Структура системы дистанционной передачи информации

Как уже было указано выше, ИД может содержать в своём составе два или три феррозонда, каждый из которых измеряет составляющую магнитного поля картушки вдоль оси своих сердечников. Он размещается в котелке МК под картушкой (рис. 2.4) и вместе с котелком ориентируется требуемым образом относительно диаметральной плоскости судна.
Если используется двухзондовый ИД, то ось чувствительности одного зонда устанавливается вдоль диаметральной плоскости, а другого перпендикулярно ей. В этом случае зонд 1 (рис. 2.18) будет измерять продольную составляющую Х поля картушки, а зонд 2 – поперечную Y. Сигнальные обмотки зондов связаны со статорными обмотками синусно-косинусного вращающегося трансформатора (СКВТ). Получая от зондов напряжение, пропорциональное указанным компонентам магнитного поля картушки, эти обмотки создают внутри СКВТ ортогональные магнитные потоки Ф1 и Ф2, образующие в сумме магнитный поток, ориентация вектора Ф которого внутри статора определяется положением картушки относительно диаметральной плоскости судна. Магнитный поток Ф индуктирует в обмотках ротора СКВТ напряжения, которые будут зависеть как от величины потока, так и направления вектора Ф относительно плоскости роторных обмоток. Если плоскость обмотки ротора параллельна вектору Ф, то ЭДС, индуктированная в ней, при любом значении его модуля будет равна нулю. Таким образом, устанавливая ротор СКВТ в такое положение, когда на одной из его обмоток сигнал постоянно будет равен нулю, мы будем отслеживать изменение ориентации картушки относительно диаметральной плоскости судна.
С этой целью, сигнал с роторной обмотки СКВТ после его усиления усилителем А поступает на двигатель Д, который через редуктор Р поворачивает ротор СКВТ. Когда сигнал, поступающий на двигатель, станет равным нулю, вращение ротора прекратится.
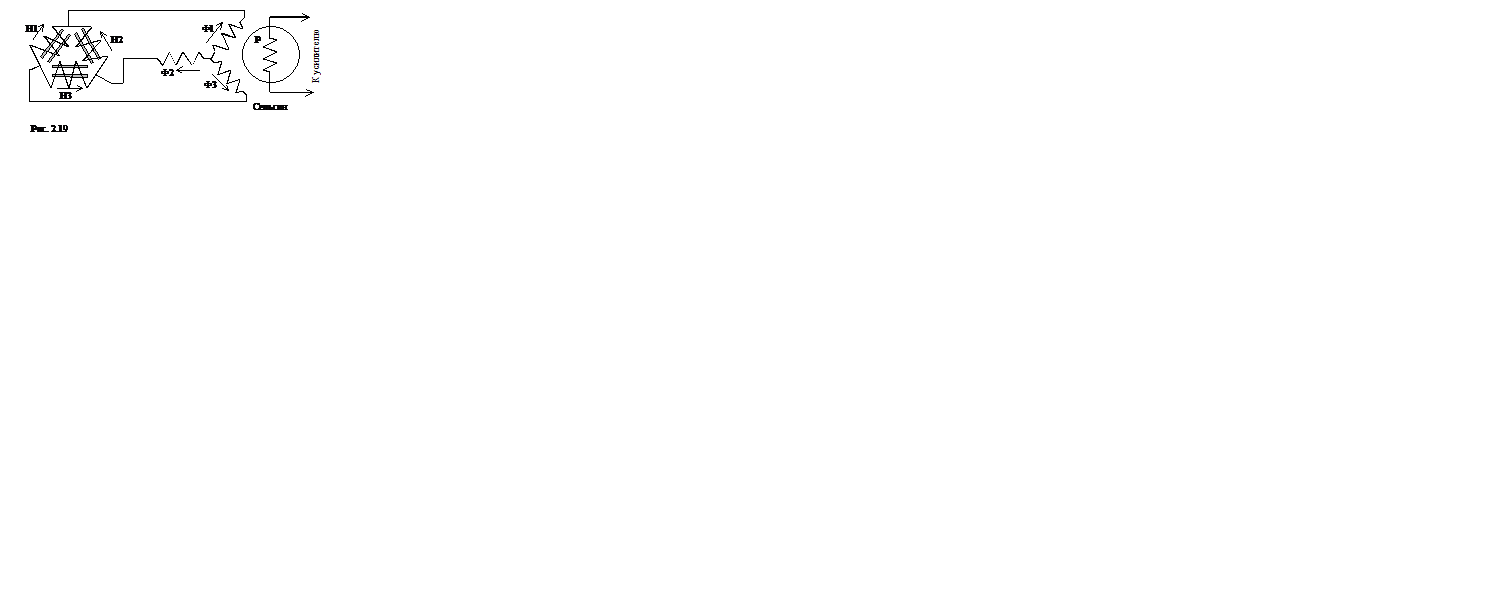
В трёхзондовом датчике оси зондов образуют равносторонний треугольник (рис. 2.19). Их обмотки подмагничивания (на рисунке эта часть схемы не показана) включаются последовательно и питаются от специального генератора переменного тока. Сигнальные обмотки соединены в треугольник и подключены к статорным обмоткам сельсина. В рассматриваемом случае измеряются три составляющие Н1, Н2 и Н3 магнитного поля, образованного картушкой компаса. Напряжения, пропорциональные измеренным компонентам, создают в сельсине три магнитных потока Ф1, Ф2 и Ф3. Направление вектора напряженности результирующего поля, образованного указанными потоками, будет, как и в предыдущем случае, определяться текущей ориентацией картушки МК. Ротор сельсина с помощью следящей системы, аналогичной рассмотренной выше, будет приводиться в состояние, при котором сигнал, снимаемый с его обмотки, будет равен нулю. Таким образом, осуществляется отслеживание поворотов картушки компаса и, как следствие, изменения курса судна.
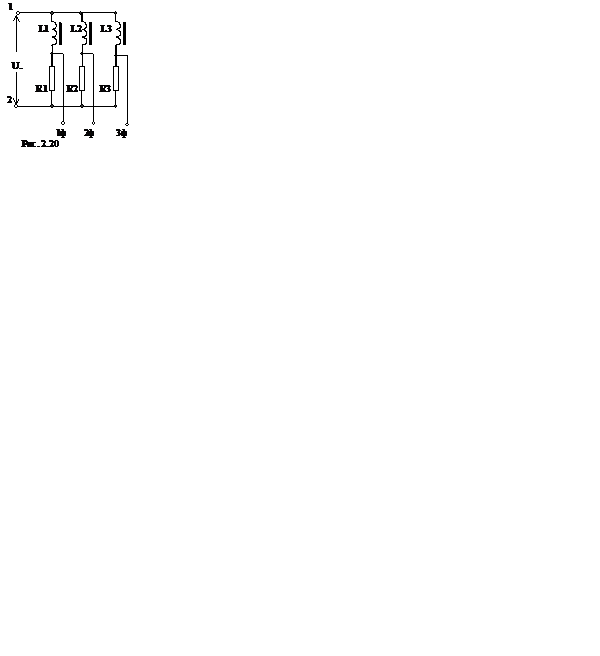
Наряду с описанными вариантами, могут использоваться датчики, в которых магнитный зонд имеет одну обмотку и является, по существу, переменным индуктивным сопротивлением. Величина указанного сопротивления зависит от степени подмагничивания сердечника полем магнитов картушки. Электрическая схема такого датчика показана на рис. 2.20. Сердечники зондов L1…L3 повернуты в пространстве друг относительно друга на угол, равный 1200, аналогично тому, как это имело место в рассмотренном выше трехзондовом ИД. Степень их намагниченности, а, следовательно, и величина индуктивного сопротивления обмоток, будет зависеть от ориентации зондов по отношению к картушке МК. Напряжения на резисторах R1…R3 определяются разностью напряжения U~ и падений напряжений на обмотках феррозондов. В связи с тем, что их векторы развернуты друг относительно друга на угол 1200, то в совокупности они представляют собой трехфазное напряжение, которое может быть использовано для дистанционной передачи информации системой, аналогичной рассмотренной выше.
На этом принципе фирмой Анщютц разработан магнитный зонд типа 108-010, который может быть смонтирован на любой компас, не имеющий встроенной электромеханической дистанционной передачи. Зонд может быть установлен на котелке 6 компаса как сверху, так и снизу (Рис. 2.21). Для центрирования установочной шайбы 3 относительно шкалы кар 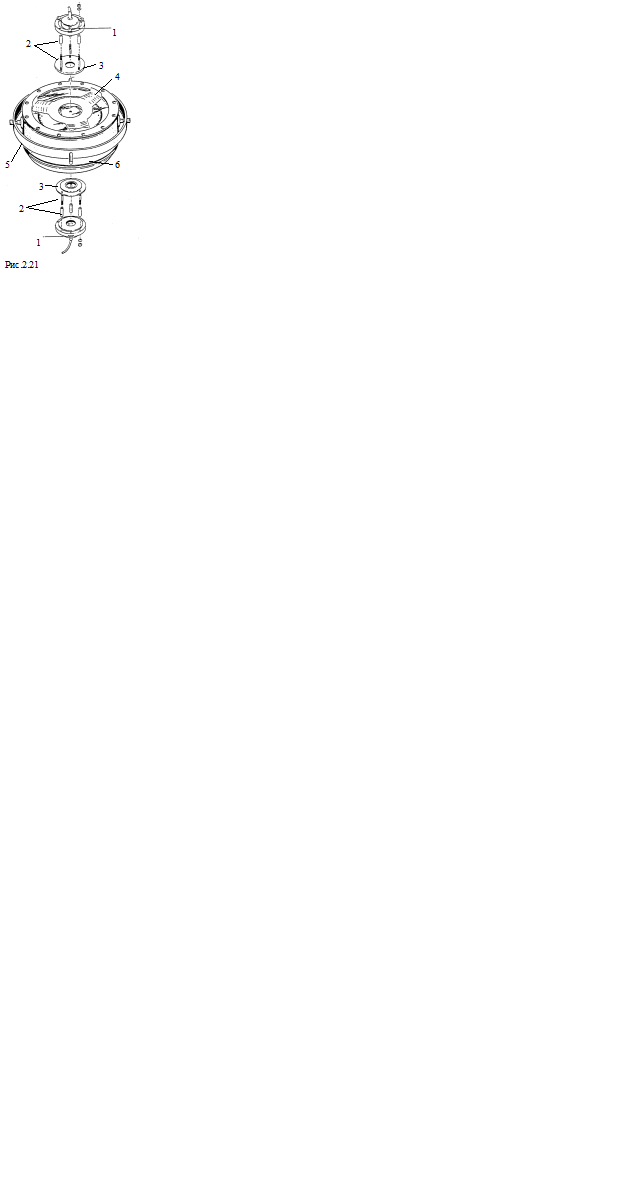 тушки используется специальная накладка 4, которая после наклеивания шайбы на стекло удаляется. К установочной шайбе с помощью шпилек 2 крепится магнитный зонд 1. Сам котелок располагается, как обычно, в кольце 5 карданова подвеса. Общий вид котелка компаса с установленным на нем зондом 1 показан на рис. 2.22.
тушки используется специальная накладка 4, которая после наклеивания шайбы на стекло удаляется. К установочной шайбе с помощью шпилек 2 крепится магнитный зонд 1. Сам котелок располагается, как обычно, в кольце 5 карданова подвеса. Общий вид котелка компаса с установленным на нем зондом 1 показан на рис. 2.22.
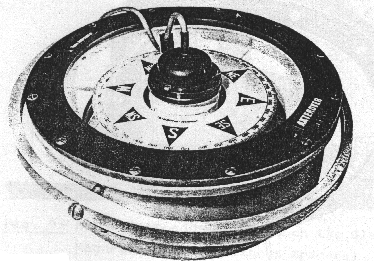
| Рис.2.22 |
Индукционные МК
Дата добавления: 2017-02-13; просмотров: 2314;
Поиск по сайту
Узнать еще
- a-спираль b-складчатая структура
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
