Режимы работы и основные требования
Постольку рельсовая линия используется как задающий элемент автоматизированной системы, методически удобно различать три вида внешних воздействий на рельсовую линию (рис. 2.34): непрерывные воздействия, связанные с изменением параметров рельсовой линии от внешних факторов (температуры, влажности и др.); дискретные воздействия, изменяющие структуру схемы замещения рельсовой линии при наложении поездного шунта, полном электрическом разрыве рельса и повреждении любого узла рельсовой цепи; непрерывные или дискретные помехи, которые не влияют на параметры или структуру схемы замещения цепи, а вызывают вследствие электрического и магнитного влияния или гальванической связи появление на входе приемника мешающих или опасных электродвижущих сил или токов.
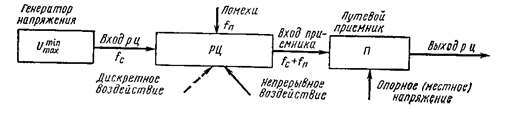
Рис. 2.34. Схема воздействий на рельсовую цепь
Реакция цепи на все эти воздействия проявляется в изменении уровня и фазы сигнала на входе путевого приемника.
При заданном сопротивлении приемника уровень сигнала определяется током или напряжением на входе, а фаза сигнала – фазовым сдвигом их относительно опорного (местного) напряжения Uм. В тех случаях, когда источником в РЦ являются трансформаторы и аккумуляторы с малым внутренним сопротивлением, можно практически считать, что эти источники имеют не зависящее от нагрузки напряжение U, т. е. являются генераторами напряжения. Поскольку ток на входе приемника Iп=U/Zп, то при U=const реакция цепи на внешнее воздействие характеризуется изменением сопротивления передачи всей цепи Zп.
Заданная реакция цепи на внешнее воздействие получится в том случае, если сопротивление Zп будет изменяться соответствующим образом при каждом воздействии. Такой характер изменения этого сопротивления достигается правильным выбором схем и параметров всех узлов РЦ, в том числе и путевого приемника.
В РЦ применяются приемники с дискретным выходом (рис. 2.35), граничные характеристики 1 которых определяются током (напряжением) срабатывания Iср и током (напряжением) несрабатывания Iнср, при этом Iнср=kвIcp, где kв < 1 - коэффициент возврата приемника.
Чем совершеннее дискретный приемник, тем выше его коэффициент возврата и тем уже область между его граничными характеристиками.
Дискретный приемник имеет два устойчивых состояния, соответствующих областям надежного срабатывания 2 и несрабатывания 3. Нижняя граница области 2 определяется рабочим уровнем сигнала Iр. В расчетах и исследованиях принимают Ip=kЗсрIcp, где kЗср - коэффициент запаса по срабатыванию (1,0 – для электромагнитных и индукционных реле при непрерывном питании, т.е. Up= Uср и Ip=Icp ; 1,2 - для импульсных путевых реле, т.е. Up = 1,2·Uср и Iр = 1,2·Icр).
Верхняя граница области 2 определяется допустимым для данного конкретного приемника сигналом перегрузки Iрпер=kперIр, где kпер>1–допустимый коэффициент перегрузки приемника берется по паспорту реле.
Верхняя граница области 3 характеризуется уровнем сигнала надежного несрабатывания Iннcр=kзнсрIнcр, где kзнср < 1 - коэффициент запаса по несрабатыванию приемника [0,6 - для электромагнитных реле; 0,9 - для индукционных (секторных) реле переменного тока и поляризованных импульсных реле постоянного тока]. Разрывы между граничными характеристиками приемника 1 и областями 2 и 3, определяемые коэффициентами запаса kзср и kзнср, повышают надежность работы приемника в реальных условиях, но снижают его эксплуатационный коэффициент возврата. С учетом этих коэффициентов вводится понятие о коэффициенте надежного возврата приемника kвн=kвkзнср/kзср.

Рис. 2.35. Граничная характеристика и области работы дискретного приемника
Указанные на рис. 2.35 граничные характеристики приемника справедливы лишь при постоянном напряжении генератора U. Если же напряжение генератора из-за изменения напряжения питающей сети колеблется от минимума до максимума, то расширяется область граничных характеристик приемника и, следовательно, уменьшается его коэффициент надежного возврата. В этом случае при расчетах и анализе рельсовых цепей принимается приведенный коэффициент надежного возврата k'вн=kвн/kи, где kи=Umax/Umin – допустимый коэффициент колебания напряжения источника 1,26 – для аккумуляторов, работающих в буфере с выпрямителями; 1,21 – для трансформаторов, питающихся от высоковольтных линий; 1,05 – для статических параметрических преобразователей частоты, которые обладают частичной способностью стабилизации выходного напряжения.
Сопротивление Zп исправной и свободной цепи во всем диапазоне непрерывного воздействия должно изменяться так, чтобы на вход приемника поступал сигнал, соответствующий области 2. При обоих видах дискретного воздействия сопротивление Zп должно увеличиться настолько, чтобы уровень сигнала на входе приемника достаточно снизился и находился в области 3. Последнее требование определяется характером дискретного приемника, который и при наложении шунта и повреждении рельса выдает на выходе информацию, эквивалентную занятости путевого изолированного участка.
Дискретное воздействие при обеих формах не является стабильным, и степень его влияния на сопротивление Zп зависит от дополнительных факторов: изменения координаты шунта на рельсовой линии, вероятности возникновения повреждения рельса в любой точке рельсовой линии, влияния обходных путей через смежные цепи и др.
Из-за указанных обстоятельств синтез схемы РЦ по заданной ее реакции на дискретные и непрерывные воздействия является довольно сложным и не всегда применимым для инженерных или учебных целей, тем более, что разрешимые задачи синтеза имеют множество решений. Поэтому при анализе исследуется реакция цепи на каждое воздействие отдельно и сложный процесс работы цепи расчленяется на три основных режима, соответствующих различным воздействиям: нормальный, когда цепь исправна и свободна; шунтовой, когда рельсовая линия шунтирована колесными парами; контрольный, когда рельсовая нить повреждена.
Так как во всех этих режимах рельсовая линия может находиться в любой фазе непрерывного воздействия, то для упрощения задачи выбирается такая его фаза, при которой создаются наиболее тяжелые условия для каждого из рассматриваемых режимов. Поскольку непрерывное воздействие выражается в изменении первичных параметров рельсовой линии, можно считать, что на условия работы цепи в каждом из режимов влияют независимые переменные величины: проводимость изоляции уи, сопротивление рельсов z, напряжение генератора U, относительная координата рельсовой линии р. Относительная координата рельсовой линии (рис. 2.36) p=x/l, где l - длина рельсовой линии, м; х – абсолютная координата рельсовой линии, численно равная расстоянию от координаты до приемного конца, м
Значения абсолютной и относительной координат изменяются в пределах: 0<x<l, 0<p<1.
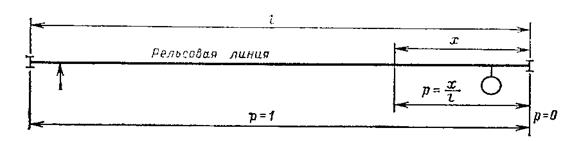
Рис. 2.36. Абсолютная и относительная координаты рельсовой линии
В нормальном режиме уровень сигнала на входе приемника должен быть не ниже уровня надежного срабатывания, поэтому критическим для этого режима является такой набор значений независимых переменных, при котором создаются наиболее тяжелые условия для передачи сигналов по рельсовой линии, т. е. когда затухание сигнала в ней будет максимальным: zmах (максимальное удельное сопротивление рельс), ymax (максимальная удельная проводимость изоляции) и Umin (минимальное напряжение источника питания).
Для нормального режима понятие о критической координате прямого смысла не имеет, так как при свободной и исправной РЦ на рельсовой линии нет ни шунта, ни поврежденного рельса. В этом случае можно считать, что для данной РЦ шунт и место повреждения рельса находятся вне пределов рельсовой линии, т. е. 0 > р > 1.
В шунтовом режиме, наоборот, уровень сигнала на входе приемника должен быть не выше уровня его надежного несрабатывания, поэтому критическим для этого режима является такой набор значений независимых переменных параметров, при котором создаются наиболее благоприятные условия для передачи сигналов по рельсовой линии: zmin, yиmin, Umax и pшкр., где pшкр критическая относительная координата наложения шунта (место, на которое при наложении шунта сопротивление передачи оказывается минимальным).
В контрольном режиме, так же как и в шунтовом, уровень сигнала на входе приемника не должен быть выше уровня его надежного несрабатывания, поэтому критический набор значений независимых переменных тоже должен соответствовать наилучшим условиям для передачи сигналов по рельсовой линии.
Однако при разрыве рельса создается совершенно иное изменение структуры схемы замещения рельсовой линии, чем при шунтовом режиме, из-за того, что при полном электрическом разрыве одного из рельсов электрически не разрывается тракт передачи сигналов, поскольку создаются обходные пути места разрыва по земле. Вследствие этого критическое значение проводимости изоляции gикp при контрольном режиме лежит в пределах gиmin <gикp<gиmаx. Поэтому критический набор значений независимых переменных для контрольного режима составляют zmах, gикp, Umax и ркпкр (табл. 2.2).
В связи с тем, что на перегонах с автоблокировкой (АБ) и на станциях с электрической централизацией (ЭЦ) накладываются устройства автоматической локомотивной сигнализации непрерывного действия, основные виды РЦ должны проектироваться с учетом режима АЛСН, при котором проверяется надежная работа локомотивных устройств по заданному (нормативному) току, который должен быть в рельсах под приемными катушками локомотива при вступлении его на самый удаленный участок от источника тока РЦ, т.е. при рш = 0.
По существу режим АЛСН является нормальным режимом РЦ по условиям работы локомотивного приемника, поэтому критический набор значений переменных параметров будет таким же, как и в нормальном режиме по путевому приемнику, но критическая координата рш = 0 (см. табл. 2.2).
Характер влияния указанных переменных величин на различные режимы зависит от схемы, параметров аппаратуры и длины рельсовой линии.
Таблица 2.2
Таблица критического набора переменных для режимов работы рельсовой цепи
| Режим рельсовой цепи | Критические значения переменных параметров | |||||
| Удельное сопротивление рельсов | Удельная проводимость изоляции | Напряжение источника | Относительная координата | |||
| Нормальный (по путевому приемнику) | Max | Max | Min | 0>p>1 | ||
| Шунтовой | Min | Min | Max | ршкр | ||
| Контрольный | Min | Критическая | Max | ркпкр | ||
| АЛС (нормальный режим по локомотивному приемнику) | Max | Max | Min | pш=0 | ||
Кроме того, действие генератора при анализе и синтезе цепей должно проверяться в режиме короткого замыкания линии, т. е. при нахождении поездного шунта нулевого сопротивления на питающем конце (рш = 1). Такая проверка особенно важна для цепей переменного тока, так как напряжение генератора и сопротивление ограничителя в этих цепях могут варьироваться в широких пределах, отчего условия работы генератора будут резко изменяться. Требования режима короткого замыкания во многих случаях являются определяющими для выбора аппаратуры питающего конца и особенно параметров ограничителя.
Таким образом, наиболее сложные виды РЦ проектируются с учетом работы путевого и локомотивного приемников в четырех режимах: нормальном, шунтовом, контрольном и АЛС, а по условиям работы генератора – с учетом режима короткого замыкания линии.
Помимо этого, РЦ должны защищаться от различного рода помех, которые могут вызывать подачу ложной информации о свободном или занятом состоянии изолированного участка. Помехи первого вида особенно опасны и обычно появляются в цепях с непрерывным питанием: в цепях постоянного тока – от блуждающих постоянных токов или переходных токов от сетей поездного освещения или отопления, а в цепях переменного тока – от гармонических составляющих тягового тока или токов утечки осветительных сетей. Помехи второго вида проявляются при импульсном или некоторых видах кодового питания.
Для защиты РЦ от помех на электрифицированных участках приходится усложнять их схемы или переходить на сигнальный ток другой частоты и коренным образом менять схему РЦ.
По действующим в РФ техническим условиям в РЦ должно также контролироваться появление замыкания в изолирующих стыках. В тех случаях, когда РЦ выполняют также функции телемеханических каналов связи, параметры их элементов выбирают так, чтобы искажения электрических сигналов, несущих информацию, не превышали установленных допусков.
При разработке новых и усовершенствовании существующих схем необходимо стремиться к тому, чтобы каждая РЦ была не только совершенной с технической точки зрения и обеспечивала все требования, вытекающие из условий безопасности движения поездов, но и являлась бы в максимальной мере экономичной – имела возможно большую длину, потребляла малое количество электроэнергии, не требовала большого расхода кабеля и применения дорогой аппаратуры, не нуждалась в больших затратах средств и времени на обслуживание и пр., а также была универсальной, т. е. могла применяться в различных эксплуатационных условиях.
Дата добавления: 2016-11-29; просмотров: 2212;
Поиск по сайту
Узнать еще
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- C учетом изменения статической работы балки
- Cущность организации и ее основные признаки
- I. ГИГИЕНИЧЕСКИЕ ТРЕБОВАНИЯ К МЕСТАМ ЗАНЯТИЙ
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- I. ОСНОВНЫЕ ПОЛОЖЕНИЯ
- I. Политический режим: понятие, сущность и основные типы.
- I. Режимы работы электротехнических устройств.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
