Двигатели постоянного тока
Классификация двигателей та же, что и генераторов. Различаются двигатели постоянного тока: независимого, параллельного, последовательного и смешанного возбуждения.
С независимым возбуждением выполняются мощные двигатели с целью более удобного и экономичного регулирования тока возбуждения. По своим характеристикам они ничем не отличаются от двигателей с параллельным возбуждением.
Энергетическая диаграмма двигателей постоянного тока
Энергетическая диаграмма двигателя постоянного тока приведена на рис. 3.11.
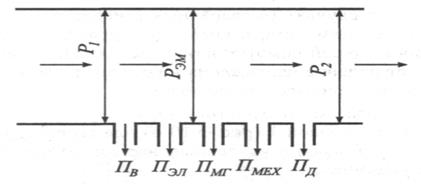
Рис. 3.11. Энергетическая диаграмма двигателя постоянного тока
Входная мощность Р1,передаваемая двигателю из электрической сети, определяется выражением:
 . (3.11)
. (3.11)
Часть этой мощности расходуется на покрытие потерь в обмотке возбуждения Пв = I2Rв и в цепи якоря Пэл = I2RяΣ. Оставшаяся часть, равная электромагнитной мощности за вычетом магнитных потерь Пмг, потерь на трение в подшипниках и вентиляцию Пмех и дополнительных потерь, обеспечивает на валу машины постоянного тока выходную мощность Р2.
Механические характеристики двигателя с независимым
Возбуждением
На основании II закона Кирхгофа для цепей возбуждения и якоря (рис. 3.1), а также учитывая связи, выраженные зависимостями (3.1, 3.2), для установившегося режима можно записать:
 (3.12)
(3.12)
Здесь RяΣ, Rв – суммарное сопротивление якорной цепи и сопротивление обмотки возбуждения.
Под механической характеристикой двигателя принято понимать зависимость его скорости вращения от момента нагрузки ω = f(Μ). Статическую механическую характеристику легко получить из второго и третьего уравнений системы (3.12):
 . (3.13)
. (3.13)
Из уравнения (3.13) следует, что при постоянных напряжении на якоре и потоке скорость машины падает с ростом момента.
Включение в цепь якоря добавочного сопротивления, изменение потока и изменение напряжения изменяют вид механических характеристик. Механические характеристики машины с независимым (параллельным) возбуждением при различных сопротивлениях в якорной цепи показаны на рис. 3.12, а механические характеристики при различных потоках представлены на рис. 3.13, а, а при различных напряжениях на якоре – на рис. 3.13, б.
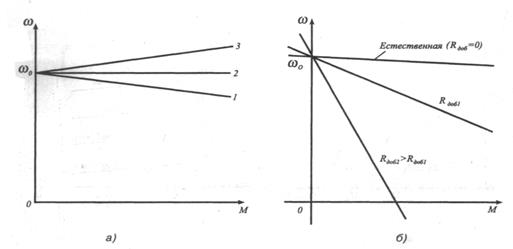
Рис. 3.12. Виды естественных механических характеристик
(а) и реостатные характеристики (б) двигателя параллельного возбуждения
Вид этих характеристик определяет и область их использования при регулировании скорости вращения двигателя постоянного тока: в области скоростей, меньших номинальной, используется регулирование напряжения на якоре, а в области больших – уменьшение магнитного потока машины.
Увеличение напряжения на якоре для регулирования скорости выше номинальной обычно не используется (исключением являются некоторые типы двигателей краново-металлургических серий, в которых допускается двукратное увеличение якорного напряжения), т.к. оно приводит к значительным коммутационным осложнениям в работе механического коллектора. Увеличение магнитного потока также нецелесообразно, т.к. рабочая точка машины находится на колене кривой намагничивания машины, вблизи участка насыщения.
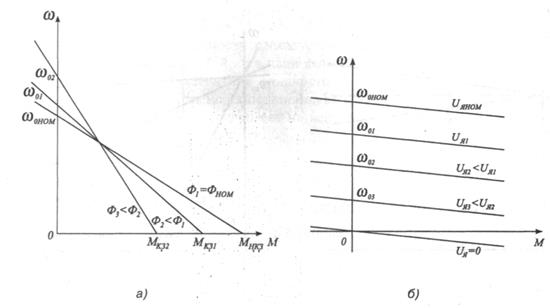
Рис. 3.13. Механические характеристики при различных потоках
(а) и при различных напряжениях на якоре (б)
Регулирование скорости вращения (в сторону ее уменьшения по отношению к номинальной) увеличением сопротивления в цепи якоря в настоящее время используется крайне редко, т.к. резко ухудшает энергетические характеристики электропривода.
Дата добавления: 2021-05-28; просмотров: 726;
Поиск по сайту
Узнать еще
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1
- А параметр этого потока
- Автоматизированный комплекс технической диагностики ЭЛЕКТРОПОЕЗДОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ
- АКТИВНОЕ СОПРОТИВЛЕНИЕ В ЦЕПИ ПЕРЕМЕННОГО ТОКА
- Активные четырехполюсники постоянного тока
- Активные четырехполюсники постоянного тока
- Анализ магнитных цепей постоянного тока
- Анализ организационно-технологической схемы проектируемого потока

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
