Кинематика входных и выходных звеньев.
Кинематические характеристики механизмов.
Основным назначением механизма является выполнение им требуемых движений. Эти движения могут быть описаны посредствам его кинематических характеристик. К ним относят координаты точек и звеньев, их траектории, скорости и ускорения. К числу кинематических характеристик относятся и такие характеристики, которые не зависят от закона движения начальных звеньев, и определяются только строением механизма и размерами его звеньев и в общем случае зависят от обобщенных координат. Это – функции положения, кинематические передаточные функции скорости и ускорения.
Для создания механизмов, наилучшим образом отвечающих поставленным требованиям, надо знать методы определения кинематических характеристик механизмов.
Различают следующие методы определения кинематических характеристик механизмов.
1. Геометрический – основанный на анализе векторных контуров кинематических цепей механизмов, представленных в аналитическом или графическом виде;
2. Метод преобразования координат точек механизма, решаемый в матричной или тензорной форме, (обычно применяется для исследования кинематических цепей манипуляторов промышленных роботов с использованием ЭВМ);
3. Метод кинематических диаграмм – метод численного интегрирования и дифференцирования, (решаемый с помощью ЭВМ или графически);
4. Метод планов положений, скоростей и ускорений, основанный на решении векторных уравнений связывающих кинематические параметры, решаемых в графическом виде или аналитической форме;
5. Экспериментальный метод.
Кинематика входных и выходных звеньев.
|
 |
Число независимых друг от друга кинематических параметров механизма с заданными размерами звеньев и структурной схемой равно числу степеней свободы механизма или числу обобщенных координат механизма.
|
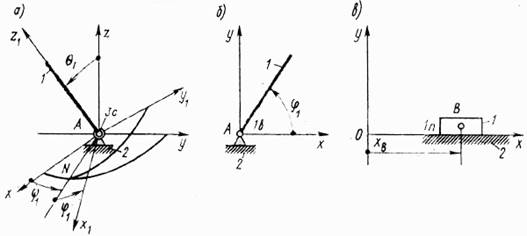
 Звено, которому приписывается одна или несколько обобщенных координат, называют начальным звеном. Например, звено 1 вращающееся вокруг неподвижной точки, т.е. образующее со стойкой 2 сферическую кинематическую пару (рис. 5.1, а), имеет три степени свободы и его положение определяется тремя параметрами - тремя углами Эйлера:
Звено, которому приписывается одна или несколько обобщенных координат, называют начальным звеном. Например, звено 1 вращающееся вокруг неподвижной точки, т.е. образующее со стойкой 2 сферическую кинематическую пару (рис. 5.1, а), имеет три степени свободы и его положение определяется тремя параметрами - тремя углами Эйлера:  . Звено 1, вращающееся вокруг неподвижной оси, т. е. образующее со стойкой 2 вращательнуюкинематическую пару (рис. 5.1, б), имеет одну степень свободы и его положение определяется одним параметром, например угловой координатой
. Звено 1, вращающееся вокруг неподвижной оси, т. е. образующее со стойкой 2 вращательнуюкинематическую пару (рис. 5.1, б), имеет одну степень свободы и его положение определяется одним параметром, например угловой координатой  . Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром - координатой
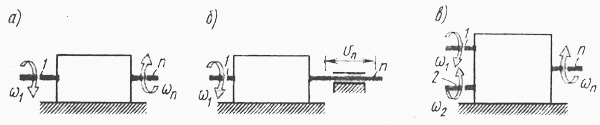
. Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром - координатой  .Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) иливходных звеньев (рис. 5.2, в) в требуемые движения звеньев, для выполнения которых предназначен механизм. Входному звену механизма с одной степенью свободы обычно присваивают номер 1, а выходному звену - номер п, промежуточным звеньям - порядковые номера: 2, 3,..., i,... п - 1.
.Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) иливходных звеньев (рис. 5.2, в) в требуемые движения звеньев, для выполнения которых предназначен механизм. Входному звену механизма с одной степенью свободы обычно присваивают номер 1, а выходному звену - номер п, промежуточным звеньям - порядковые номера: 2, 3,..., i,... п - 1.
Во многих случаях при проектировании машин и механизмов закон изменения обобщенных координат в функции времени удается определить только на последующих стадиях проектирования, обычно после динамического исследования движения агрегата с учетом характеристик сил, приложенных к звеньям механизма, масс и моментов инерции звеньев. В таких случаях движение выходных и промежуточных звеньев определяется в два этапа: на первом устанавливаются зависимости кинематических параметров звеньев и точек от обобщенной координаты, т. е. определяются относительные функции (функции положения и передаточные функции механизма), а на втором - определяются закон изменения обобщенной координаты от времени и зависимости кинематических параметров, выходных и промежуточных звеньев от времени.
Функцией положения механизма называется зависимость углового или линейного перемещения точки или звена механизма от времени или обобщенной координаты.
Кинематическими передаточными функциями механизма называется производные от функции положения по обобщенной координате. Первая производная называется первой передаточной функцией или аналогом скорости (обозначаются  ;
;  ), вторая производная – второй передаточной функцией или аналогом ускорения (обозначаются
), вторая производная – второй передаточной функцией или аналогом ускорения (обозначаются  ).
).
Кинематическими характеристиками механизманазываются производные от функции положения по времени. Первая производная называется скоростью (обозначают  ), вторая – ускорение (обозначают
), вторая – ускорение (обозначают  )
)
Связь между скоростью  (или ускорением
(или ускорением  ) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости
) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости  (или ускорения
(или ускорения  ) той же точки определяется следующими соотношениями:
) той же точки определяется следующими соотношениями:

Дата добавления: 2017-02-13; просмотров: 1288;
Поиск по сайту
Узнать еще
- III.1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
- Анализ выходных процессов
- Анализ выходных процессов
- Виды выходных функций.
- Внешнее сопротивление сверхзвуковых входных устройств
- ВОПРОС 48. КИНЕМАТИКА И ДИНАМИКА В ЦЕПНОЙ ПЕРЕДАЧЕ.
- Вынужденные процессы при степенных входных воздействиях.
- Выпуск выходных документов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
