Волновые зубчатые передачи
Волновая зубчатая передача — механизм, содержащий зацепляющиеся между собой гибкое и жесткое зубчатые колеса и обеспечивающий преобразование и передачу движения благодаря деформированию гибкого колеса (рис. 19.1).
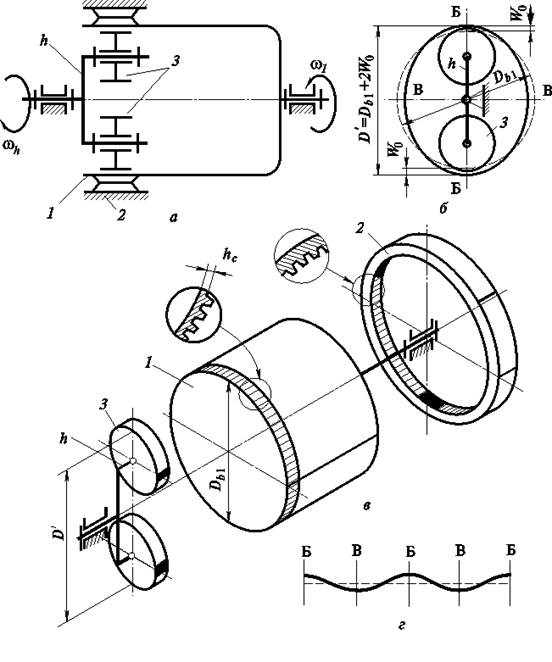
Рис. 19.1
Волновая зубчатая передача (ВЗП) состоит из трех основных элементов: гибкого колеса 1 (рис. 19.1, а, б, в), жесткого колеса 2 и генератора волн h. Ее можно рассматривать как конструктивную разновидность планетарной передачи с внутренним зацеплением, характерной особенностью которой является использование сателлита (гибкого колеса), деформируемого в процессе передачи движения. Гибкое зубчатое колесо представляет собой тонкостенную оболочку, один конец которой соединен с валом и сохраняет цилиндрическую форму, а на другом нарезан зубчатый венец с числом зубьев  . При сборке этот конец оболочки деформируется на
. При сборке этот конец оболочки деформируется на  генератором волн. Контур деформированного гибкого колеса образует относительно недеформированного две волны деформации (рис. 19.1, г). Размер по сечению Б – Б называют большой осью, а по В – В — малой осью кривой деформации. В зоне большой оси деформации происходит зацепление зубьев гибкого и жесткого колес. Для обеспечения симметрии нагружения волновой зубчатой передачи обычно используют две волны деформации и четные числа зубьев колес, которые связаны соотношением
генератором волн. Контур деформированного гибкого колеса образует относительно недеформированного две волны деформации (рис. 19.1, г). Размер по сечению Б – Б называют большой осью, а по В – В — малой осью кривой деформации. В зоне большой оси деформации происходит зацепление зубьев гибкого и жесткого колес. Для обеспечения симметрии нагружения волновой зубчатой передачи обычно используют две волны деформации и четные числа зубьев колес, которые связаны соотношением  .
.
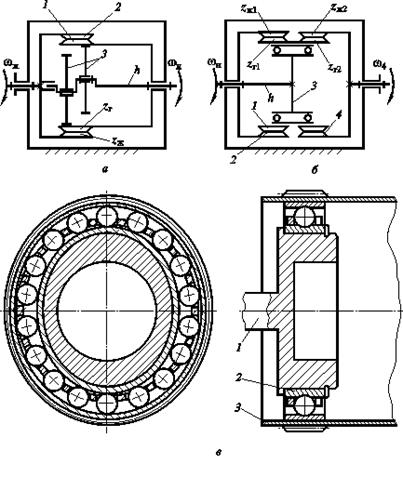
Рис. 19.2
Гибкое колесо 1 поджато к жесткому 2 роликами 3, расположенными на водиле h. Такой генератор называют роликовым. Роликовый генератор волн может быть преобразован в дисковый генератор волн при значительном увеличении диаметров роликов 3 (рис. 19.2, а) и расположении их в параллельных плоскостях. Чтобы задать зубчатому венцу гибкого колеса определенную принудительную форму деформации, генератор нужно выполнить в виде симметричного кулачка специального профиля. Такой генератор называют кулачковым (рис. 19.2, в). На кулачок 1 напрессовывают гибкий подшипник 2, чтобы уменьшить трение между гибким колесом 3 и генератором волн. Дисковые и кулачковые генераторы волн применяют в высоко нагруженных передачах. Кроме механических генераторов волн применяют также электромагнитные, пневматические и гидравлические генераторы.
Кинематика волновой передачи. При вращении генератора волн обе волны деформации перемещаются по периметру гибкого колеса. В результате каждый зуб гибкого колеса за один оборот генератора волн дважды входит в зацепление с зубьями жесткого колеса. Если числа зубьев колес равны  и , а угловые шаги
и , а угловые шаги  и
и  , то передаточное отношение такой передачи можно подсчитать следующим образом. При остановленном жестком колесе после полного оборота генератора волн
, то передаточное отношение такой передачи можно подсчитать следующим образом. При остановленном жестком колесе после полного оборота генератора волн  вал гибкого колеса повернется в противоположном движению генератора направлении на угол, равный
вал гибкого колеса повернется в противоположном движению генератора направлении на угол, равный  .
.
Переходя от углов поворота к угловым скоростям, получаем передаточное отношение ВЗП от генератора волн к гибкому колесу при неподвижном жестком:
 . (19.1)
. (19.1)
В ВЗП с остановленным гибким колесом при повороте генератора волн на угол  жесткое колесо повернется в том же направлении на угол
жесткое колесо повернется в том же направлении на угол  . В этом случае передаточное отношение от генератора волн к жесткому колесу при неподвижном гибком
. В этом случае передаточное отношение от генератора волн к жесткому колесу при неподвижном гибком
 . (19.2)
. (19.2)
Волновая передача может быть двухступенчатой (рис. 19.2, б). В этом случае гибкое колесо 1 выполняется в виде кольца с двумя зубчатыми венцами  и
и  , которые входят в зацепление с жесткими колесами 2 и 4, имеющими соответственно
, которые входят в зацепление с жесткими колесами 2 и 4, имеющими соответственно  и
и  зубьев. Если жесткое колесо 2 неподвижно, то движение от вала генератора волн преобразуется с помощью двух волновых зацеплений и передается на выходной вал, соединенный с жестким колесом 4. Передаточное отношение двухступенчатой ВЗП определяется формулой
зубьев. Если жесткое колесо 2 неподвижно, то движение от вала генератора волн преобразуется с помощью двух волновых зацеплений и передается на выходной вал, соединенный с жестким колесом 4. Передаточное отношение двухступенчатой ВЗП определяется формулой
 . (19.3)
. (19.3)
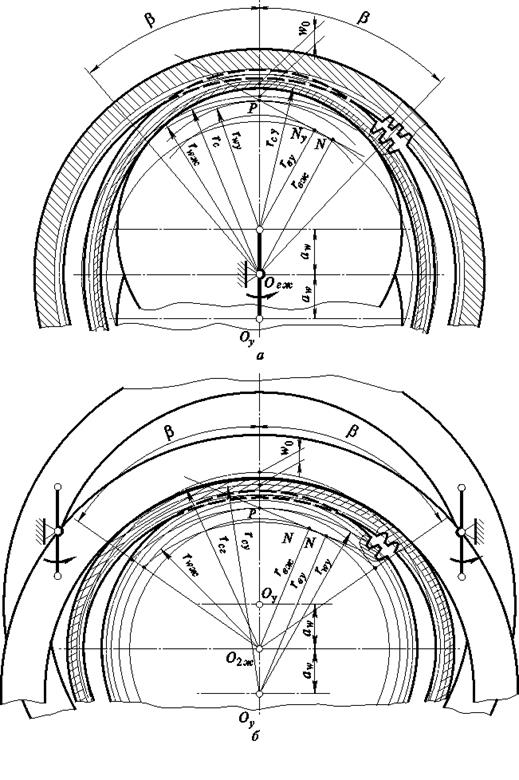
Особенности волнового зацепления. Гибкое колесо ВЗП при его нагружении изменяет свою начальную форму. Это происходит из-за наличия зазоров и упругости элементов, взаимодействующих с гибким колесом. Изменение формы гибкого колеса 1 ограничено с внешней стороны жестким колесом 2, а с внутренней генератором волн h. Гибкое колесо, опирающееся на генератор волн в пределах участков постоянной кривизны  (рис. 19.3), стремится принять форму жесткого колеса. С увеличением момента закручивающего гибкое колесо зоны выбранных зазоров в зацеплении увеличиваются, что приводит к увеличению числа пар зубьев в зацеплении. Благодаря многопарности зацепления (нагрузку могут передавать до 40 % всех пар зубьев) нагрузочная способность ВЗП выше, чем планетарной. КПД волновой передачи также выше, потому что в зацеплении зубья почти не перемещаются при прилегании гибкого колеса к жесткому. При стальных гибких колесах в одноступенчатых волновых передачах можно получить передаточное отношение 60 – 320, а КПД равным 0,85...0,80. Двухступенчатые ВЗП обеспечивают передаточные отношения от
(рис. 19.3), стремится принять форму жесткого колеса. С увеличением момента закручивающего гибкое колесо зоны выбранных зазоров в зацеплении увеличиваются, что приводит к увеличению числа пар зубьев в зацеплении. Благодаря многопарности зацепления (нагрузку могут передавать до 40 % всех пар зубьев) нагрузочная способность ВЗП выше, чем планетарной. КПД волновой передачи также выше, потому что в зацеплении зубья почти не перемещаются при прилегании гибкого колеса к жесткому. При стальных гибких колесах в одноступенчатых волновых передачах можно получить передаточное отношение 60 – 320, а КПД равным 0,85...0,80. Двухступенчатые ВЗП обеспечивают передаточные отношения от  до
до  и более при КПД от 0,7 до 0,1.
и более при КПД от 0,7 до 0,1.
|
Многопарность и многозонность волнового зацепления приводят к значительному усреднению ошибок изготовления и сборки, в результате чего обеспечивается высокая кинематическая точность ВЗП.
Относительно небольшая величина радиальной деформации гибкого колеса позволяет выполнить его в виде колоколообразной оболочки и изготовить герметичные ВЗП, передающие вращение через герметичную перегородку без подвижных уплотнений.
Наиболее ответственные детали ВЗП — гибкий подшипник и гибкое колесо. Гибкое колесо имеет тонкостенное донышко, допускающее осевые перемещения торца цилиндрической оболочки при ее деформировании с другого края. Длину гибкого колеса выбирают от  до
до  , где
, где  — диаметр недеформированной серединной поверхности гибкого колеса. Толщину
— диаметр недеформированной серединной поверхности гибкого колеса. Толщину  гибкого колеса под зубчатым венцом выбирают примерно равной
гибкого колеса под зубчатым венцом выбирают примерно равной  .
.
Методика проектирования ВЗП. Существует несколько методов расчета геометрических параметров волновых зубчатых передач. Настоящая методика, разработанная на кафедре теории механизмов и машин МГТУ им. Н.Э. Баумана, основывается на предположении, что конструкции генераторов волн рассматриваемых передач обеспечивают постоянную кривизну серединного слоя деформированного гибкого колеса в пределах зон зацепления, ограниченных центральными углами (см. рис. 19.3, а). Вне этих зон гибкое колесо имеет свободную форму деформации. На участке постоянной кривизны зацепление в волновой передаче рассматривается как внутреннее эвольвентное зацепление жесткого колеса с числом зубьев  и условного, имеющего параметры гибкого и расчетное число зубьев
и условного, имеющего параметры гибкого и расчетное число зубьев  .
.
Исходными параметрами для расчета являются передаточное отношение передачи, ее схема, номинальный крутящий момент на выходном валу, частота вращения генератора волн, срок службы передачи, прочностные характеристики гибкого колеса. Проектировочный расчет заключается в определении диаметра серединной поверхности гибкого колеса по изгибной прочности, из расчета на выносливость или из расчета заданного коэффициента крутильной жесткости [16]. Больший из вычисленных диаметров берется за основу для определения модуля зацепления  , который округляется до ближайшего стандартного значения.
, который округляется до ближайшего стандартного значения.
Делительные диаметры колес и толщина обода гибкого колеса под зубчатым венцом определяются по формулам
 (19.4)
(19.4)
Основным варьируемым параметром является относительная радиальная деформация гибкого колеса по большой оси:
 , (19.5)
, (19.5)
где  — коэффициент относительной радиальной деформации.
— коэффициент относительной радиальной деформации.
Расчетное число зубьев условного колеса равно
 . (19.6)
. (19.6)
В формуле (19.6), как и во всех последующих, содержащих двойные знаки арифметических действий, верхний знак относится к внутреннему деформированию гибкого колеса дисковым или кулачковым генератором волн, нижний — к внешнему деформированию кольцевым генератором (рис. 19.3, б):
 , (19.7)
, (19.7)
где  — угловая координата участка постоянной кривизны (
— угловая координата участка постоянной кривизны (  ).
).
Далее определяем радиус серединной окружности деформированного гибкого колеса (см. рис. 19.3):
 , (19.8)
, (19.8)
где  ,
,  — параметры исходного контура;
— параметры исходного контура;  — коэффициент смещения исходного контура:
— коэффициент смещения исходного контура:
 , (19.9)
, (19.9)
 — коэффициент смещения.
— коэффициент смещения.
При изменении величин ,  и
и  в указанных диапазонах их возможного изменения можно провести оптимизацию качества зацепления. Целевой функцией является теоретический коэффициент перекрытия.
в указанных диапазонах их возможного изменения можно провести оптимизацию качества зацепления. Целевой функцией является теоретический коэффициент перекрытия.
Радиус серединной окружности недеформированного гибкого колеса
 . (19.10)
. (19.10)
Межосевое расстояние передачи, равное эксцентриситету установки деформирующих дисков, равно
 . (19.11)
. (19.11)
Тогда угол зацепления волновой передачи
 . (19.12)
. (19.12)
Жесткое колесо в передачах с дисковым или кулачковым генератором внутреннего деформирования, имеющее внутренние зубья, обрабатывается долбяком с числом зубьев  . Угол станочного зацепления жесткого колеса и долбяка
. Угол станочного зацепления жесткого колеса и долбяка
 , (19.13)
, (19.13)
и коэффициент смещения жесткого колеса
 . (19.14)
. (19.14)
Остальные параметры и исполнительные размеры элементов волновой передачи рассчитывают так же, как зубчатой передачи внутреннего эвольвентного зацепления.
Области применения ВЗП. Отмеченные достоинства волновой передачи определяют наиболее рациональные области ее применения: силовые и кинематические приводы общего назначения с большим передаточным отношением, задающие и исполнительные механизмы повышенной кинематической точности, быстродействующие приводы систем автоматического управления и регулирования, электромеханические приводы промышленных роботов, приводы для передачи движения в герметизированное пространство в химической, атомной и космической технике.
| <== предыдущая лекция | | | следующая лекция ==> |
| Подбор чисел зубьев по методу сомножителей. | | | Коническая зубчатая передача. |
Дата добавления: 2017-02-13; просмотров: 4857;
Поиск по сайту
Узнать еще
- XIV. ОСНОВЫ МАССОПЕРЕДАЧИ
- Аналоговые системы передачи
- Ваше мнение: какой основной недостаток имеют зубчатые соединения?
- Виды каналов передачи данных
- Виды передачи теплоты
- Воздействие импульсов на генераторы и волновые процессы в обмотках
- Воздушные и кабельные линии электропередачи
- Воздушные линии электропередачи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
