Исполнительные устройства
Исполнительное устройство – устройство, воспринимающее управляющий сигнал и воздействующее на объект управления непосредственно или через рабочий орган путем изменения потока энергии или потока вещества, поступающего к объекту управления. Рабочими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие регулирующие и запорные органы.
Исполнительные устройства, специально созданные для использования в системах автоматического управления (САУ), называют исполнительными механизмами. Однако функции исполнительных устройств (ИУ) часто выполняют нагревательные элементы, осветительные приборы, электродвигатели и т. п., которые часто так же называют исполнительными механизмами. Далее будут рассмотрены специализированые исполнительные механизмы.
ИМ можно классифицировать по следующим признакам:
по виду используемой энергии;
· Гидравлические ИУ, которые в свою очередь могут быть поршневые, лопастные и шестеренчатые. Поршневые ИМ преобразуют энергию рабочей жидкости в поступательное движения штока, воздействующего на объект управления и называются прямоходовыми. Прямоходовой ИМ может быть сблокирован с кривошипно-шатунным механизмом, преобразующим поступательное движение во вращательное. Прямоходовой поршневой ИМ показан на рисунке хх
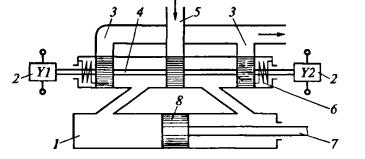
Рис. Прямоходовой гидравлический ИМ.
1- гидроцилиндр, 2 - электромагниты, 3 – сливная магистраль, 4 золотник, нагнетательный канал, 6 – пружины, 7 – шток, 8 – поршень.
Исполнительные механизмы изготовляются в виде цилиндра 1, в котором перемещается поршень 8 под давлением рабочей среды, нагнетаемой в цилиндр насосом или от системы компрессор-ресивер (рис. 4.19).
Управление потоком рабочей среды осуществляется золотником 4, который в стационарном оборудовании чаще всего перемещается в обе стороны электромагнитами Y1, Y2. При обесточенных электромагнитах 2 золотник 4 удерживается в среднем нормальном положении пружинами 6, закрывая нагнетательный канал 5 с рабочей средой и каналы 3 сливной магистрали. При включении электромагнита Y1 открывается нагнетательный канал 5, канал3 сливной магистрали и поршень перемещается влево с тянущим перемещением нагрузки на штоке поршня. При выключении Y1 и включении Y2 происходит реверс.
Существуют также лопастные и шестеренчатые гидравлические механизмы, выходное звено которых совершает поворот вокруг своей оси. Поворотная лопасть лопастного серводвигателя под действием разности давлений вращается в корпусе вокруг оси. Угол поворота лопасти ограничен, поэтому гидродвигатели поворотного действия применяются для управления объектами, движение которых также ограничено.
Достоинствами гидравлических ИМ является возможность получения значительных усилий при малых габаритах, малая инерционность. Недостатком является их высокая пожароопасность и дороговизна рабочих жидкостей.
· пневматические ИМ, которые подразделяются на мембранные и поршневые. Поршневые ИМ работают также как гидравлические. Мембранный ИМ показан на рисунке хх;
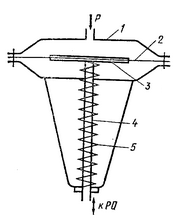
Рис Мембранный исполнительный механизм.
1 – корпус, 2 – мембрана, 3 – диск, 4- шток, 5 – пружина.
При увеличении давления Р шток движется вниз преодолевая усилие пружины и перемещает рабочий орган (например клапан). При уменьшении давления шток движется вверх под действием пружины.
Достоинствами пневматических систем является дешевизна рабочего тела – воздуха. Недостатком – необходимость осушения используемого воздуха и дороговизна компрессорной установки.
· электрические;
Классификация электрических исполнительных механизмов (ИМ) приведена на рисунке хх
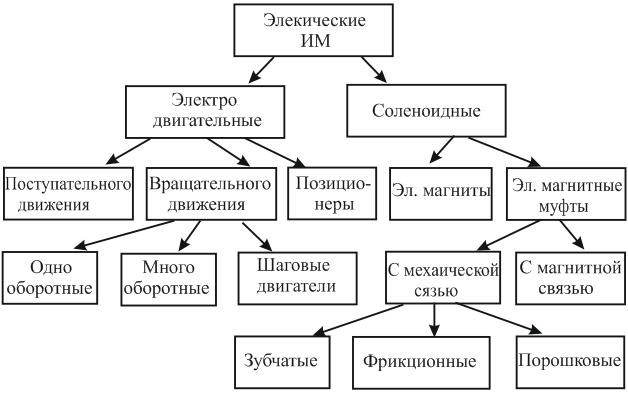
Рис Классификация электрических исполнительных механизмов
Электрические ИМ в зависимости от того, каким образом приводится в действие рабочий орган делятся на две большие группы – соленоидные (на основе электромагнита) и электродвигательные (на основе электродвигателя).
Соленоидные ИМ применяются тогда, когда для перемещения рабочего органа (РО) требуется большое усилие, а перемещение (рабочий ход) порядка несколько миллиметров. Они могут использоваться в системах автоматического управления только с позиционными регуляторами (кроме муфт скольжения).
Соленоидные ИМ по конструкции подразделяются на электромагниты и электромагнитные муфты (ЭМ). На рисунке хх показаны типы электромагнитов.
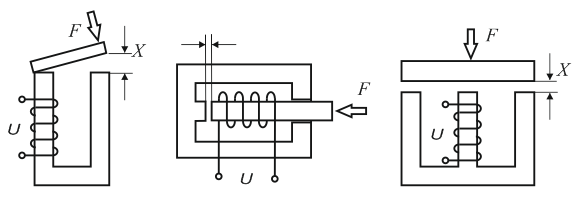
| а) | б) | в) |
Рис. Типы электромагнитов: а – клапанный (поворотный), б, в – прямоходовой
Прямоходовые электромагниты обеспечивают большее по сравнению с клапанными (поворотными) перемещение рабочего органа, которое может составлять несколько десятков миллиметров. Усилие, создаваемое электромагнитом, зависит от зазора между подвижной и неподвижной частью магнитопровода. Чем меньше зазор, тем больше усилие. Сопртивление рабочего органа наоборот, в момент трогания максимально. Тяговые характеристика электомагнита и рабочего органа показаны на рисунке хх
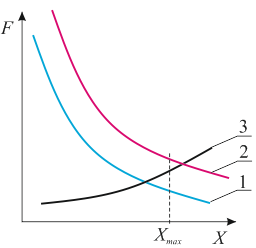
Рис Тяговые характеристики: 1- удерживающего электромагнита, 2 – тягового магнита, 3 – перемещаемого механизма.
Для того чтобы электромагнит мог создать усилие, достаточное для перемещения рабочего органа, в начальный момент подают повышенное напряжение, либо делают электромагниты с двумя обмотками, одна из которых служит для перемещения РО (тяговая), другая (удерживающая, менее мощная) служит для удержания его в перемещенном состоянии.
Электромагнитные муфты предназначены для соединения и разъединения двух основных валов или же вала с деталью, свободно сидящей на нём.
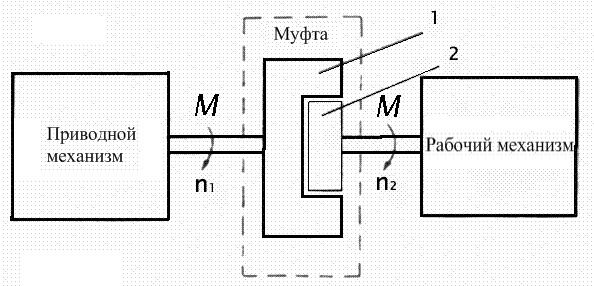
Рис Электромагнитная муфта: 1 – ведущая полумуфта, 2 – ведомая полумуфта.
На рис.7.4 показана схема соединения приводного механизма с рабочим механизмом с помощью муфты. Муфта состоит из двух основных частей: ведущей 1, на которую поступает мощность от приводного двигателя, и ведомой 2, мощность с которой передается рабочему механизму.
Электромагнитные муфты (ЭМ) делятся на муфты с механической связью и муфты с магнитной связью (индукционные).
ЭМ с механической связью обеспечивают передачу крутящего момента либо за счет зубчатой передачи (зубчатые ЭМ), либо за счет трения (фрикционные) при сжатии полумуфт, которое обеспечивается подачей питания на обмотку муфты.
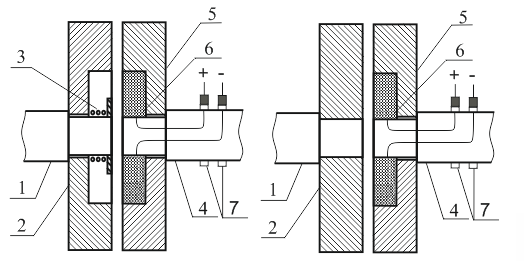
Рис Конструкция электромагнитных муфт
а) - фрикционная ЭМ, б) – индукционная ЭМ.
1 – вал приводного механизма, 2 – ведущая полумуфта, 3 – возвратная пружина, 4 – вал рабочего механизма, 5 – ведомая полумуфта, 6 – обмотка, 7 - контактные кольца
ЭМ вязкого трения так же относятся к ЭМ с механической связью. Ведущая и ведома части муфты соединяются при помощи вязких смесей, которые находятся между ними. При включении питания обмотки создается магнитное поле, которое воздействует на заполняющую зазор смесь из ферромагнитного порошка и масла, которая теряет пластичные свойства и обеспечивает сцепление ведущей и ведомой частей ЭМ. Эти муфты обладают хорошими характеристиками и могут применяться для плавного пуска и останова рабочих механизмов.
ЭМ с магнитной связью, или индукционные (Рисунок хх, б), могут быть асинхронные и синхронные.
Как и фрикционные ЭМ, они имеют ведущую и ведомую части, но при включении питания обмотки эти части не притягиваются друг к другу. Зазор между ними остается. Они работают по принципу синхронного или асинхронного двигателя. В асинхронных ЭМ магнитное поле создается обмоткой. Оно индуцирует в ведомой части вихревые токи, создающие свое магнитное поле, которое взаимодействует с полем обмотки, создавая крутящий момент. С помощью таких ЭМ возможен плавный пуск и останов рабочих механизмов.
В синхронных ЭМ на ведущей и ведомой частях располагаются либо постоянные либо электромагниты и работают они аналогично синхронным двигателям.
На рисунке ХХ показана порошковая муфта (муфта вязкого трения). Корпус ведомой полумуфты 2 жестко закреплен на валу рабочего механизма 1. На валу приводного механизма находится обмотка муфты 3 в ферромагнитном корпусе 4, разделенном немагнитными вставками 5. Зазор между ведущей и ведомой полумуфтами заполнен смесью 6 машинного масла с ферромагнитным порошком. При отсутствия питания обмотки заполнитель сохраняет текучесть и механический момент с приводного механизма не передается на рабочий механизм. При включении питания обмотки возникает магнитное поле, под действием которого ферромагнитный порошок выстраивает жесткую структуру по силовым линиям магнитного поля, заполнитель утрачивает текучесть и механический момент передается на вал рабочего механизма.
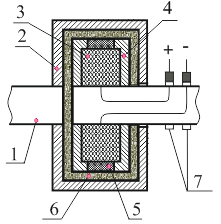
Рис. Муфта вязкого трения.
1 – вал рабочего механизма, 2 – корпус ведомой полумуфты, 3 – обмотка, 4 – корпус ведущей полумуфты, 5 - немагнитная вставка, 6 – заполнитель, 7 – контактные кольца для подвода питания.
К достоинствами ЭМ вязкого трения относится возможность плавного регулирования скорости рабочего механизма, малая мощность управления ЭМ, составляющая 1...3% от передаваемой мощности. Недостатком является большие габариты, малая надежность из за быстрого износа ферромагнитного порошка в следствии перетирания.
Электодвигательные исполнительные механизмы.
Блок-схема электродвигательного исполнительного механизма (ИМ), работающего в системе автоматического управления (САУ), представлена на рис.2. Она работает следующим образом. Управляющий сигнал с выхода регулятора (кон
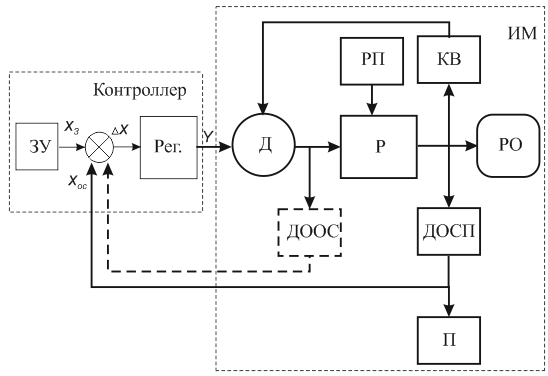
Рис Функциональная схема электродвигатедьного исполнительного механизма
троллера), поступает на двигатель Д, который через редуктор Р перемещает рабочий орган РО. Концевые выключатели KB служат для выключения двигателя в крайних положениях. При отключении САУ имеется возможность вручную перемещать рабочий орган с помощью ручного привода РП. Датчик обратной связи по положению ДОСП формирует сигнал, пропорциональный положению рабочего органа Р. Если управляющий сигнал регулятора представляет собой замыкающийся/размыкающийся контакт (релейный выход), рабочий орган перемещается с постоянной скоростью. Сигнал обратной связи подается в регулятор и суммируется в нем с сигналом задания, тем самым формируя сигнал рассогласования. Наличие сигнала обратной связи по положению у ИМ постоянной скорости перемещения дает возможность осуществлять непрерывные законы регулирования (П, ПИ, ПИД), имея регулятор с релейным выходом.
Сигнал обратной связи можно визуально наблюдать на приборе П, если ИМ укомплектован этим прибором. Датчик обратной связи ДОСП может быть выполнен в виде потенциометра, индуктивного трансформаторного датчика с выходом по напряжению или по току.
Датчики обратной связи по положению ОСП, выполняемые в виде потенциометров, индуктивных датчиков или линейных индукционных потенциометров, и датчики обратной связи по скорости ОСС, выполняемые в виде тахогенераторов постоянного или переменного тока, служат для ввода дополнительных сигналов, необходимых для получения требуемых характеристик от электрического исполнительного механизма.
Для получения средней переменной скорости перемещения рабочего органа исполнительного механизма при релейном управлении широко используется импульсный режим работы его электродвигателя. При этом сигнал с регулятора представляет собой периодическое замыкание/размыкание контактов, а средняя скорость перемещения формируется за счет длительности замкнутого состояния (импульса), либо за счет длительности разомкнутого состояния (паузы).
Если в регуляторе, который управляет ИМ, имеется возможность управлять скоростью двигателя (фазовое управление, либо аналоговый выход и двигатель постоянного тока в ИМ), ИМ может иметь датчик обратной связи по скорости ДООС (на рисунке хх показан пунктиром).
На рисунке хх показана типовая схема включения ИМ с трехфазным двигателем без датчика обратной связи по положению.
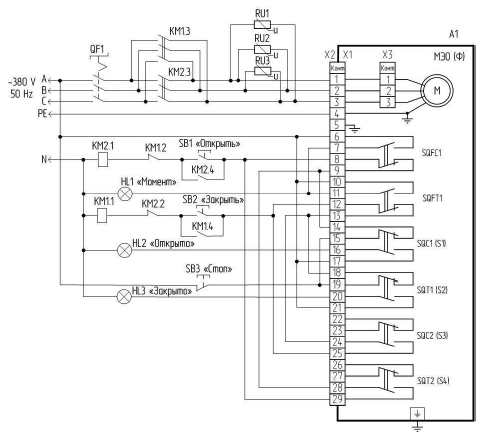
Рис типовая схема включения ИМ типа МЭО в ручном режиме управления.
КМ1, КМ2 – магнитные пускатели; HL1…HL3 –сигнальные лампы; RU1…RU3 – варисторы;
SB1…SB3 – кнопки управления; QF1 – выключатель автоматический; SQFC1– микровыключатель ограничителя момента открытия; SQFТ1– выключатель ограничителя момента закрытия; SQC1, SQC2– концевые выключатели открытия; SQТ1, SQТ2– концевые выключатели закрытия;
Магнитный пускатель КМ2.1 срабатывает при нажатии кнопки SB1 и включает ИМ на открывание. В цепь магнитного пускателя КМ1 включен контакт КМ1.2, который служит для электрической блокировки одновременного включения КМ1.1 и КМ2.1, и последовательно включен концевой выключатель ограничения момента открытия SQFC1 и конечный выключатель открытого положения SQC1. При повороте вала ИМ в крайнее положение концевой выключатель SQC1 размыкается, пускатель КМ1 обесточивается, ИМ останавливается, при этом нормально замкнутый контакт КМ1.2 разрешает включение ИМ на закрытие.
Цепь закрытия ИМ состоит из кнопки управления SB2, последовательно включенных блок-контакта КМ1.2 и выключатель ограничения момента открытия SQFТ1, конечного выключателя открытого положения SQТ1 и работает аналогично цепи открывания. Кнопка SB3 служит для останова ИМ в любом положении.
Кроме описанных цепей схема содержит цепи сигнализации открытого и закрытого положений ИМ.
Исполнительные механизмы - позиционеры
Исполнительные механизмы – позиционеры (ИМП) применяются для управления воздушными заслонками в системах вентиляции, шаровыми и седельными кранами и затворами в отопительных установках. Они могут осуществлять повороты или линейные перемещения регулирующих органов.
По логике работы ИМП бывают:
· Двухпозиционные, осуществляющие функции «открыть-закрыть»;
· Трехпозиционные, осуществляющие функции «открыть-нейтральное положение-закрыть»;
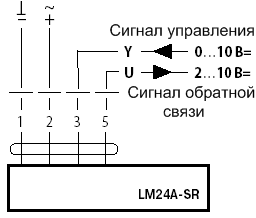
· Пропорциональные, перемещающие регулирующий орган пропорционально управляющему сигналу (обычно напряжение 0...10В или ток 0...20мА) и имеющие на выходе сигнал обратной связи.
· Настраеваемые, которые можно сконфигурировать с помощью переключателей под любую выше упомянутую логику, выбрать тип управляющего сигнала (ток или напряжение), его диапазон, осуществить другие настройки.
Основными производителями ИМП являются фирмыBelimo, Danfos,
ESBE.На рисунке хх показан внешний вид ИМП Belimo, на рисунке хх приведены схемы включения для различных типов ИМП.
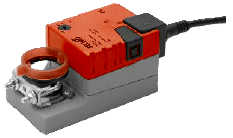
Рис Внешний вид исполнительного механизма Belimo.
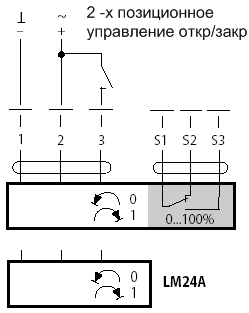
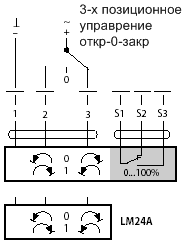
| а) | б) | в) |
Рис. Схемы подключения ИМП. а) – двухпозиционный ИМП, б) - трехпозиционный ИМП, в) – пропорциональный ИМП.
ИМП состоят из микродвигателя, редуктора и электронной схемы управления. На корпусе имеется переключатель для смены направления поворота, кнопка для механического разъединения ИМП с регулирующим органом (заменитель ручного привода), механический или цифровой указатель положения.
ИМП опционально могут комплектоваться дополнительным переключателями и потенциометрами обратной связи для индикации положения и обратной связи с контроллером.
Основными техническими характеристики ИМП, кроме логики функционирования, является номинальный крутящий момент (5...40н/м), угол поворота вала (обычно 90°) и напряжение питания (=24В, ~24...220В). Достоинствами ИМП является их адаптированость к работе с контроллерами.
Данфос
Шаговые двигатели
От обычного электродвигателя шаговый двигатель отличается тем, что кроме вращения с разной скоростью, реверса, может совершать поворот вала на заданный угол, причем этот угол может составлять несколько угловых минут. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Мощность шаговых двигателей может составлять от нескольких долей ватт до нескольких киловатт.
Принцип действия шаговых двигателей всех типов состоит в следующем. С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
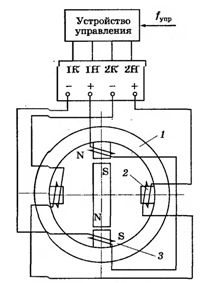
Рис. Схема, иллюстрирующая работу шагового двигателя
Дата добавления: 2016-12-09; просмотров: 7875;
Поиск по сайту
Узнать еще
- II. Особенности политического устройства Ирана
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ
- Автоматические контрольные устройства
- Активный контроль заготовок до обработки. Блокирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
