Тема 1.8 Електричні машини змінного і постійного струму
Призначення і принцип дії електричних машин. Електричними називають машини, принцип дії яких ґрунтується на використанні явища електромагнітної індукції і які призначені для перетворення механічної енергії в електричну або електричної в механічну. Перше з цих перетворень виконується електричними генераторами, а друге — електродвигунами.
Схему принципу дії електричних машин наведено на рис. 1.51, а.
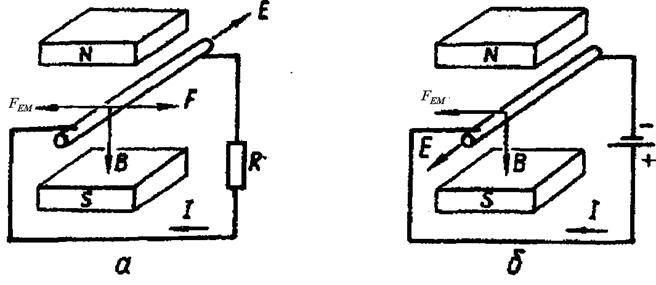
Рис. 1.51 - До пояснення дії елементарного генератора (а) та елементарного двигуна (б).
Якщо провідник переміщується під дією зовнішньої сили F у магнітному полі в напрямку зліва направо перпендикулярно до вектора індукції В магнітного поля, то в провіднику наводиться е.р.с.
 ,
,
де В — магнітна індукція, Тл;
l— активна довжина провідника, тобто довжина його частини, яка міститься у
магнітному полі, м;
v — швидкість руху провідника, м/с.
Під впливом е.р.с. у замкнутому на зовнішній опір R колі виникає струм I того самого напрямку, що й е.р.с. Внаслідок взаємодії струму I з магнітним полем виникає електромагнітна сила:
 ,
,
яка діє на провідник у напрямку, протилежному руху провідника, тобто є гальмівною щодо рушійної сили. При рівномірному русі провідника F=FЕМ, якщо обидві частини цієї рівності помножити на швидкість руху провідника і врахувати значення  , то одержимо:
, то одержимо:

Таким чином, величина механічної потужності Fν яка витрачається на переміщення провідника у магнітному полі, дорівнює електричній потужності E·I, що розвивається у замкнутому колі електричним струмом I. Це і є електричний генератор, в якому механічна потужність перетворюється в електричну. Якщо до провідника, не прикладаючи силу р підвести напругу так, щоб струм I у провіднику мав напрямок, вказаний на рис. 1.51, б, то на провідник буде діяти електромагнітна сила FЕМ. Ця сила зумовлює переміщення провідника в магнітному полі; у провіднику індукується е.р.с, напрямок якої протилежний напрямку напруги U. Тільки одна частина напруги U, підведеної до провідника, врівноважується з наведеною в ньому е.р.с. Е, а друга частина є спадом напруги у провіднику, тому

де R — електричний опір провідника.
Якщо обидві частини рівності помножити на струм I, то

Підставивши замість Е її значення  матимемо:
матимемо:

або

Отже, електрична потужність UI частково перетворюється у механічну FЕМ·ν, а частково витрачається на покриття електричних втрат у провіднику  . Тому провідник зі струмом у магнітному полі можна розглядати як елементарний електродвигун.
. Тому провідник зі струмом у магнітному полі можна розглядати як елементарний електродвигун.
Із викладеного випливає, що:
· електрична машина може працювати ж генератор, так і двигун, тобто має властивість оборотності;
· наявність магнітного поля і провідника зі струмом — необхідна умова роботи електричної машини ж перетворювача енергії;
· підсилення електромагнітної сили досягається підсиленням електромагнітного поля та збільшенням довжини активних провідників, які утворюють обмотку електричної машини.
Елементарні генератор і двигун відображають лише принцип роботи електричних машин. Що ж до конструктивного виконання, то більшість електричних машин побудовано за принципом обертального руху їхньої рухомої частини.
Узагальнена конструкція електричної машини (рис. 1.52) складається з нерухомої частини 1, яку називають статором, і рухомої 2, яку називають ротором. Ротор розміщується у розточці статора і відділений від нього повітряним проміжком. Одна з частин електричної машини має елементи, які утворюють магнітне поле (постійний магніт, електромагніт), а друга має робочу обмотку. Обидві частини машини мають осердя з магнітного матеріалу з невеликим магнітним опором.
Під час роботи електричної машини в режимі двигуна робоча обмотка вмикається до джерела живлення і її провідники обтікаються струмом. Взаємодія цього струму з магнітним полем зумовлює появу електромагнітної сили, що приводить ротор до обертання. При цьому електроенергія, яку споживає з електромережі двигун, перетворюється в механічну. Вона витрачається на обертання будь-якого механізму, верстата, підйомника тощо.

Рис.1.52 - Узагальнена конструктивна схема електричної машини:
1-статор; 2- ротор.
Перетворення енергії в електричних машинах можливе лише при наявності силової взаємодії між магнітними полями статора і ротора, тобто для перетворення енергії поля статор і ротор повинні бути нерухомими один відносно іншого при будь-якій частоті обертання ротора.
Нерухомість полів статора і ротора досягається зміною напрямку струму в провідниках ротора з допомогою щітко - колекторного апарата або створюванням обертового магнітного поля. У зв'язку з цим розрізняють електричні машини колекторні та безколекторні.
Колекторні електричні машини — це переважно машини постійного-струму, з яких найпоширеніші електричні двигуни. Вони плавно і в значних межах регулюють частоту обертання, створюють великі пускові обертальні моменти.
Основними типами безколекторних машин є асинхронні та синхронні машини змінного струму. З асинхронних машин найпоширеніші трифазні асинхронні двигуни. Простота, висока надійність у роботі, малі габаритні розміри й порівняно невисока ціна зумовили їхнє широке застосування в електроприводах.
Синхронні машини застосовують переважно як трифазні синхронні генератори. Вони є основними джерелами електричної енергії трифазного змінного струму.
Діапазон потужностей електричних машин дуже широкий — від частки вата до сотень тисяч кіловат.
Обертове магнітне поле. В основі роботи машини змінного струму лежить утворення в просторі обертового магнітного поля.
Для того щоб зрозуміти, як утворюється обертове магнітне поле, розглянемо модель статора трифазної машини змінного струму. Кожна фаза обмотки статора (рис. 1.53 схематично представлена одним витком, сторони якого укладені у діаметрально протилежні пази.
 |
Рис. 1.53 - Модель статора трифазної машини змінного струму:
а — криві струмів фаз  залежно від часу; б, в, г — напрямки магнітних потоків для моментів часу відповідно
залежно від часу; б, в, г — напрямки магнітних потоків для моментів часу відповідно 
Площини витків трьох фаз розміщені в просторі під кутом 120° одна відносно одної, їхні початки і кінці позначені відповідно C1,C2,C3 і C4, C5, C6.
Струм кожної фази утворює змінне магнітне поле, напрямок і величина якого визначаються напрямком і величиною струму. В сумі змінні магнітні поля трьох фаз утворюють результуюче магнітне поле. Якщо за позитивний прийняти напрямок струму від початку до кінця кожної фази, то можна визначити напрямок результуючого магнітного поля для моментів часу  коли струм у фазах відсутній (дорівнює нулю) або дорівнює
коли струм у фазах відсутній (дорівнює нулю) або дорівнює  Користуючись правилом правоходового гвинта, можна побудувати магнітні лінії, які охоплюють провідники із струмом, і встановити напрямок результуючого магнітного потоку Фрез.
Користуючись правилом правоходового гвинта, можна побудувати магнітні лінії, які охоплюють провідники із струмом, і встановити напрямок результуючого магнітного потоку Фрез.
Якщо до зазначених результуючих магнітних потоків додати Фрездля моментів часу 
 то виявиться, що результуючий магнітний потік, створений трифазним струмом, безперервно і рівномірно змінює свій напрямок, тобто обертається в просторі, таке магнітне поле називається обертовим.
то виявиться, що результуючий магнітний потік, створений трифазним струмом, безперервно і рівномірно змінює свій напрямок, тобто обертається в просторі, таке магнітне поле називається обертовим.
Отже, вісь результуючого магнітного поля здійснює один повний оберт за час, що дорівнює періоду зміни струму Т; при частоті струму  магнітне поле за одну секунду робить f1 обертів. Тоді кутова швидкість двополюсного магнітного поля:
магнітне поле за одну секунду робить f1 обертів. Тоді кутова швидкість двополюсного магнітного поля:

чисельно дорівнює кутовій швидкості струмів, які протікають через обмотку статора.
За схемою з'єднання провідників обмотки струми, що протікають у трифазній обмотці, можуть створювати багатополюсне обертове магнітне поле. При незмінній кутовій частоті струмів ω1 багатополюсне магнітне поле обертається в просторі повільніше, ніж двополюсне, в таку кількість разів, що дорівнює числу пар його полюсів р. Кутова швидкість обертання багатополюсного обертового магнітного поля відносно нерухомої обмотки статора:

називається синхронною швидкістю. Якщо синхронну швидкість треба виразити через частоту обертання n0, то можна скористатись формулою:
 .
.
Напрямок обертання результуючого магнітного поля змінюється тоді, коли змінюється порядок чергування амплітуд струму у фазах обмотки, що досягається перемиканням будь-яких двох проводів з трьох, якими обмотка статора приєднується до мережі. Обертове магнітне поле статора може бути круговим і еліптичним. Кругове поле характеризується тим, що вектор магнітної індукції цього, поля обертається рівномірно і своїм кінцем описує коло, тобто значення вектора індукції в кожному його природному положенні залишається незмінним. Вектори магнітної індукції всіх фаз однакові, тобто являють собою симетричну систему. Якщо вектори магнітної індукції фаз не утворюють симетричної системи, то обертове поле статора стає еліптичним: просторовий вектор магнітної індукції цього поля в різні моменти часу не залишається постійним і, обертаючись нерівномірно, своїм кінцем описує еліпс. Вектор магнітної індукції еліптичного поля можна подати у вигляді суми векторів індукцій прямого  і зворотного
і зворотного  магнітних полів. Зворотне магнітне поле несприятливо впливає на властивості змінного струму. Наприклад, у двигунах воно створює протидіючий (гальмівний) електромагнітний момент і погіршує їхні експлуатаційні властивості.
магнітних полів. Зворотне магнітне поле несприятливо впливає на властивості змінного струму. Наприклад, у двигунах воно створює протидіючий (гальмівний) електромагнітний момент і погіршує їхні експлуатаційні властивості.
Будова і принцип дії асинхронного двигуна. Основними частинами асинхронного двигуна (рис. 1.54) є нерухомий статор і обертовий ротор, які розділені повітряним зазором. Статор складається із станини (або корпуса) з лапами; стального осердя із штампованих, ізольованих один від одного, листів електротехнічної сталі з пазами для укладання обмотки статора. Обмотки статора, виготовленої з ізольованого мідного дроту, й укладеного в пази осердя. Обмотка призначена для утворення обертового магнітного поля.
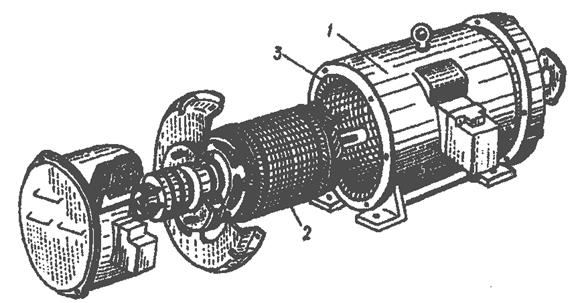
Рис.1.54 - Асинхронний двигун: 1 – станина; 2 – стальне осереддя;
3 – обмотка статора.
Найпростішим елементом обмотки є виток (рис. 1.55, а). Декілька з'єднаних між собою витків, які містяться у двох пазах і мають спільну ізоляцію паза, утворюють секцію (рис. 1. 55, б).
Риc.1.55 - Елементи обмоток статора:
а – виток; б – секція.
Сукупність секцій, які належать до однієї фази, називається фазною обмоткою. Виводи фаз обмотки прийнято позначати: C1,C2,C3 — початки і C4, C5, C6. — кінці відповідно першої, другої і третьої фаз. Окремі фази обмотки статора можуть з'єднуватися зіркою або трикутником. На рис. 1.56 наведено схеми з'єднання фаз обмотки статора і відповідні цим з'єднанням перемикання на щитку машини.
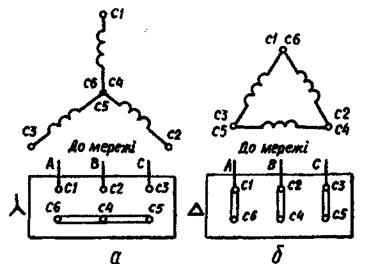
Рис.1.56 - Схема з’єднання фаз
обмотки статора а – зіркою ; б – трикутником
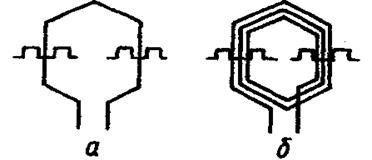
Ротор асинхронного двигуна (рис. 1.57) складається з таких частин: стального циліндра, складеного із штампованих, ізольованих один від одного, листів електротехнічної сталі; вала ротора, на якому закріплено стальний циліндр ротора, підшипників, вентилятора. Залежно від типу обмотки ротори поділяються на короткозамкнені та фазні. У пази короткозамкнених роторів укладено стержні із струмопровідного матеріалу, які з торців замикаються кільцями, утворюючи так зване біляче колесо. У пази фазного ротора укладено провідники секцій трифазної обмотки, які з'єднують зіркою.
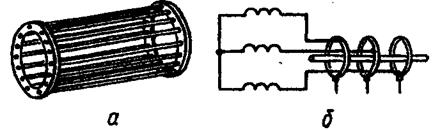
1.57 - Ротор асинхронного двигуна:
а – обмотка короткозамкненого ротора;
б – схема зображення обмоток фазного ротора.
Трифазний струм, що проходить через обмотку статора асинхронного двигуна, створює обертове магнітне поле, яке перетинає провідники обмотки ротора, індукує в них є. р. с. У провідниках замкненої обмотки протікають струми і2. При взаємодії цих струмів та обертового магнітного поля виникають електромагнітні сили, які за правилом лівої руки спрямовані в бік обертання поля статора. Ротор починає рухатися в бік руху магнітного поля.
Швидкість обертання ротора ω менша за швидкість обертання магнітного поля ω0. Це можна пояснити так: якщо б ротор обертався із швидкістю поля, то через відсутність відносного руху провідників обмотки ротора та обертового магнітного поля останнє не перетинало б провідників обмотки ротора, у них не індукувалися б е. р. с. і не було б струмів, а це означає, що електромагнітний момент дорівнював би нулю.
Отже, обертове магнітне поле і ротор асинхронною двигуна принципово обертаються з різними швидкостями—асинхронно, що і визначило назву машини.
Величина відставання ротора від обертового магнітного поля статора характеризується ковзанням S, яке є відношенням різниці  , що називається швидкістю ковзання
, що називається швидкістю ковзання  до швидкості обертового магнітного поля статора
до швидкості обертового магнітного поля статора 

Швидкість обертання ротора ш, виходячи з цього:

Величину ковзання можна виразити і через частоту обертання магнітного поля статорa  і ротора n:
і ротора n:

де  — частота ковзання.
— частота ковзання.
У сучасних асинхронних двигунах залежно від типу за номінальним навантаженням ковзання становить sном=0,015-0,07.
Електрорушійні сили, струми та обертовий момент асинхронного двигуна.
Якщо обмотку ротора асинхронного двигуна розімкнути, а обмотку статора увімкнути у трифазну мережу, то по обмотці статора піде струм, який утворить стале за величиною магнітне поле. Воно перетинатиме витки обмотки статора й ротора і наводитиме в них є. р. с. Е1 і Е2. Діючі значення цих є. р, с. у кожній фазі статора й ротора можна визначити як:
 ,
,
 ,
,
де  — обмоткові коефіцієнти, що враховують конструктивні особливості обмоток статора й ротора; w1, w2 — кількість витків однієї фази, відповідно до статора й ротора; f1— частота e. р. с; Ф — обертовий магнітний потік статора.
— обмоткові коефіцієнти, що враховують конструктивні особливості обмоток статора й ротора; w1, w2 — кількість витків однієї фази, відповідно до статора й ротора; f1— частота e. р. с; Ф — обертовий магнітний потік статора.
Оскільки частота e. р. с. ротора залежить від ковзання, то при рухомому роторі —  , де E2 — діюче значення e. р. с. у фазі нерухомого ротора (при s=1).
, де E2 — діюче значення e. р. с. у фазі нерухомого ротора (при s=1).
Потік розсіювання ротора, перетинаючи витки ротора, наводить у них e. р. с. розсіювання:
 ,
,
де  — індуктивний опір фази при обертанні ротора, який залежить від режиму роботи асинхронної машини. Величину струму ротора можна визначити за формулою:
— індуктивний опір фази при обертанні ротора, який залежить від режиму роботи асинхронної машини. Величину струму ротора можна визначити за формулою:
 .
.
Отже, струм ротора залежить від ковзання: при зменшенні ковзання зменшується е.р.с. і струм обмотки ротора.
Взаємодія обертового магнітного поля із струмом ротора супроводжується появою електромагнітних сил. Момент асинхронного двигуна, що розвивається електромагнітними силами,
 ,
,
де 
 - коефіцієнт , який залежить від конструктивних особливостей ротора двигуна; ψ2- кут зсуву фази струму I2відносно е.р.с. E2S;
- коефіцієнт , який залежить від конструктивних особливостей ротора двигуна; ψ2- кут зсуву фази струму I2відносно е.р.с. E2S;  - активна складова струму ротора.
- активна складова струму ротора.
Отже, обертальний момент асинхронного двигуна визначається не повним струмом ротора, а тільки його активною складовою.
Формула для електромагнітного моменту, яка враховує параметри статора й ротора (активні та індуктивні опори), а також напругу живлення, має вигляд:

де  , - коефіцієнт трансформації асинхронного двигуна; m1, m2 - числа фаз відповідно статора й ротора.
, - коефіцієнт трансформації асинхронного двигуна; m1, m2 - числа фаз відповідно статора й ротора.
Із виходить, що при незмінній швидкості обертання (  ) електромагнітний момент асинхронного двигуна пропорційний квадрату діючого значення напруги, що прикладається до фази обмотки статора.
) електромагнітний момент асинхронного двигуна пропорційний квадрату діючого значення напруги, що прикладається до фази обмотки статора.
Цим пояснюється істотне зменшення моменту асинхронного двигуна при зменшенні підведеної до нього напруги, що розцінюється як негативна
властивість двигуна. Електромагнітний момент тим більший, чим менший активний опір обмотки статора R1та індуктивні опори розсіювання обмоток статора x1і ротора x2.
Якщо знехтувати коливаннями напруги мережі живлення, то з випливає, що електромагнітний момент асинхронного двигуна залежить тільки від ковзання (рис. 1.58). Із рисунка видно, що при збільшенні ковзання електромагнітний момент збільшується доти, доки не досягне максимального значення при певному ковзані , яке називається критичним SК.

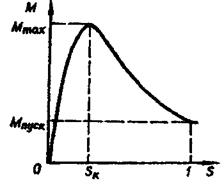
Рис. 1.58 - Залежність електромагнітного моменту двигуна від ковзання.
Під час подальшого збільшення ковзання (S>SКР)через збільшення частоти  значно збільшується індуктивний опір x2S, що призводить до збільшення реактивної частки струму ротора й кута ψ2, до зменшення cos ψ2
значно збільшується індуктивний опір x2S, що призводить до збільшення реактивної частки струму ротора й кута ψ2, до зменшення cos ψ2
та електромагнітного моменту.
Початковий пусковий момент MП.П при нерухомому роторі можна визначити, підставивши у формулу значення ковзання S=1 , тоді:

Відношення початкового пускового моменту до номінального моменту двигуна  характеризує пускові властивості двигуна і називається кратністю початкового пускового моменту. Для асинхронних двигунів з короткозамкненим ротором кратність початкового пускового моменту повинна бути не менше як 0,7—1,8.
характеризує пускові властивості двигуна і називається кратністю початкового пускового моменту. Для асинхронних двигунів з короткозамкненим ротором кратність початкового пускового моменту повинна бути не менше як 0,7—1,8.
Відношення максимального моменту до номінального моменту двигуна
 визначає перевантажувальну здатність двигуна і називається кратністю максимального моменту. Для асинхронних двигунів із короткозамкненим ротором кратність максимального моменту повинна бути більшою за 1,7—2,2.
визначає перевантажувальну здатність двигуна і називається кратністю максимального моменту. Для асинхронних двигунів із короткозамкненим ротором кратність максимального моменту повинна бути більшою за 1,7—2,2.
Пуск та регулювання частоти обертання асинхронних двигунів. Пускові властивості двигуна визначаються передусім значенням пускового струму IПабо його кратністю IП/Iномі значенням пускового моменту MП або його кратністю MП/Mном. Двигун із добрими пусковими властивостями розвиває значний пусковий момент при порівняно невеликому пусковому струмі.
Найпоширенішим способом пуску асинхронного двигуна з короткозамкненим ротором малої та середньої потужності є пуск, що здійснюється безпосереднім вмиканням двигуна у мережу. Він відзначається простотою, але має істотний недолік: у момент вмикання двигуна до мережі в обмотці статора виникає великий пусковий струм, у 5—7 разів більший за номінальний струм двигуна, а початковий пусковий момент виявляється невеликим. Це пояснюється тим, що на початку пуску частина струму ротора та індуктивний опір його обмотки великі, а активна частка струму  , яка визначає пусковий момент, мала.
, яка визначає пусковий момент, мала.
Для зменшення пускових струмів на час пуску двигуна зменшують напругу на статорній обмотці з допомогою резисторів, реакторів або автотрансформаторів. Широко використовують також перемикання обмотки статора із зірки на трикутник. При цьому фазна напруга на статорі зменшується в  разів, внаслідок чого зменшується пусковий струм в три рази. Одночасно втричі зменшуються потужність та обертальний момент двигуна. Цей спосіб зниження напруги під час пуску використовується лише для двигунів, які працюють при з'єднанні обмотки статора трикутником.
разів, внаслідок чого зменшується пусковий струм в три рази. Одночасно втричі зменшуються потужність та обертальний момент двигуна. Цей спосіб зниження напруги під час пуску використовується лише для двигунів, які працюють при з'єднанні обмотки статора трикутником.
Асинхронний двигун із фазним ротором на відміну від двигуна з короткозамкненим ротором має кращі пускові властивості.
Це пояснюється тим, що під час вмикання в коло ротора додаткового активного опору RДОД збільшується активна частка струму ротора .
При (R+RДОДk=x2+kx2) початковий пусковий момент MП.П дорівнює максимальному.
Схему вмикання асинхронного двигуна з пусковим реостатом наведено на рис. 1.59.
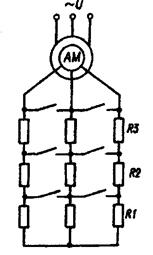
Рис.1.59 - Схема вмикання асинхронного двигуна з пусковим реостатом.
На контактні кільця ротора двигуна накладено щітки, з'єднані проводами з рухомими контактами пускового реостата. Перед пуском двигуна рухомі контакти повинні бути в положенні, яке повністю відповідає введеному в коло ротора опору пускового реостата, і тільки у цьому разі вмикають вимикач. Із збільшенням швидкості обертання вала двигуна поступово зменшують опір пускового реостата, виводячи його повністю до кінця пуску.
Частоту обертання ротора асинхронного двигуна, як це видно з виразу:
 ,
,
можна регулювати трьома способами: зміною частоти напруги живлення f1, перемиканням числа пар полюсів р та зміною ковзання S.
Для зміни частоти f1 використовують регульовані напівпровідникові (транзисторні або тиристорні) та машинні (асинхронний генератор або асинхронний із фазним ротором) перетворювачі. Механічні характеристики двигуна під час частотного регулювання наведено на рис.1.60, а.
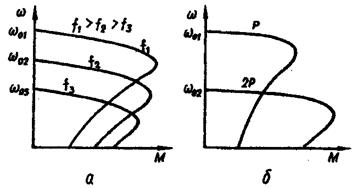
Рис.1.60 - Механічні характеристики двигуна:
а – під час частотного регулювання; б – зміною числа пар полюсів.
Використання окремого перетворювача частоти обмежує застосування цього способу регулювання частоти обертання асинхронних двигунів.
Найпоширенішим є спосіб регулювання швидкості обертання двигуна зміною числа пар полюсів (рис. 1.60, б). Для цього обмотку статора виготовляють так, щоб перемиканням груп котушок можна було б змінювати число пар полюсів, або на статорі вкладають дві окремі обмотки, кожну — на різне число полюсів. Ротор у цьому разі виготовляють звичайним короткозамкненим, число полюсів якого завжди дорівнює числу полюсів обмотки статора.
Швидкість двигуна з фазовим ротором регулюють, вмикаючи в коло ротора регулювальний реостат. При цьому із збільшенням опору реостата швидкість двигуна зменшуватиметься. Отже, застосовуючи цей спосіб, можна тільки зменшити швидкість двигуна. Він пов'язаний з марними втратами енергії на нагрівання реостата, але дозволяє здійснити плавне регулювання і тому застосовується досить широко.
Втрати, коефіцієнт корисної дії та коефіцієнт потужності асинхронного двигуна. Процес перетворення електричної енергії змінного струму в механічну енергію обертального руху в асинхронному двигуні супроводжується електричними, магнітними та механічними втратами.
Електричні втрати виникають під час проходження струмів через обмотки статора Р1е й ротора Р2е та пропорційні квадратам цих струмів. Для трифазних
асинхронних двигунів потужністю до 100 кВт електричні втрати складають:
Р1е+Р2е=(0,04-0,13)Рном
До магнітних належать втрати на гістерезис та вихрові струми в пакетах магнітопроводів статора Р1М й ротора Р2М. Магнітними втратами у сталі ротора звичайно нехтують, тому що частота роторного струму при номінальному навантаженні дуже мала (f2=1-2,5 Гц).Магнітні втрати у трифазних асинхронних двигунах потужністю до 100 кВт складають (0,02-0,06)Рном.
Механічні втрати Рмех складаються з втрат на тертя у підшипниках, ротора об повітря і на вентиляцію двигуна. Вони залежать від швидкості обертання ротора, яка в робочому режимі майже не змінюється, тому і втрати можна вважати сталими Рмех=const. Механічні втрати у трифазних асинхронних двигунах потужністю до 100 кВт складають (0,008-0,015)Рном.
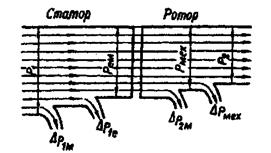
Риc.1.61 - Енергетична діаграма асинхронного двигуна.
Наочну уяву про розподіл потужностей в асинхронному двигуні при перетворенні електричної енергії в механічну дає енергетична діаграма (рис.1.61). Електрична потужність Р1 , яку підводять з мережі до статора двигуна Р1=3U1I1cosφ1, більша, ніж потужність Р2=Рмех.-рмех. — корисна механічна потужність на валу двигуна. Крім того, на енергетичній діаграмі показано: РЕМ=Мω0 — електромагнітна потужність, яка передається обертовим магнітним полем із статором на ротор; РМЕХ=Мω — механічна потужність, яку розвиває ротор асинхронного двигуна.
Коефіцієнт корисної дії асинхронного двигуна η дорівнює відношенню корисної потужності на валу Р2до всієї потужності, що підводиться з мережі до двигуна Р1,

де  — сума втрат у двигуні.
— сума втрат у двигуні.
Номінальний коефіцієнт корисної дії трифазного асинхронного двигуна потужністю до 100 кВт лежить у межах 0,75—0,93, причому більше значення коефіцієнта корисної дії мають двигуни більшої потужності.
Коефіцієнт потужності асинхронного двигуна  , величина якого при синусоїдальних напругах і струмах чисельно дорівнює
, величина якого при синусоїдальних напругах і струмах чисельно дорівнює
залежить від навантаження на валу двигуна При холостому ході коефіцієнт потужності, звичайно, низький і не перевищує 0,08— 0.15, а при навантаженні, близькому до номінального, він досягає 0,75 0,95.
Синхронні машини. Синхронною називається безколекторна машина змінного струму, ротор якої в усталеному режимі обертається зі швидкістю і в напрямку обертового магнітного поля. Синхронні машини використовуються переважно як трифазні синхронні генератори. Вони стали основними джерелами електричної енергії трифазного змінного струму.
Синхронний генератор складається з нерухомої частини — статора (рис. 1.62), у пазах якого розміщують трифазну обмотку, та обертової частини — ротора, що є електромагнітом, який живиться постійним струмом від окремого джерела через щітки і кільця. У статорі генератора є осердя, складене з ізольованих між собою окремих листів електротехнічної сталі.
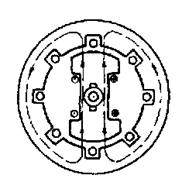
Рис.1.62 – Схема синхронного генератора
Ротори синхронних машин бувають двох типів — з явно (рис.1.63, а) і неявно виявленими (рис. 1.63, б) полюсами. Перші встановлюють у генераторах із невеликою кутовою швидкістю , другі-у генераторах із великою кутовою швидкістю.
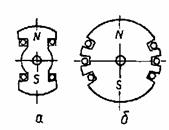
Рис. 1.63 – Схема ротора синхронної машини: а – з явно виявленими полюсами
б – з неявно виявленими полюсами
У синхронних генераторах одержують синусоїдальну форму вихідної напруги. Для цього в генераторах із явно виявленими полюсами створюють нерівномірний повітряний зазор, а в генераторах із неявно виявленими полюсами відповідно розподіляють провідники обмотки збудження по пазах. Під час обертання ротора в обмотках індукується е. р. с, частота якої f залежить від числа пар полюсів р і частоти обертання:

Якщо трифазний синхронний генератор увімкнути в мережу, то через обмотки ротора, число полюсів якого дорівнює числу полюсів статора, піде трифазний змінний струм, який створює обертовий магнітний потік із частотою обертання:

Два потоки (ротора і статора) утворюють результуючий потік, який обертається з тією самою швидкістю n1 Отже, n1 = n1, тобто частота обертання результуючого магнітного поля дорівнює частоті обертання ротора. Збіг в часі обох явиш називається синхронізмом, тому такий генератор називають синхронним.
Діюче значення е. р. с. фази статорної обмотки синхронного генератора при синусоїдальній формі, що індукується у провідниках е.р.с.:

де  — обмотковий коефіцієнт, який враховує зменшення е.р.с. внаслідок розподілу обмотки та укорочення кроку;
— обмотковий коефіцієнт, який враховує зменшення е.р.с. внаслідок розподілу обмотки та укорочення кроку;  — число витків однієї фази статора, з'єднаних послідовно.
— число витків однієї фази статора, з'єднаних послідовно.
Основні характеристики синхронного генератора: характеристика холостого ходу (рис.1.64, а) — залежність е.р.с. генератора від струму збудження при 
 ,
,  та зовнішня характеристика (рис. 1.64, б)- залежність
та зовнішня характеристика (рис. 1.64, б)- залежність  при
при  , .
, .
Рис.1.64 - Характеристики синхронного генератора:
а – холостого ходу ; б – зовнішні
Нормальна робота споживачів електричної енергії можлива лише за стабільної напруги. Для підтримання стабільної напруги на електростанціях застосовують спеціальні пристрої, які зі зміною навантаження змінюють струм збудження генератора. Крива, яка показує залежність струму збудження від струму навантаження  при
при  , називається регулювальною характеристикою.
, називається регулювальною характеристикою.
Синхронний двигун, як і синхронний генератор, складається із статора, на якому розміщено трифазну обмотку, і ротора з обмоткою збудження (остання живиться струмом окремого джерела енергії). Внаслідок взаємодії обертового магнітного поля машини з постійним струмом обмотки збудження виникає обертальний момент, який втягує ротор, змушує його обертатися зі швидкістю поля.
При нерівності частот обертання магнітного поля n0 і ротора nр середня величина обертального моменту дорівнює нулю. Тому під час прямого вмикання в мережу синхронний двигун не розвиває початкового пускового моменту, що і є його істотним недоліком.
Пуск синхронних двигунів здійснюється з допомогою пускової обмотки, розміщеної на роторі, яка нагадує короткозамкнену обмотку асинхронного двигуна. Обертове поле статора, що перетинає короткозамкнені витки пускової обмотки, індукує в них е.р.с. і струми. Взаємодія цих струмів та обертового потоку створює пусковий момент, який розганяє ротор двигуна майже до синхронної швидкості. На цей час створюються синхронізуючі сили, які втягують двигун у синхронізм. Отже, синхронний двигун пускається, працюючи як асинхронний, тому такий спосіб пуску називається асинхронним.
Під час пуску синхронного двигуна у його обмотці збудження індукується е.р.с, величина якої в розімкненому положенні обмотки буває небезпечною для ізоляції ротора. Тому в коло обмотки збудження на час пуску двигуна вмикають активний опір R, який знижує напругу на затискачах до безпечної.
Крім того, роторна обмотка, увімкнена на активний опір, працює як додаткова асинхронна обмотка і створює додатковий пусковий момент, що полегшує пуск двигуна. Безпосереднє вмикання в мережу синхронного двигуна (прямий пуск) застосовують для двигунів, потужність яких порівняно невелика – до сотень кіловат. Для асинхронного пуску синхронних двигунів великої потужності застосовують знижену напругу, використовуючи реактори або автотрансформатори.
Контрольні запитання
1) Поясніть процес утворення обертового магнітного поля.
2) Від чого залежить величина обертального моменту асинхронного двигуна?
3) Як змінити швидкість і напрям обертання ротора асинхронного двигуна?
4) Які втрати енергії є в асинхронному двигуні?
5) Що називають ковзанням ротора асинхронного двигуна?
6) Чому синхронний двигун не має початкового пускового моменту?
7) Чому під час пуску асинхронних двигунів з фазним ротором в коло ротора вмикають додатковий опір?
Принцип дії та будова машини постійного струму. Принцип дії машини постійного струму розглянемо на прикладі моделі генератора постійного струму (рис. 1.65, а) Магнітна система моделі генератора складається з двох нерухомих у просторі полюсів N - S, що створюють постійний за часом магнітний потік. У міжполюсному просторі вміщений виток a-b-с-d (приводиться в рух будь-яким двигуном), кінці якого приєднують до ізольованих один від одного двох металевих півкілець. На обертові разом з витком півкільця накладено нерухомі щітки так, що кожна з них стикається тільки з тим піввитком і провідником, які перебувають у сфері дії одного і того самого полюса. Наприклад, при обертанні витка верхня щітка в кожний момент часу стикується з півкільцем, же з'єднується з провідником, що міститься під північним полюсом.
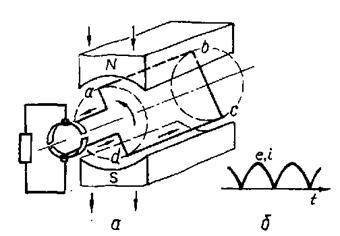
Рис.1.65 - Схема принципу дії машини постійного струму: а - модель генератора постійного струму; б - випрямлені е.р.с. і струм
Під час обертання витка у його активних провідниках (ділянки a-b і c-d) індукуються е.р.с, напрямок яких визначається за правилом правої руки (у верхньому провіднику від b до d в нижньому — від d до с). За законом електромагнітної індукції в кожному з провідників індукується е.р.с, миттєве значення якої визначається як:
де В — магнітна індукція однорідного магнітного поля; v, l — відповідно лінійна швидкість і довжина активного провідника; а — кут між напрямком магнітних ліній і вектором лінійної швидкості.
Коли площина витка перпендикулярна до напрямку магнітних ліній (а =900), е.р.с, яка індукується в провідниках, досягає максимального значення:

тоді  можна записати у вигляді:
можна записати у вигляді:
Отже, при обертанні витка в однорідному магнітному полі з постійною кутовою швидкістю в його провідниках індукується змінна синусоїдальна е.р.с. Проте в колі навантаження стр
Дата добавления: 2017-01-26; просмотров: 4620;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- D) Система класифікації за підтримкою багато гілкового виконання програми.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
