ДЕЙСТВИЕ МЕХАНИЗМА ТОКОПРИЕМНИКА ПРИ ПОДЪЕМЕ И ОПУСКАНИИ.
Опущенное состояние. Подъёмные пружины 18 под действием веса подвижных частей и растянутых опускающих пружин 6 растянуты. Это исключает самопроизвольный подъём подвижных рам, так как для их подъёма опускающие пружины необходимо сжать (рисунок 22).
Действие механизма при подъёме. Сжатый воздух в цилиндр токоприемника подается клапаном токоприёмника через калиброванное отверстие редукционного отверстия 2, размер которого устанавливается регулировочным винтом 3. Поршень начинает постепенно перемещаться и сжимать опускающие пружины 6 Шток 4 поршня 9 поворачивает на оси 13 рычаг штока 12, который перемещает две тяги. Тяга 10, перемещаясь вправо, своей проушиной через кронштейн 22 освобождает главные валы 11. Растянутые подъёмные пружины 18 сжимаясь, поворачивают главные валы 11 вовнутрь, и подвижные рамы 15 и 16 начинают перемещаться вверх. Тяга 14, перемещаясь влево, постепенно открывает кран 1. При касании полозами контактного провода кран полностью открывается. Подъем подвижных рам прекратиться, когда усилие подъемных пружин уравновеситься давлением контактного провода ивесом подвижных частей. Это равновесие упругое:
- при плавных изменениях высоты контактного провода контакт полозов сконтактным проводом сохраняется за счет сжатия и разжатия подъёмных пружин;
- при резких изменениях высоты контактного провода контакт сохраняется за счёт перемещения каретки на 50 мм.
Это перемещение кареток и их давление на провод с усилием 8,5-9 кг обеспечивают горизонтальные пружины кареток. Кроме этого каретки обеспечивают.
• поворот полозов на полозодержателях на 5-8 градусов:
• при нажатии контактным проводом на один из краёв полоза, за счёт соединительной трубки между каретками, восстанавливают горизонтальное положение обоих полозов;
• при нажатии проводом на передней край полоза горизонтальное его положение восстанавливается за счёт оттяжных пружин.
Действие механизма при опускании.Сжатый воздух из цилиндра выпускается в атмосферу клапаном токоприёмника через открытый кран редукционного устройства. Опускающие пружины 6 разжимаются, поршень 9 перемещается вправо и его шток 4 поворачивает рычаг штока 12. Рычаг штока вновь перемещает две тяги. Тяга 10 своей проушиной через кронштейн 22 поворачивает главные валы 11 наружу и растягивает подъёмные пружины. Подвижные рамы 15 и 16 под их действием резко отходят от контактного провода. Тяга 14 поворачивает рукоятку крана 1 редукционного устройства, постепенно перекрывая кран. При равенстве усилий подъёмных и опускающих пружин подвижные рамы опускаются под действием собственного веса. На минимальной высоте 400 мм кран полностью перекрывается и оставшийся воздух выходит в атмосферу через калиброванное отверстие. Подвижные рамы плавно опускаются на амортизаторы.
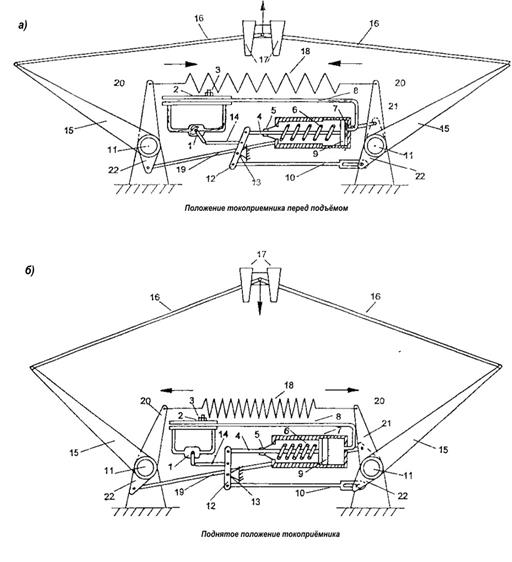
Рисунок 22 Действие токоприёмника при подъеме и опускании подвижных рам
(кинематическая схема)
1–кран редукционного устройства, 2–редукционное устройство, 3–регулировочный винт, 4–шток поршня, 5–чехол из брезента, 6–опускающие пружины, 7–цилиндр привода, 8– подводящая труба, 9–поршень, 10–тяга с проушиной, 11–главные валы, 12–рычаг штока, 13–ось вращения, регулировочная тяга крана 1 редукционного устройства, 15–нижние рамы, 16–верхние рамы,17–полозы, 18–подъемные пружины, 19–тяга, соединяющая главные валы, 20,21,22–кронштейны, приваренные к главным валам 8
Дата добавления: 2017-05-02; просмотров: 2077;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cдвиг ветра. Воздействие на взлёт и посадку ВС. Рекомендации по выполнению полётов и управлению воздушным движением в условиях сдвига ветра.
- Cила резания при точении
- Cущность организации и ее основные признаки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
