КЛАССИФИКАЦИЯ ОБЪЕМНЫХ ПРИВОДОВ
ОБЪЕМНЫЕ ПРИВОДЫ
По ГОСТ 17752-81 под объемным гидро(пневмо)приводом понимается привод, в состав которого входит гидравлический (пневматический) механизм, в котором рабочая среда находится под давлением, с одним или более объемными гидродвигателями (объемными пневмодвигателями). Гидравлическим (пневматическим) механизмом может быть гидронасос, компрессор (в объемном пневмоприводе) или гидро(пневмо)аккумулятор. Рабочей средой в объемном гидроприводе является жидкость, в объемном пневмоприводе – рабочий газ.
Объемным гидро(пневмо)двигателем называется устройство, предназначенное для преобразования энергии потока рабочей среды в энергию выходного звена. В качестве объемных гидро- и пневмодвигателей применяются цилиндры поступательного и поворотного движения, гидро- и пневмомоторы. Выходным звеном цилиндров поступательного действия является шток или плунжер, выходным звеном поворотных цилиндров и моторов является вал.
Как правило, в состав объемного привода входят еще различные гидравлические (пневматические) устройства, предназначенные для выполнения определенных самостоятельных функций посредством взаимодействия с рабочей средой. Совокупность гидро(пневмо)устройств, входящих в состав объемного привода, называется гидро(пневмо)системой.
Все гидро(пневмо)устройства разделены на группы: аппараты, линии, кондиционеры рабочей среды, емкости. Гидро(пневмо)аппараты управляют потоком рабочей среды - изменяют или поддерживают заданным значения давлений или расходов, либо изменяют направление, пуск и остановку рабочей среды. Гидро(пневмо)линии предназначены для движения рабочей среды или передачи давления от одного устройства к другому. Конструктивно линии представляют собой трубы, рукава, каналы и соединения. Кондиционеры рабочей среды предназначены для обеспечения необходимых качественных показателей и состояния рабочей среды. В качестве кондиционеров в объемном гидро(пневмо)приводе применяют: охладители, подогреватели, фильтры, влагоотделители, воздухоосушители, маслораспылители и другие устройства.
Устройства соединяются между собой с помощью различных присоединений: трубных, стыковых, модульных, встраиваемых, вставных и ввертных. Стыковые устройства присоединяются каналами, выведенными на наружную плоскость, по которой происходит стыковка с другим устройством. Модульные устройства соединяются при помощи каналов, выведенных на две параллельные наружные плоскости, по которым происходит стыковка. Корпусные детали встраиваемого устройства являются неотъемлемой частью другого устройства. Вставное и ввертное устройства – это разновидности встраиваемых, первое вставляется, а второе ввертывается в корпус.
КЛАССИФИКАЦИЯ ОБЪЕМНЫХ ПРИВОДОВ
Объемные гидро(пневмо)приводы можно классифицировать по различным признакам, основными из которых являются следующие.
Источник подачи рабочей среды. По этому признаку объемные приводы делят на насосные (компрессорные), аккумуляторные и магистральные. В насосных приводах (рис. 1.1, а) жидкость подается к гидродвигателям с помощью насоса Н, входящего в состав привода. В компрессорном приводе (рис. 1.1, б) сжатый газ подается к пневмодвигателям компрессором К, входящим в состав привода.
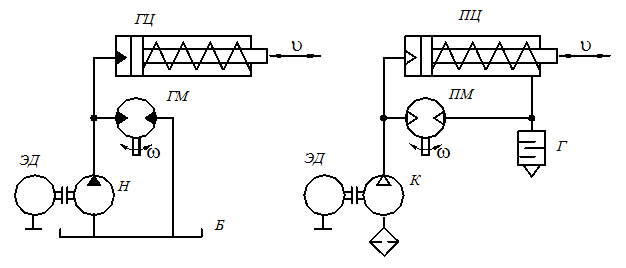
а) б)
Рис. 1.1
В аккумуляторном гидроприводе (пневмоприводе) рабочая среда подается в объемный гидродвигатель (пневмодвигатель) из гидроаккумулятора (пневмоаккумулятора), предварительно заряженного от внешнего источника, не входящего в состав этого привода (рис. 1.2).
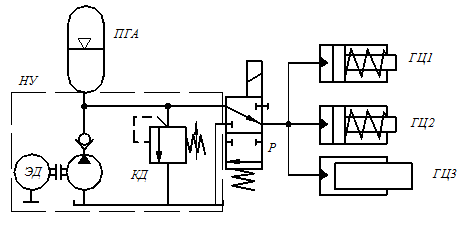
Рис. 1.2
Рабочая среда в гидроцилиндры ГЦ1, ГЦ2 и ГЦ3 подается из пневмогидроаккумулятора ПГА, заряжаемого от насосной установки НУ, отключающейся от гидросистемы после зарядки ПГА. Сжатый газ в объемные пневмодвигатели подается из ресивера, заряжаемого от компрессорной установки, отключающейся от пневмосистемы после зарядки ресивера.
Под пневмомагистралью понимается трубопровод, по которому рабочая среда подается от компрессорной установки к группам объемных пневмодвигателей, которые не связаны между собой конструктивно и могут подключаться или монтироваться независимо друг от друга (рис.1.3).
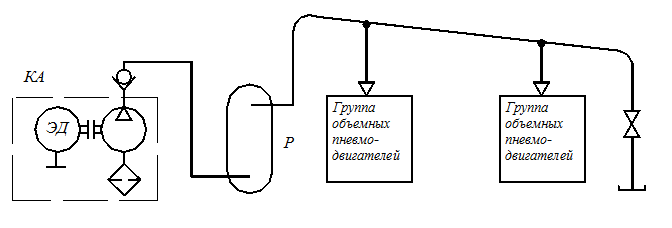
Рис. 1.3
Циркуляция рабочей среды.Насосный (компрессорный) объемный гидропривод и пневмопривод подразделяются на приводы с разомкнутым и замкнутым потоком. В приводе с разомкнутым потоком рабочая среда от объемного гидродвигателя (пневмодвигателя) поступает в гидробак (атмосферу) (рис. 1.1). В приводе с замкнутым потоком рабочая среда от объемного гидродвигателя (пневмодвигателя) поступает на вход насоса (компрессора) (рис. 1.4).
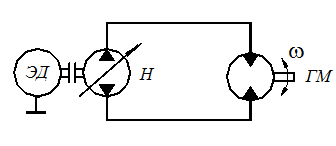
Рис.1.4
Характер движения выходного звена.Объемные гидро(пневмо)приводы по этому признаку делят на приводы поступательного, поворотного и вращательного движения. В приводах поступательного движения объемным гидро(пневмо)двигателем является цилиндр (рис.1.2), в приводах вращательного движения – гидро(пневмо)мотор (рис.1.4), в приводах поворотного движения - поворотный гидро(пневмо)двигатель (рис.1.5).
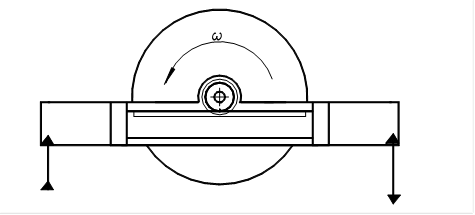
Рис.1.5
По наличию управленияобъемные гидро(пневмо)приводы делят на приводы с управлением и без управления. В приводе без управления (рис.1.6) параметры движения выходных звеньев цилиндров ГЦ1…ГЦ3 постоянны.
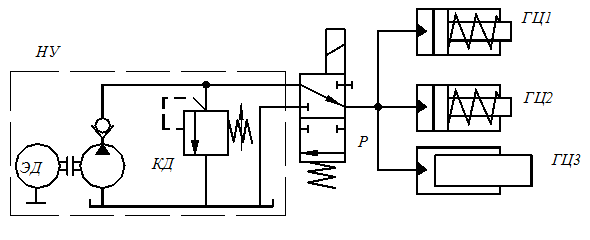
Рис. 1.6
Приводы с управлением подразделяют по двум признакам – по управляющему устройству и по виду управления.
По управляющему устройству:с дроссельным управлением, машинным управлением, машинно-дроссельным управлением, управлением приводящим двигателем и с управлением противодавлением. В приводах с дроссельным управлением параметры движения выходного звена объемного гидро(пневмо)двигателя изменяются регулирующим гидро(пневмо)аппаратом. Таким регулирующим гидроаппаратом, управляющим скоростью движения гидроцилиндра ГЦ , является дроссель Др (рис.1.7).
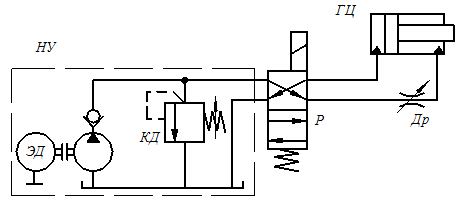
Рис. 1.7
В приводах с машинным регулированием управление параметрами движения выходного звена осуществляется регулируемым насосом или регулируемым гидромотором или обеими объемными гидромашинами. В гидросистеме (рис.1.8) скорость вращения гидромотора ГМ изменяется регулируемым насосом. Н. В приводах с машинно-дроссельным управлением параметры движения выходного звена изменяют регулирующим гидроаппаратом и объемной гидромашиной.
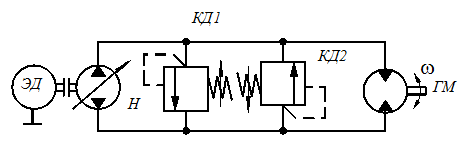
Рис. 1.8
На рис. 1.9 приведен пример гидросистемы, в которой управление параметрами движения выходного звена ГМ осуществляется приводящим двигателем ЭД.
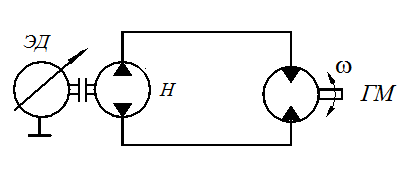
Рис.1.9
В пневмосистемах с управлением противодавлением параметрами движения выходного звена регулируют, создавая противодавление на выхлопе пневмодвигалеля. В пневмосистеме (рис. 1.10) такое управление достигается с помощью клапана давления КД.
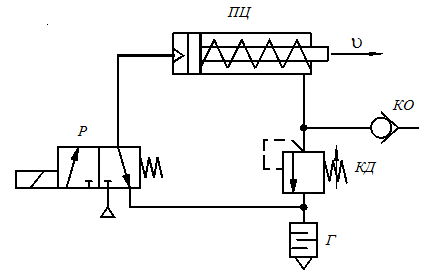
Рис.1.10
По виду управления объемные приводы подразделяют на приводы с ручным и автоматическим управлением. В приводе с ручным управлением (рис.1.7) скорость штока гидроцилиндра регулируется дросселем, настраиваемым вручную. В приводе с автоматическим управлением (рис.1.11) параметры гидроцилиндра ГЦ регулируются автоматически дросселем Др с пропорциональным управлением.
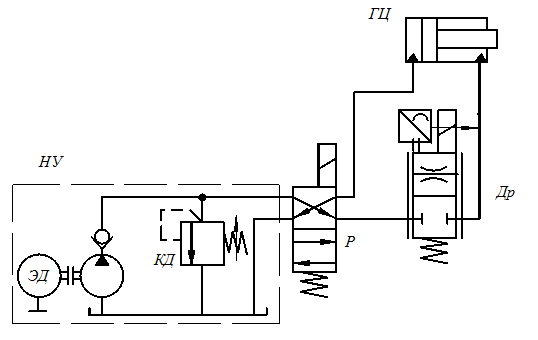
Рис.1.11
Приводы с автоматическим управлением подразделяют на стабилизирующие, программные и следящие, определения которых хорошо известны из теории автоматического управления.
Стабилизирующий гидро(пневмо)привод – привод с автоматическим управлением, в котором регулируемый параметр движения выходного звена поддерживается постоянным.
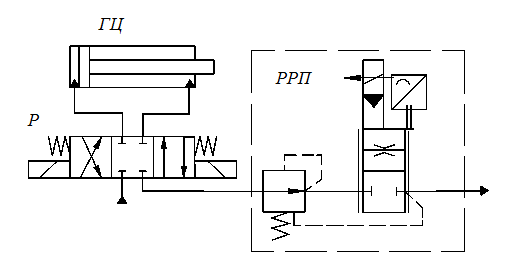
Рис. 1.12
На схеме рис.1.12 скорость штока гидроцилиндра ГЦ управляется регулятором расхода с пропорциональным управлением РРП. При постоянном сигнале управления скорость штока поддерживается постоянной с помощью отрицательных обратных связей по перепаду давления на дросселе пропорционального распределителя.
Программный гидро(пневмо)привод – привод с автоматическим управлением, в котором регулируемый параметр движения выходного звена изменяется по заранее заданной программе.
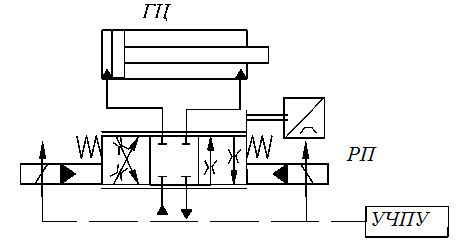
Рис. 1.13
На схеме рис. 1.13 скорость штока гидроцилиндра ГЦ регулируется с помощью распределителя с пропорциональным управлением РП, управляемым от системы числового программного управления УЧПУ.
Следящий гидро(пневмо)привод – привод с автоматическим управлением, в котором регулируемый параметр движения выходного звена изменяется по определенному закону в зависимости от внешнего воздействия, значение которого заранее неизвестно.
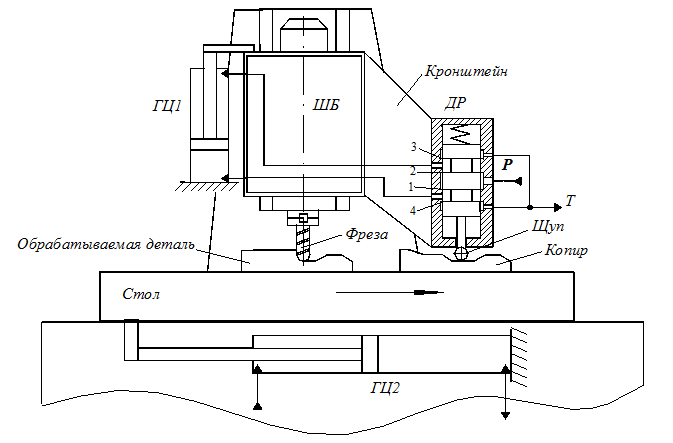
Рис. 1.14
На схеме рис.1.14 представлен фрагмент принципиальной гидравлической схемы копировального фрезерного станка. Выходной орган гидроцилиндра ГЦ1, шток, жестко соединенный с шпиндельной бабкой ШБ, перемещает ее в вертикальной плоскости. При вращении шпинделя и фрезы ГЦ1 осуществляет вертикальную копировальную подачу. Шток гидроцилиндра ГЦ2 жестко соединен со столом станка и перемещает его в горизонтальной плоскости, реализуя продольную подачу обрабатываемой детали и копира. Гидроцилиндр ГЦ1 управляется с помощью четырехщелевого дросселирующего распределителя ДР, состоящего из корпуса, плунжера с щупом и пружины. Корпус ДР жестко соединен с шпиндельной бабкой (жесткая отрицательная обратная связь). В корпусе выполнены три расточки, образующие с торцами поясков плунжера рабочие щели 1…4. Если щуп опустить, то открываются щели 2 и 4.Через щель 2 масло будет подаваться насосом через линию P в верхнюю штоковую камеру гидроцилиндра ГЦ1. Гидроцилиндр будет опускать шпиндельную бабку. При этом через щель 4 масло будет вытесняться из нижней поршневой камеры цилиндра в сливную линию T . Если щуп поднимать, то шпиндельная бабка будет соответственно подниматься, как бы следя за щупом. Такой следящий привод применяется на станках совместно с программным управлением. В данном примере программа обработки детали задана в форме копира, точно повторяющей форму обрабатываемой детали.
Дата добавления: 2019-09-30; просмотров: 1406;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- VI.2. Классификация месторождений нефти и газа
- VI.III. VI. Генетическая классификация складок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
