Построение перспективных изображений автомобильных дорог
С помощью перспективных изображений участка дороги могут быть оценены сочетание дороги с окружающим ландшафтом, обеспечение видимости при совпадении кривых в плане и продольном профиле, выявлено наличие участков с оптическими искажениями вида дороги, излишней волнистостью.
Для построения перспективных изображений дороги используют координатный или панорамный методы, основанные на пересчете пространственных координат любой точки дороги или рельефа местности в координаты ее изображения на картинной поверхности, в качестве которой применяют вертикальную или наклонную плоскость, цилиндрическую или коническую поверхность.
Долгое время для оценки зрительной плавности трассы на этапе проектирования использовали разработанный в 1941 году доктором В.Ранке графо-аналитический метод построения перспективных изображений автомобильных дорог, оказавшийся весьма эффективным. Тем не менее в практике отечественного проектирования дорог в связи с многодельностью и сжатыми сроками проектирования долгое время метод В.Ранке широкого применения не находил, равно как и другие разработанные впоследствии методы (координатный, панорамный, фотографический, полярный и т.д.).
Широкие возможности открылись перед координатным методом построения перспективных изображений полотна автомобильных дорог и прилегающей местности в связи с использованием современной компьютерной техники.
Суть координатного метода построения перспективных изображений автомобильных дорог состоит в том, что для любой точки пространства вычисляют (или задают) ее декартовы координаты, которые затем пересчитывают в перспективные координаты для различных картинных поверхностей: вертикальной или наклонной плоскости, цилиндрической или конической поверхности. Декартову систему координат ориентируют таким образом, чтобы главный луч совпадал с осью проекций П1П2 (рис. 34.1). При этом картинная плоскость П' располагается перпендикулярно главному лучу на расстоянии х от точки зрения С. Аналитическая связь между фактическими координатами точки местности и ее перспективными координатами имеет вид:
 где
где
X, Y, Z - декартовы координаты точки А;
х - расстояние от точки зрения до картинной плоскости по главному лучу;
у, z - перспективные координаты той же точки на картинной плоскости;
К - масштабный множитель.
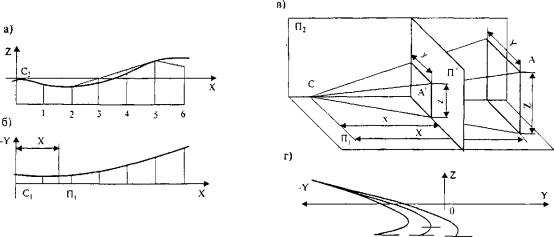
Рис. 34.1. Схема к построению перспективных изображений автомобильной дороги:
а - продольный профиль; б - план; в - расположение картинной плоскости в декартовой системе координат; г - перспективное изображение участка дороги
При построении перспективного изображения дороги и прилегающей местности используют панорамный метод, когда картинную плоскость заменяют цилиндрической поверхностью, а в горных условиях - конической поверхностью. В остальном техника построения перспективных изображений остается прежней.
На основе уже накопленного опыта построения перспективных изображений участков автомобильных дорог выработаны следующие правила.
Местоположение наблюдателя устанавливают на границах архитектурно-ландшафтных бассейнов вблизи переломов продольного профиля в конце вертикальной выпуклой кривой со смещением точки зрения в сторону вершины кривой на 100-200 м, а также на участках дорог перед местами с ограниченной видимостью на расстоянии, равном расчетному расстоянию видимости при обгоне. При этом точку зрения размещают в 2,0-х м от правой кромки проезжей части на высоте 1,2 м над поверхностью дороги (Орнатский Н.П. Выбор точки зрения для построения перспективы автомобильной дороги: Сб. науч. тр./ МАДИ. - М., 1972. - Вып. 37. - С. 33-40);
Расстояние от точки зрения до картинной плоскости принимают х = 100 см, а главный луч принимают горизонтальным при небольших продольных уклонах и параллельным среднему уклону на затяжных подъемах (спусках);
При наличии поворота дороги главный луч смещают в сторону центра закругления, при этом положение главного луча устанавливают согласно схеме, представленной на рис. 34.2. Положение точки 2 устанавливают по расстоянию до зоны концентрации внимания водителя, определяемому по эмпирической формуле:
Lкв = 4V, где (34.1)
V - скорость движения автомобиля, км/ч.
Следует иметь в виду, что формула (34.1) действительна при V ³ 60 км/ч.
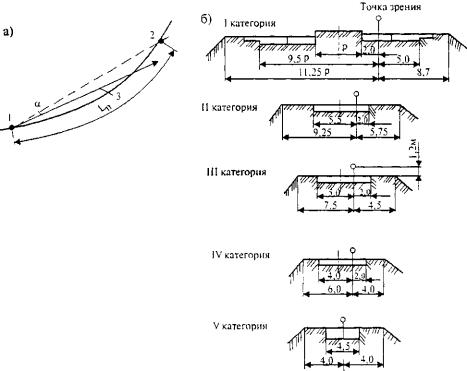
Рис. 34.2. Схема к определению положения главного луча и точки зрения водителя:
а - на закруглении в плане; б - в поперечном профиле
Главный луч 3 в плане делит пополам угол острого зрения, т.е. расположен на 10° в сторону от хорды 1-2 (см. рис. 34.2).
В ряде программных комплексов для автоматизированного проектирования автомобильных дорог, например, «Сгеао», «IndorCAD/Road», предусмотрена возможность получения перспективного изображения участка дороги как в статическом, так и в динамическом режимах просмотра.
В статическом режиме проектировщик может вызвать на экран монитора или вычертить перспективное изображение участка дороги при расположении наблюдателя в определенном задаваемом створе дороги. Динамический режим просмотра заключается в создании фильма, имитирующего картину, которую видит водитель в процессе проезда автомобиля по запроектированной дороге. Для этого создают серии перспективных изображений с определенными интервалами между точками зрения наблюдателя, т.е. получают набор слайдов, показываемых с частотой, зависящей от скорости движения автомобиля.
Исходными данными для построения перспективных изображений дороги являются результаты выполненных в САПР-АД проектных решений: цифровая модель местности; план трассы; продольный профиль; поперечные профили земляного полотна; ширина проезжей части, обочин и разделительной полосы.
Эти данные при расчете координат перспективных изображений не требуют дополнительной обработки и ввода, так как выбираются автоматически из файлов, созданных на предыдущих этапах проектирования.
Однако необходим ввод дополнительной информации: местоположение наблюдателя (ПК +), направление просмотра (вперед по ходу пикетажа или назад), высота глаза наблюдателя (водителя) над поверхностью проезжей части (в некоторых программах по умолчанию этот параметр принят равным 1,2 м). Для этого проектировщик может использовать функциональные клавиши, описание которых отображается на экране монитора вместе со схематическими изображениями плана и продольного профиля дороги.
В программном комплексе «IndorCAD/Road» в случае необходимости могут быть введены данные, характеризующие расположенные рядом с дорогой здания (пикетажные положения, размеры, расстояние от дороги, этажность) и элементы обустройства (например, для дорожных знаков - пикетажное положение, расстояние от дороги и номер знака).
В результате расчетов на экран выдаются перспективные изображения участка дороги по ведущим линиям и прилегающего ландшафта (ось дороги, кромки проезжей части, бровки земляного полотна, подошва насыпи, внешние бровки выемок или боковых канав), поверхностей откосов и элементов рельефа. На экране также указывается пикетажное положение створа, в котором находится наблюдатель, высота точки зрения наблюдателя над поверхностью проезжей части и расстояние видимости поверхности дороги.
В программном комплексе «IndorCAD/Road» в состав перспективного изображения могут также входить изображения расположенных рядом с дорогой зданий и элементов обустройства дороги.
При просмотре фильма, моделирующего движение автомобиля по дороге, на экране дополнительно на совмещенных схемах плана и продольного профиля дороги указывается положение автомобиля в данный момент времени.
В результате просмотра перспективных изображений дороги могут быть выявлены участки с необеспеченной видимостью, оптическими искажениями вида дороги, излишней волнистостью, требующие корректировки проектных решений. После внесения необходимых изменений в план трассы, продольный профиль, конструкцию земляного полотна для получения новых перспективных изображений нет необходимости во вводе дополнительных данных.
Дата добавления: 2017-03-12; просмотров: 1973;
Поиск по сайту
Узнать еще
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- II. Построение продольного профиля по оси трассы
- XXXI. ПОДВЕСНЫЕ МОНОРЕЛЬСОВЫЕ ДОРОГИ
- Автомобильные дороги
- Автомобильные дороги: определение группы сооружений, основные конструктивные элементы
- Анализ возмущений сингулярных векторов матриц (блоков матриц) цифровых изображений при разных возмущающих воздействиях
- Анализ возмущений сингулярных спектров цифровых изображений при различных возмущающих воздействиях
- Аппаратные средства для получения цифровых изображений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
