Обобщенный состав системы управления.
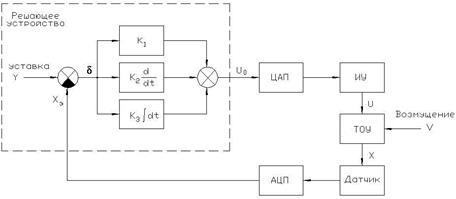
Как известно, любая система управления включает в себя четыре основных компонента: решающее устройство (РУ), датчики (Д), исполнительные устройства (ИУ) и технологический объект управления (ТОУ), соединенные между собой в соответствии с принципом обратной связи (см. рис.50). Функция U0 = f(хэ,Y), реализуемая РУ для оптимального (в некотором смысле) поддержания состояния Х (управляемые параметры) ТОУ в соответствии с уставкой Y (целью), называется законом управления, а функция х = φ(U,V), связывающая отклик ТОУ на управляющее воздействие (управляющие параметры) U - моделью ТОУ. Датчики регистрируют и преобразуют управляемые параметры X в сигналы Хэ, воспринимаемые РУ, где D(x) - калибровочная функция (модель датчика). ИУ выполняют "обратные" по отношению к датчикам действия, т.е. преобразуют управляющие сигналы U0 РУ во входные воздействия U на ТОУ, изменяющие его состояние.

| 
|
| Рис.50 | Рис.51 |
Установлено, что в большинстве практических случаев в качестве f(x) может быть выбрана аддитивная пропорционально-интегрально-дифференциальная функция (ПИД-закон)
 , (3)
, (3)
где d = Y - хэ - отклонение от уставки Y (ошибка); ki – коэффициенты пропорциональности. Значения коэффициентов определяются методом оптимизации из целевой функции и уравнения, описывающего контур управления.
Таким образом, для построения МПС управления ТОУ необходимо определить математическую модель ТОУ, целевую функцию управления, выбрать датчик и ИУ с подходящими функциями преобразования, построить закон управления и реализовать его в программе МПС.
Дата добавления: 2017-02-13; просмотров: 1712;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
