 1,41 | 1,38 | 1,11 |
Таким образом, для выполнения (5.18, б) требуется малое γ,т. е. более крутая характеристика ЖК-индикатора. В табл. 5.1 для сравнения приведены значения ( / )макс,рассчитанные для схемы выборки 3:1 (т. е. для неоптимизированных Uс/Uинф) путем подстановки Ku = 3 в формулу (5.14). Из таблицы следует, что схема 3:1 соответствует оптимальной ситуации только при Nc = 4.
Из изложенного следует, что хотя двухкоординатная матричная адресация и позволяет значительно уменьшить число выводов индикатора и выходов схем управления по сравнению с однокоординатной адресацией, но при ее использовании с увеличением Nc уменьшаются tв, Lv.каж и Kобр.дм. Кроме того, в таком случае увеличение скважности q возбуждающих сигналов, происходящее при увеличении Nс, приводит к необходимости использования более мощных формирователей.
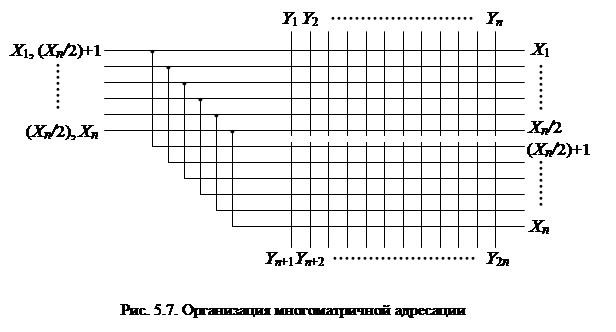
Для уменьшения влияния этих недостатков обычной двухкоординатной матричной адресации можно разделить индикаторное поле на части и адресовать каждую из них независимо. Например, разделение на две части позволяет одновременно адресовать две строки. Для таких матричных систем в (5.11), (5.18, б) можно подставить Nс/Kм, где Kм − число частей матрицы, что значительно облегчает его выполнение. На практике в виде монолитных приборов реализуются системы с Kм =2, для чего в прямоугольном индикаторе достаточно посередине рассечь провода столбцов и обеспечить подвод к удвоившемуся числу столбцов напряжений и токов, подаваемых с разных сторон индикаторного поля (рис. 5.7). Большие значения Kм легко получить, создавая экран из субблоков, например, на основе ГИП постоянного тока ИГПП-32×32.
 |
Использование ЭО с внутренней памятью в двухкоординатной матричной системе адресации (например, в случае индикаторных тиратронов или ячеек ГИП переменного тока) дает возможность для значительного уменьшения скважности. Поэтому, благодаря «памяти», после возбуждения ЭО остается включенным в течение всего интервала времени Tобндо записи новой информации. Для этого случая скважность в (5.2) определяется из следующего выражения:
q = Tобн/( Tобн - tв). (5.19)
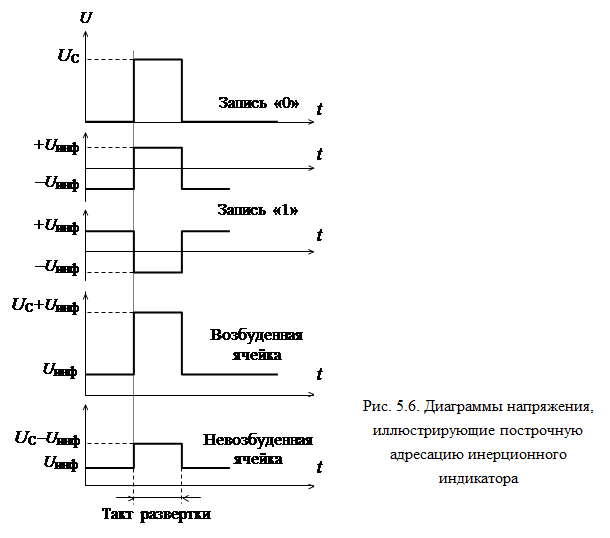
Ранее рассматривались ЭО, состояние которых полностью определяется одним сигналом − напряжением, приложенным между входами. Напомним, что при однокоординатной адресации потенциал изменяется только на одном входе, а другой, как правило, присоединен к общей шине схемы. При двухкоординатной матричной адресации для изменения напряжения используется изменение потенциалов обоих входов. Однако достаточно сравнить (4.19) и (4.25), чтобы понять, что возбуждение ЭО в обоих случаях определяется только одним параметром − напряжением на электродах. Соответственно такие системы адресации назовем одноуровневыми. Практически во всех типах индикаторов, у которых ЭО содержат два электрода (полупроводниковых, электролюминесцентных, вакуумных накаливаемых, газоразрядных цифровых, жидкокристаллических), использована одноуровневая адресация.
В более сложных приборах, подобных индикаторным тиратронам и вакуумным люминесцентным индикаторам, содержащим больше двух электродов на ЭО, использована многоуровневая система управления, при которой состояние ЭО определяется сигналами, подаваемыми на несколько независимых управляющих входов. Число управляющих входов в многоуровневых системах может быть и больше двух, например индикаторные тиратронные матрицы имеют до пяти независимых управляющих входов.
Системы с многоуровневой адресацией позволяют использовать уже не двухкоординатную, а многокоординатную адресацию. В общем случае многоуровневой адресации выражение (5.5) приобретает вид
Nу = Nв = Nв.эо [  ], (5.20)
], (5.20)
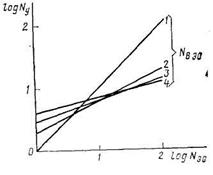 где Nв.эо − число управляющих входов одного ЭО. Из зависимостей Nу = Nв = = f(Nэо), определенныхдля различных значений Nв.эо, следует, что увеличение числа Nв.эоэффективно с точки зрения уменьшения Nу, Nвтолько начиная с определенного числа Nэо. Заметим, что формула (5.20) сохраняет смысл и при Nв.эо= 1, что соответствует однокоординатной адресации.
где Nв.эо − число управляющих входов одного ЭО. Из зависимостей Nу = Nв = = f(Nэо), определенныхдля различных значений Nв.эо, следует, что увеличение числа Nв.эоэффективно с точки зрения уменьшения Nу, Nвтолько начиная с определенного числа Nэо. Заметим, что формула (5.20) сохраняет смысл и при Nв.эо= 1, что соответствует однокоординатной адресации.
Дальнейшим развитием систем многоуровневой адресации являются системы адресации с самосканированием, отличающиеся тем, что управляющее воздействие по одному из входов создается за счет внутренних свойств индикатора. Наиболее часто для этой цели используется зарядовая связь между выбираемым и соседним ЭО, который предварительно возбуждается. Примером такого прибора является ГИП с самосканированием. Логический эквивалент ГИП с самосканированием изображен на рис. 5.8.
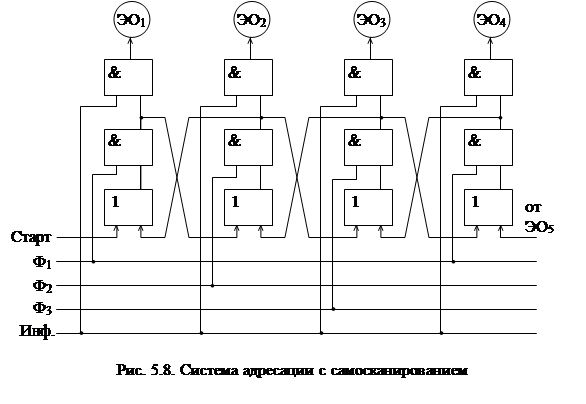 |
Каждый ЭО можно рассматривать как трехступенчатую логическую схему 2ИЛИ−2И−2И. Сигнал на выходе каскада ИЛИ появляется тогда, когда есть выходной сигнал на входе элемента ИЛИ одного из соседних ЭО (в ГИП с самосканированием это соответствует перемещению разряда сканирования в соседний ЭО). Сигнал на выходе элемента ИЛИ возникает, если, при выполнении предыдущего условия, подается фазовый импульс. Сигнал на выходе каскада &2 появляется при выполнении еще одного условия − при наличии информационного импульса (в ГИП с самосканированием это соответствует подаче импульса на индикаторный анод). Под управлением фазовых импульсов обеспечивается перемещение подготовительного состояния от ЭО1 (при условии, что в момент времени t = 0 был подготовлен ЭО0) к ЭО4. Каждое перемещение происходит за один такт. Чтобы произошло высвечивание подготовленного ЭО в данном такте, надо также подать сигнал на информационный вход (ИНФ). Для приведенной на рис. 5.8 последовательности сигналов высвечиваются ЭО2 и ЭО3. Организация самосканирования возможна с помощью любой системы m-фазных импульсов при m ≥ З.
Преимуществом системы адресации с самосканированием по сравнению с двухкоординатной матричной адресацией является уменьшение числа выводов индикатора и каналов управления. Последнее достигается с помощью встроенной в индикатор системы развертки. В то же время не следует забывать, что конструкции индикаторов с самосканированием значительно сложнее, чем обычных матричных индикаторов.
При рассмотрении систем матричной адресации считалось, что включение ЭО происходит на максимальное время выборки, что позволяет получить только черно-белые изображения без градаций яркости полутонов. Очевидно, что для создания полутонов требуется не просто включение ЭО, а регулировка его кажущейся яркости. При ЭО без внутренней памяти для получения полутоновых изображений применяют амплитудно-импульсную, широтно-импульсную и амплитудно-широтно-импульсную модуляции.
При широтно-импульсной модуляции меняется только длительность импульса tипри неизменной его амплитуде. При этом необходимо, чтобы длительность tи,соответствующая минимальной яркости, была значительно больше времен τрк, τр.лк индикатора, что ограничивает диапазон модуляции.
При амплитудно-импульсноймодуляции меняется только амплитуда, а длительность светового импульса остается постоянной. Диапазон регулирования здесь ограничивается насыщением электрооптической характеристики.
Наиболее широкий диапазон изменения яркости получают с помощью комбинированной амплитудно-широтно-импульсной модуляции.
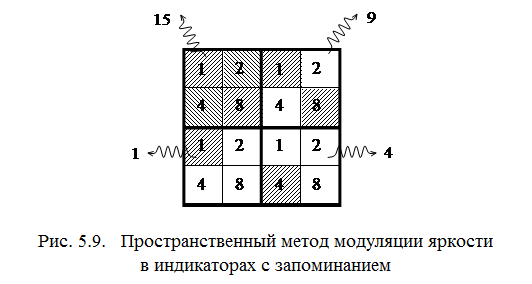
Значительно сложнее создавать полутона в индикаторе с внутренней памятью. В простейшем случае каждый элемент отображения составляется из субэлементов, интенсивности излучения которых отличаются в определенное число раз. На рис. 5.9 для интенсивностей излучения с весовыми коэффициентами 1:2:4:8 иллюстрируется получение 16 уровней яркости с помощью четырех ячеек. Однако, когда субъячейки находятся в одной плоскости, снижается разрешающая способность индикатора, при расположении в разных плоскостях (друг за другом) конструкция усложняется.
Для получения полутонов в индикаторе с памятью также часто используется метод разделения кадра на поля с различными двоично-взвешенными длительностями. В конце каждого поля на все ЭО обязательно подается стирающий импульс Uст. При необходимости включения одного ЭО на него в начале поля подается записывающий импульс Uзап. В результате интегрируемая глазом яркость Lυ каж оказывается пропорциональной сумме весов излучения полей.
 |
Использование взвешенных полей не дает уменьшения разрешающей способности, однако накладывает более жесткие, чем обычно, временные ограничения на значение времени выборки tв.Действительно, так как обращение к ЭО должно происходить в каждом поле кадра, то (5.2) трансформируется в виде
 , (5.21)
, (5.21)
где Мпл − число полей. Например, для пятисотстрочного индикатора при Мпл = 6 и fк = 50 Гц формула (5.21) дает tв − 6,6 мкс, в то время как по (5.2) tв = 40 мкс.
Не менее существенным недостатком использования взвешенных полей является необходимость сохранять во внешнем ЗУ сигнал уровня яркости для всего индикаторного поля в течение кадра. При воспроизведении цветного телевизионного изображения это означает необходимый объем ЗУ в несколько мегабитов.
Дата добавления: 2017-05-02; просмотров: 1011;
Поиск по сайту
Узнать еще
- Cдвиг ветра. Воздействие на взлёт и посадку ВС. Рекомендации по выполнению полётов и управлению воздушным движением в условиях сдвига ветра.
- IV. Внешние условия развития отрасли информационных технологий
- XLV. ОБЛАСТЬ И УСЛОВИЯ ПРИМЕНЕНИЯ ЭЛЕКТРООБОРУДОВАНИЯ
- А). Условия подобия режимов работы ГТД
- Абсолютная мобильность капитала в условиях фиксированных валютных курсов
- Адаптации организмов к условиям среды
- АДАПТАЦИЯ И ОСНОВНЫЕ СПОСОБЫ ПРИСПОСОБЛЕНИЯ ЖИВЫХ ОРГАНИЗМОВ К ЭКСТРЕМАЛЬНЫМ УСЛОВИЯМ СРЕДЫ
- Адаптация к условиям длительных перелетов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
