Устройство токарно-револьверного автомата модели 1А118
Основными узлами и частями станка являются (рис. 1.39) основание 1, станина 12, шпиндельная бабка 4, шпиндель 7, передний 5 и задний 8 поперечные суппорты, вертикальный суппорт 6, револьверный суппорт 10, шестипозиционная револьверная головка 9, главный распределительный вал XII, вспомогательный управляющий вал VIII, электродвигатель 2. Внутри основания 1 размещены коробка скоростей, бак для смазочно-охлаждающей жидкости и электрошкаф.
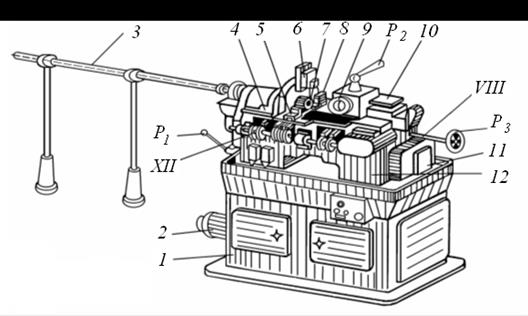
Рис. 1.39. Токарно-револьверный автомат модели 1А118
На шпиндельной бабке 4 справа закреплён кронштейн с направляющими для вертикально перемещающегося суппорта 6. На суппорте устанавливают, как правило, отрезной резец, работающий с движением вертикальной подачи. Слева от шпиндельной бабки размещён кронштейн с механизмом перемещения прутка 3. Сам пруток располагают и закрепляют внутри шпинделя с помощью цангового патрона. Шпинделю вместе с прутком сообщают от коробки скоростей вращение, являющееся при работе главным движением резания.
На суппортах 5 и 8 закрепляют режущие инструменты, работающие с движением поперечной подачи: фасонные круглые и призматические, канавочные и отрезные резцы, резцы для обработки коротких конических поверхностей, накатники и др. Инструменты, требующие при резании движения продольной подачи, устанавливают в гнёзда шестипозиционной револьверной головки 9. Головка снабжена приводом автоматического поворота, обеспечивающим смену режущего инструмента, и механизмом её фиксации в положениях, обеспечивающих рабочие позиции для каждого закрепляемого в головке инструмента. Для вывода фиксатора из револьверной головки при наладке автомата с целью ручного её поворота используют рукоятку Р2.
В одном из гнезд револьверной головки размещён механизм обгона и быстрого сверления. Его шпиндель, в котором крепят метчики, плашки и свёрла, имеет привод вращения. Механизм обгона используют при сверлении отверстий малых диаметров и для свинчивания резьбонарезных инструментов с нарезанной резьбы. В случае применения этого механизма для сверления отверстий диаметром менее 5 мм инструменту (сверлу) придаётся вращение в направлении обратном вращению заготовки. Это повышает скорость главного движения резания и производительность обработки. Для свинчивания резьбонарезного инструмента шпиндель механизма обгона получает вращение в том же направлении, что и заготовка, но с большей частотой вращения.
Автоматическое управление последовательностью и режимами работы механизмов станка осуществляется от установленных на главном распределительном валу XII (рис. 1.39 и 1.40) кулачков К5, К6 и К7 и переналаживаемых упоров на дисках К4, К8 и К9. Кулачки К5, К6 и К7 через системы рычагов обеспечивают движения подачи соответственно вертикального, переднего и заднего суппортов. Установленный на валу XI кулачок К10 (рис. 1.40) управляет перемещениями револьверного суппорта.
Работа механизмов перемещения и закрепления прутка, поворота револьверной головки, включения вращения шпинделя механизма обгона и быстрого сверления осуществляется от быстроходного вспомогательного управляющего вала VIII (см. рис. 1.39 и 1.40) путем включения или выключения расположенных на нём муфт сцепления М2, М3 и М4. Управление включением муфт производится через систему рычагов от переналаживаемых упоров на дисках К4, К8 и К9 главного распределительного вала XII.
Производительность автомата определяется частотой вращения главного распределительного вала XII. За один его оборот изготавливается одна деталь. Частоту вращения этого вала регулируют с помощью подбора зубчатых колёс гитары сменных зубчатых колёс 11 (см. рис. 1.39). Гитара располагается с правой стороны станины станка. Она связывает главный распределительный вал XII со вспомогательным управляющим валом VIII, размещённым сзади станины. Включение и выключение вспомогательного управляющего вала VIII, а вместе с ним и системы автоматического управления станком производят с помощью рукоятки Р1. При наладке станка вспомогательный управляющий вал VIII поворачивают вручную с помощью закреплённого на нём маховичка Р3.
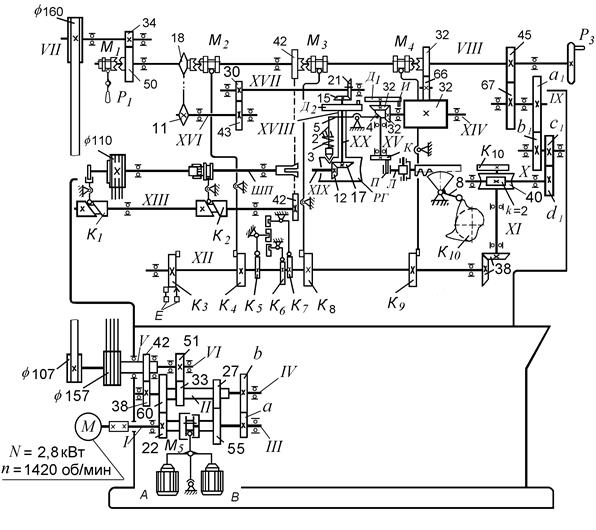 Рис. 1.40. Кинематическая схема токарно-револьверного автомата модели 1А118
Рис. 1.40. Кинематическая схема токарно-револьверного автомата модели 1А118
Кинематическая схема станка и устройство основных его механизмов[2]
Токарно-револьверный автомат 1А118 имеет электромеханический привод, состоящий из источника движения — электродвигателя М (см. рис. 1.40) и совокупности механизмов, передающих движения исполнительным узлам станка. Привод станка обеспечивает вращение шпинделя с заготовкой (главное движение резания), движения подач и вспомогательные перемещения поперечных (переднего и заднего), вертикального и револьверного суппортов; вращение шпинделя механизма обгона и быстрого сверления револьверной головки, периодические делительные повороты револьверной головки, перемещения зажимной и подающей цанг, используемых для выдвижения прутковой заготовки из шпинделя и закрепления её в исходном для начала обработки положении.
Кроме того, для осуществления автоматического цикла работы станка вращение от электродвигателя М сообщается трём управляющим валам: главному распределительному XII (рис. 1.40), вспомогательному управляющему VIII и валу XI.
Для передачи исполнительным механизмам движений и согласования параметров этих движений в станке-автомате предусмотрены соответствующие кинематические цепи, состоящие из последовательно соединённых механизмов, в том числе различных типов передач. Проставленные у элементов передач цифры, обозначают: для зубчатой передачи — числа зубьев колёс, для червячной передачи — число заходов червяка (k) и число зубьев червячного колеса, для ременной передачи — диаметры шкивов, для цепной передачи — числа зубьев звёздочек. Числа зубьев сменных зубчатых колёс обозначены на схеме строчными буквами (без индексов и с индексами) а, b, а1, b1, c1, d1 и др.
Кинематическая цепь вращения шпинделя включает электродвигатель М и механизмы передачи движения от электродвигателя к шпинделю станка (ШП) Она предназначена для сообщения заготовке вращения, являющегося при обработке главным движением резания. Формула кинематической связи механизмов этой цепи может быть представлена в следующем виде:

 22/60 - II - 27/55 (механизм перебора)
22/60 - II - 27/55 (механизм перебора)
 М - I М5 - III - a/b - IV - 38/42 - V -
М - I М5 - III - a/b - IV - 38/42 - V -
— 157/110 — шпиндель (ШП).
В автоматическом режиме работы при установленных на станке сменных зубчатых колёсах a и b с конкретными числами зубьев шпиндель станка может иметь одну из двух частот вращения. Переключение вращения шпинделя с одной частоты на другую происходит от упоров диска К3, расположенного на валу XII. Упоры в заданный технологическим процессом момент времени воздействуют на конечные выключатели «E» и включают один из электромагнитов «A» или «B», управляющих работой фрикционной муфты М5. При включении муфты М5 влево вращение от электродвигателя поступает на вал I и через муфту М5 на вал III с неподвижно закреплённым на нём сменным зубчатым колесом a.
При включении муфты М5 вправо в кинематическую цепь вводится механизм перебора, состоящий из двух пар зубчатых колёс 22/60 и 27/55. Вращение на вал III и зубчатую передачу a/b поступает от вала I через эти зубчатые передачи. Частота вращения шпинделя в случае включения механизма перебора уменьшается в 5,55 раза. Сменные зубчатые колёса a и b гитары скоростей, прилагаемые к станку, дают возможность изменять передаточное отношение зубчатой пары между валами III и IV и получать восемь различных передаточных отношений. Это обеспечивает (с учётом возможности включения механизма перебора) 16 различных частот вращения шпинделя в диапазоне от 151 до 3895 об/мин.
Кинематические цепи подач поперечных, вертикального и продольного суппортов (рис. 1.41) представляют собой кулачковые механизмы, преобразующие вращения дисковых кулачков в возвратно-посту-пательные движения соответствующих суппортов.
Движения поперечных (переднего и заднего) суппортов осуществляются от кулачков K6 и К7 (см. рис. 1.40). Схема работы механизма подачи переднего суппорта представлена на рис. 1.41, а. Возврат суппорта и силовой контакт нижнего ролика рычага Р с кулачком осуществляется пружиной П. Фасонная поверхность кулачка является своеобразной «записью» программы работы суппорта.
Рис. 1.41. Механизмы перемещений переднего (а) и револьверного (б) суппортов
При скольжении ролика по цилиндрическому участку кулачка суппорт остаётся неподвижным. Разность (d1 – d0)/2 восходящего участка определяет длину хода суппорта в направлении движения подачи DS. Угол подъёма этого же участка определяет скорость движения подачи υS. Отвод суппорта происходит при движении ролика по нисходящему участку кулачка. По такой же схеме работает и задний суппорт станка. Каждый поперечный суппорт один раз за цикл обработки подводится к заготовке. Поэтому кулачки К6 и К7 (см. рис. 1.40), управляющие поперечными суппортами, имеют по одному выступу.
Управление работой верхнего суппорта осуществляется аналогичным способом от кулачка К5.
Управляющий кулачок К10 револьверного суппорта может иметь до шести выступов (в соответствии с числом гнёзд револьверной головки), занятых режущими инструментами (рис. 1.41, б). Разные скорости подач и пути перемещений для каждого из инструментов револьверной головки определяются формой соответствующих выступов кулачка К10.
Определённая очерёдность вступления в работу суппортов обуславливается угловым расположением кулачков К5, К6, К7, К10 на валах XII и XI друг относительно друга.
Кинематические цепи вращения вспомогательного управляющего и главного распределительного валов. Формула кинематических связей механизмов цепи привода вспомогательного управляющего вала VIII записывается в следующем виде:
М - I - 22/60 - II - 33/51 - VI - 107/160 - VII - 34/50 - М1 - VIII.
При включённом электродвигателе М вращение через ряд передач поступает на свободно сидящее на вспомогательном управляющем валу VIII колесо 50. На вал VIII вращение с этого колеса передаётся при включении рукояткой Р1 кулачковой муфты М1. Из формулы кинематических связей следует, что вспомогательный управляющий вал имеет постоянную частоту вращения,равную 150 об/мин.
Согласование частот вращения главного распределительного XII и вспомогательного управляющего VIII валов осуществляют по приведённой ниже формуле их кинематических связей:
VIII - 45/67- IX - a1/b1 - c1/d1 - X - 2/40 - XI - 38/38 - XII.
Гитару сменных зубчатых колёс в этой цепи, включающую две последовательно расположенные пары зубчатых колёс (a1/b1 и c1/d1), используют для настройки частоты вращения главного распределительного вала XII, определяемую длительностью автоматического цикла изготовления детали.
Включение вращения главного распределительного вала XII происходит одновременно с включением вспомогательного вала рукояткой Р1. Передаточное отношение гитары сменных зубчатых колёс iг =  при наладке станка находят из уравнения кинематического баланса цепи, приведённого далее в виде следующей формулы:
при наладке станка находят из уравнения кинематического баланса цепи, приведённого далее в виде следующей формулы:
 ,
,
где nгрв — частота вращения главного распределительного вала XII, об/мин; nврв — частота вращения вспомогательного распределительного вала VIII, об/мин.
Из неё следует, что
 .
.
Входящую в данную формулу частоту вращения вспомогательного распределительного вала nврв, об/мин, определяют из уравнения кинематического баланса цепи вращения вспомогательного распределительного вала:
nврв = 1420  .
.
Частоту вращения главного распределительного вала nгрв, об/мин, принимают равной
nгрв = 1/Тц,
где Тц — период автоматического цикла станка, соответствующий расчётному времени изготовления одной детали, мин.
Кинематическая цепь перемещения и закрепления прутка. Данная кинематическая цепь предназначена для выдвижения прутковой заготовки через отверстие в шпинделе на заданную длину с последующим закреплением выдвинутого прутка. Реализация этих перемещений обеспечивается автоматической работой подающей и зажимной цанг.
Зажимная цанга служит для закрепления заготовки — прутка в период его обработки и раскрепления прутка после отрезания изготовленной детали для перемещения прутка в рабочую позицию с последующим изготовлением очередной детали. Перемещение прутка в новую позицию осуществляет подающая цанга.
Формула кинематических связей механизмов цепи имеет следующий вид:
 К1 – подающая цанга,
К1 – подающая цанга,
VIII - М3 - 42/42 - XIII
К2 – зажимная цанга.
Включение цепи осуществляется автоматически упором на барабане К8 (см. рис. 1.40) через однооборотную кулачковую муфту М3, расположенную на валу VIII. Муфта М3 называется однооборотной, поскольку соединяет зубчатое колесо 42 с постоянно вращающимся валом VIII только на время одного оборота вала. В течение этого оборота через передачу 42–42 происходит один оборот вала XIII с кулачками К1 и К2, управляющими соответственно подающей 1 и зажимной 2 цангами (рис. 1.42).
Преобразование вращения вала XIII в поступательное перемещение подающей и зажимной цанг происходит с помощью цилиндрических кулачковых механизмов К1 и К2, на которых программы движений соответствующих цанг и согласование их действия во времени заданы формой (наклоном) канавок на цилиндрической поверхности кулачков. За время одного оборота вала XIII последовательно происходит:
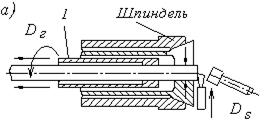
Рис. 1.42. Этапы работы механизма подачи и зажима прутка
— отвод подающей цанги 1 влево во время отрезки готовой детали, цанга скользит по прутку, так как зажимная цанга 2 сжатыми лепестками удерживает пруток в неизменном положении (рис. 1.42, а);
— остановка вращения шпинделя;
— раскрепление зажимной цанги при её движении вправо одновременно с подводом револьверного суппорта с упором 3 в револьверной головке на расстояние ℓ от торца цанги (рис. 1.42, б);
— движение подающей цанги 2 вместе с прутком вправо до касания прутком упора 3 (рис. 1.42, в);
— закрепление прутка зажимной цангой 2 при её движении влево (рис. 1.42, г);
— включение вращения шпинделя.
Кинематическая цепь вращения шпинделя механизма обгона и быстрого сверления начинается от вспомогательного распределительного вала VIII и заканчивается инструментальным шпинделем XIX, расположенным в одном из гнезд револьверной головки. В это гнездо устанавливают сверло, метчик или плашку.
Включение кинематической цепи обгона и быстрого сверления происходит с помощью рычага от переналаживаемого упора на диске К4, расположенного на главном распределительном валу XII. Рычаг включает однооборотную кулачковую муфту М2 в тот момент, когда в рабочей позиции находится гнездо револьверной головки, несущее инструментальный шпиндель со сверлом или метчиком (плашкой). Муфта М2 соединяет вращающийся вспомогательный распределительный вал VIII со звёздочкой 18 цепной передачи 18/11 на время одного оборота вала VIII. Вращение через цепную передачу поступает на вал XVI, а далее через систему механизмов на шпиндель механизма обгона и быстрого сверления XIX. Частота вращения шпинделя имеет постоянное значение (n = 700 об/мин).
Ниже приведена формула кинематических связей этой цепи:
VIII - М2 - 18/11 - XVI - 43/30 - XVII - 21/15 - XX -17/12 - XIX (инструментальный шпиндель).
Кинематические цепи продольного перемещения револьверного суппорта и поворота револьверной головки. За период автоматического цикла работы станка (время изготовления одной детали) револьверный суппорт может совершать до шести циклов движений. Каждый цикл включает: быстрый подвод суппорта к заготовке, движение продольной подачи суппорта (рабочий ход), быстрый отвод, поворот револьверной головки на 1/6 оборота и фиксацию её в этой позиции. Все эти движения во времени протекают в последовательности, определяемой конструкциями механизмов поворота револьверной головки и продольных перемещений револьверного суппорта и особенностями работы их приводов. Схема работы механизма продольных перемещений револьверного суппорта и устройство механизма поворота револьверной головки представлены на рисунках 1.41, б и 1.43.
Рис. 1.43. Механизмы револьверной головки
Кинематическая цепь поворота револьверной головки 1 обеспечивает перемещение на рабочую позицию режущих инструментов, устанавливаемых с помощью державок в гнёзда (отверстия) револьверной головки, в заданной технологическим процессом последовательности. Срабатывание цепи и поворот револьверной головки на 1/6 часть окружности происходят после каждого отвода револьверного суппорта в исходное положение по командам упоров на барабане К9 главного распределительного вала XII, включающих рычагом однооборотную муфту М4 (см. рис. 1.40).
При включении муфты М4 вращение от вспомогательного управляющего вала VIII через эту муфту поступает на зубчатое колесо 32, которое через зубчатые колёса 66/32 и 32/32 сообщает один оборот кривошипному валику XV (рис. 1.43). За первую половину оборота валика суппорт (при неподвижной рейке 6) отойдет вправо на расстояние, равное удвоенному радиусу R, определяющему положение кривошипного пальца П на эксцентрике Ж. Одновременно торцовый кулачок 4, действуя на двуплечий рычаг 5, выводит фиксатор 2 из отверстия револьверной головки 1. После этого палец И диска Д1 входит в один из шести пазов диска Д2 и поворачивает револьверную головку на 60 градусов. Палец двуплечего рычага 5, перемещаясь по кривой спада торцового кулачка 4, освобождает фиксатор 2, который под действием пружины 3 фиксирует револьверную головку на новой позиции. Кривошипный валик XV, продолжая вращаться, за время второй половины оборота переводит кривошип Ж в крайнее правое положение, подготавливая выполнение следующего перехода.
Движение продольной подачи револьверный суппорт получает от кулачка К10, расположенного на валу XI, по следующей кинематической цепи (см. рис. 1.40):
VIII - 45/67 - IX - a1/b1 - c1/d1 - X - 2/40 - XI - К10 - рычаг 8 - зубчатый сектор - рейка – револьверная головка (РГ).
Во время рабочего хода револьверного суппорта звенья кривошипно-шатунного механизма (Л, П, Ж) неподвижны и находятся в положении, указанном на рисунке 1.43. Рейка 6 оказывается жёстко связанной с валиком XV и с суппортом. Следовательно, при движении пустотелой рейки 6 будет перемещаться суппорт с револьверной головкой.
Одновременно будет сжиматься пружина 7, усилием которой ролик рычага 8 прижимается к кулачку К10. По окончании рабочего хода ролик переходит с кривой рабочего хода кулачка К10 на кривую спада, и револьверный суппорт под действием пружины 7 отходит назад на величину спада кривой. После этого отхода включаются кинематические цепи быстрого отвода суппорта, поворота револьверной головки на 1/6 оборота и быстрого подвода суппорта к начальной позиции, с которой начинается движение продольной подачи от кулачка К10.
Формула кинематических связей этой цепи имеет следующий вид:
VIII – 32/66 – 66/32 – XIV – 32/32 – XV – Д1/Д2 – револьверная головка (РГ).
Дата добавления: 2021-05-28; просмотров: 766;
Поиск по сайту
Узнать еще
- А) Назначение и устройство
- А. Возникновение и эволюция глобального моделирования
- А. Классификация видов моделирования (Л.5)
- А.7 Устройство и принципы действия адсорбционных аппаратов
- Адаптивное управление по заданной модели
- Административно-территориальное устройство государства
- Административно-территориальное устройство и национальная автономия в КНР
- Административно-территориальное устройство РФ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
