Лекция 6. Стандартные интерфейсы периферийных устройств микроЭВМ
Все внешние блоки, подключаемые к микроЭВМ, считаются периферийными – клавиатура, принтер, датчики, исполнительные механизмы, линии связи и т.д. Каждый из них обладает индивидуальным интерфейсом – совокупностью параметров, характеризующих его входы и выходы. К параметрам интерфейса относятся тип электрического разъема, уровни сигналов и порядок их поступления, форма представления информации электрическими сигналами и т.д. Для удобства подключения к микроЭВМ периферийных блоков, соединения нескольких ЭВМ в вычислительную сеть, в мировой практике разработаны и приняты в качестве стандартных ряд интерфейсов.
Блоки, входящие в состав судовых МПСУ и удаленные от друг от друга на расстояние более нескольких метров, оснащаются последовательными стандартными интерфейсами. Через такой интерфейс цифровой информационный сигнал определенной разрядности (7 или 8 разрядов) по времени передается последовательно, разряд за разрядом. Для его передачи по минимуму требуется всего два провода. Это решающее преимущество последовательных интерфейсов, в отличие от параллельных, где число проводов должно быть не менее числа разрядов передаваемого двоичного кода.
В судовых МПСУ используются стандартные последовательные интерфейсы нескольких типов:
- RS-232С: уровни электрических сигналов – "0" - +5…+15 В; "1" – -5…-15В; гальваническая развязка цепей отсутствует; число проводов от 3 до 17, дальность до 17 м;
- CL – ( англ. "current loop" – токовая петля): уровни электрических сигналов – "0"»0 мА, "1"»20 мА; имеется гальваническая развязка источника и приемника сигнала; число проводов – 4 (по два для каждого направления передачи); дальность до 1000 м и более.
Кроме этого, применяются и другие разновидности интерфейсов, например RS-422, RS-485 – модификации интерфейса RS-232С, у которых число проводов снижено до минимума, сигналы соответствуют ТТЛ-уровням и обеспечивается гораздо более высокая скорость передачи информации.
Обмениваться информацией могут только те блоки МПСУ, которые имеют одинаковые интерфейсы и эти интерфейсы одинаково настроены. Одним из настроечных параметров последовательного интерфейса является скорость передачи информации, единицей измерения которой является "бод" (англ. "baud"). Скорости передачи 1 бод соответствует передача одного разряда двоичного кода в секунду (1 бит/с). Например, "4800 baud rate". Настройка интерфейсов может выполняться с помощью:
- малогабаритных модульных переключателей, выполненных в DIP-корпусе (см. далее);
- джамперов (jumper) – переставляемых перемычек;
- программно, т.е. изменением параметров программы, обслуживающей интерфейс.
В качестве примера можно привести блоки автоматики норвежской фирмы Norcontrol, которыми она комплектует судовые МПСУ "Data chief - 7", "Data chief - 2000". Каждый из этих блоков выполнен в виде микроЭВМ, имеющей два стандартных интерфейса для связи с другими аналогичными блоками: CL – основной, RS-422 – дополнительный. Скорость передачи информации может настраиваться DIP-переключателями в диапазоне от 110 бод до 9600 бод. Настраиваются также и некоторые другие параметры интерфейсов.
Интерфейсы RS-232С, RS-422, CL широко применялись для объединения судовых управляющих ЭВМ в локальную вычислительную сеть (ЛВС) в судовых МПСУ, разработанных в 80-е годы – в системах "Selma", "Damatic", "Data chief-7" и др. Эти интерфейсы изначально были разработаны для подключения к ЭВМ одиночных периферийных блоков. Они являются двухточечными – предназначены для соединения между собою только двух блоков (ЭВМ – принтер, ЭВМ – клавиатура и т.д.). В настоящее время для этой цели используется более современный интерфейс RS-485. Им оснащаются блоки как судовой, так и общепромышленной автоматики.
Для объединения управляющих ЭВМ в ЛВС на судах все большее применение находит так называемая шина CAN (Controller Area Network). Она представляет собою двухжильный кабель для последовательной передачи данных в обоих направлениях (поочередно) со скоростью до 1 Мбит/с на расстояние до нескольких тысяч метров. Место подключения ЭВМ к шине именуется узел – (англ. – node). Каждый узел (ЭВМ) имеет свой идентификационный номер, способен независимо запрашивать доступ к шине и передавать через нее данные. Передающий блок (ЭВМ) посылает сообщение ко всем другим блокам. Но из множества ЭВМ, подключенных параллельно к CAN-сети, информацию получает тот, чей номер указан в информационном сообщении, передаваемом через шину.
Для подключения к персональным ЭВМ (англ. – PC) периферийных устройств (принтер, сканер и др.) взамен многочисленных и устаревших последовательных интерфейсов в настоящее время широко используется универсальная последовательная шина USB (англ. – Universal Serial Bus). Она содержит 4 провода, два из которых служат для последовательной передачи данных со скоростью до 12 Мбит/с, а по двум другим к устройству может подаваться питание +5 В. Шина USB, строящаяся по древовидной структуре, позволяет подключать к PC множество периферийных устройств. Ее эксплуатационными достоинствами является то, что она позволяет подключать, конфигурировать (настраивать), использовать и отключать устройства во время работы PC и самих устройств, а пользователь избавлен от необходимости настраивать параметры интерфейса.
тем не менее, несмотря на прогресс в данной области, самый старый из последовательных интерфейсов - RS-232С продолжает использоваться в персональных ЭВМ. Такой интерфейс имеют порты РС, именуемые как "СОМ1"…"СОМ4".
Лекция 7. Микропроцессорные системы централизованного контроля. Блок SAU 8800
СЦК современных судов выполняются на основе микроЭВМ. Типичным примером является система централизованного контроля "Data chief 7 midi" норвежской фирмы "Norcontrol". Ее структурная схема дана на рис. 1.
Основу СЦК составляют блоки двух типов: ОСР8800 – клавиатура и одновременно пульт управления; SAU8800 – блок сбора и обработки информации. Эти блоки выполнены в форме микроЭВМ. Каждый блок SAU по существу является "маленькой" СЦК, контролирующий 32 параметра и способной функционировать как в составе системы, так и автономно. Число таких блоков, включаемых в систему, определяется количеством контролируемых параметров и может достигать 10. Связь блоков SAU с панелью управления ОСР8800 осуществляется по стандартному интерфейсу CL ("токовая петля"). Прием и обработка сигналов от датчиков параметров, сопоставление их с уставками, формирование временных задержек, т.е. основной объем функций СЦК выполняется непосредственно в блоках SAU. Блок ОСР, располагаемый в центральном посту управления (ЦПУ) энергетической установки, обеспечивает вывод информации оператору и дистанционное управление блоками SAU. Результаты контроля отображаются на мониторе, регистрируются принтером. Блок ОСР обеспечивает формирование тревожных светового и звукового сигналов в машинном отделении, а также обобщенные тревожные сигналы, поступающие на ходовой мостик судна и в блоки обобщенной сигнализации БОС, расположенные в каютах механиков и в других судовых помещениях.
 |
Рис. 1. Структурная схема СЦК "Data chief 7 midi"
Структурная схема блока SAU8800 дана на рис. 2. Основу блока составляет 16-разрядный микропроцессор МП типа 8088. В микросхемах памяти типа EPROM хранится управляющая программа. Память типа EEРROM служит для хранения параметров, изменяемых в процессе эксплуатации – уставок, конфигурации SAU (т.е. какие датчики к каким каналам подключены), параметров каналов и т.д. Память типа RAM служит для хранения данных, получаемых в работе SAU.
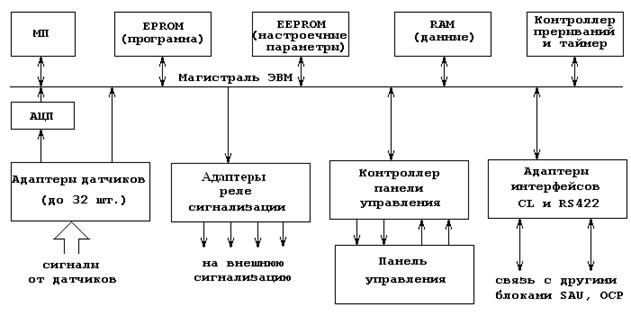 |
рис. 2. Структурная схема блокаSAU8800
На каждый тип датчика используется собственный адаптер, выполненный на отдельной плате. Максимальное их число – 32. Разработанная фирмой номенклатура адаптеров позволяет использовать такие аналоговые датчики, как термопары (типа NiCr/Ni), платиновые терморезисторы (типов Pt100, Pt50), датчики других типов, формирующие унифицированные аналоговые сигналы в диапазоне 0…10 В, 0…5 В и т.д., а также датчики дискретного действия (On/OFF), формирующие логические сигналы уровней ТТЛ или до 24 В. Сигналы с адаптеров аналоговых датчиков преобразуются в АЦП в цифровой 12-разрядный код.
При автономном использовании блока SAU им формируется несколько сигналов для управления внешней сигнализацией, с помощью адаптеров, управляющих срабатыванием встроенных в блок реле.
Панель управления содержит индивидуальные световые индикаторы по каждому каналу (светодиоды – LED), засвечиваемые при достижении уставки, цифровые индикаторы для вывода значений параметров и уставок и индикации неисправности, а также органы управления в виде кнопок. Управление панелью осуществляется через отдельный контроллер.
Связь с другими блоками SAU обеспечивается адаптером последовательного интерфейса CL, имеющим два канала, основной и дополнительный. Имеется также два дополнительных адаптера интерфейса RS-422.
Контроллер прерываний и таймер задают периодичность ввода и обработки сигналов датчиков, обновления информации, выводимой на панель управления, а также скорость передачи данных по последовательным интерфейсам.
Блок SAU имеет встроенные средства самоконтроля, реализованные в виде специальных программ. Если обнаружена неисправность, на индикаторе SAU высвечивается код неисправности, выходные сигналы приводятся к безопасным уровням, включается специальное реле. Если нарушается связь с другими блоками SAU, то автоматически осуществляется переход в автономный режим работы. Отдельной программой проверяется исправность всех оптических приборов индикации на панели управления. Она запускается в работу отдельной кнопкой.
Микросхемы EPROM, EEРROM, RAM, а также некоторые другие установлены в контактных панельках (сокетах) и в эксплуатации могут быть оперативно заменены.
Конструктивно СЦК может быть выполнена в виде обособленной, функционирующей самостоятельно системы, как это и представлено на рис. 1. Однако более типичной является ситуация, когда построенная на базе микроЭВМ СЦК интегрирована (встроена) в систему комплексной автоматизации СЭУ, выполненную также на основе микроЭВМ. То есть является одной из ее подсистем автоматики. При этом конкретная микроЭВМ системы комплексной автоматизации может одновременно решать как задачи СЦК, так и другие задачи, например – управления оборудованием. Так, рассмотренная в данном разделе СЦК "Data chief-7 midi" является одной из подсистем микропроцессорной системы управления " Data chief-7 ", рассматриваемой ниже, а фактически ее вырожденным до минимума вариантом, выполняющим только функции СЦК.
Дата добавления: 2017-05-02; просмотров: 2109;
Поиск по сайту
Узнать еще
- I. Режимы работы электротехнических устройств.
- II. Особенности политического устройства Ирана
- IV. Термодатчики, их устройство и назначение.
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- UMTS интерфейсы транспортной сети
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. УСТРОЙСТВО ВЫХОДОВ ИЗ ГОРНЫХ ВЫРАБОТОК

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
