Формулировка метода конечных элементов
По способу получения основных, т. е. разрешающих, уравнений различают четыре основных вида метода конечных элементов: прямой, вариационный, взвешенных невязок и энергетического баланса. Из приведенных видов МКЭ в строительной механике особенно актуальны вариационный метод и метод взвешенных невязок Галеркина.
Рассмотрим Вариационный метод. Данный метод основан на принципах стационарности некоторой переменной, зависящей от одной или нескольких функций (такая переменная носит название функционала). Применительно к механике деформируемого твердого тела эта переменная представляет собой потенциальную (функционал Лагранжа) или дополнительную (функционал Кастилиано) энергию системы или формируется на основе этих двух энергий (функционалы Хеллингера-Рейсснера, Ху-Вашицу). Если в функционал подставить аппроксимирующие выражения искомых функций и применить к нему экстремальные принципы (соответственно принцип Лагранжа, принцип Кастилиано и т. д.), получим систему алгебраических уравнений, решением которой будут значения узловых неизвестных.
Вариационный принцип Лагранжа: Потенциальная энергия приобретает стационарные значения на тех кинематическе возможных перемещениях, которые удовлетворяют заданным граничным условиям и условиям равновесия сил.
В отличие от прямого вариационный метод может одинаково успешно применяться как к простым, так и сложным задачам.
И так, рассмотрим трехмерный объект произвольной формы, находящийся в равновесном состоянии под воздействием некоторой нагрузки (рис. 4.1). Силы трения, действующие на поверхность (Поверхностные силы), обозначим - p, массовые силы (объемные силы) – G. В общем случае эти силы раскладываются на компоненты, параллельные осям координат:
G=  , p=
, p=  . (1)
. (1)
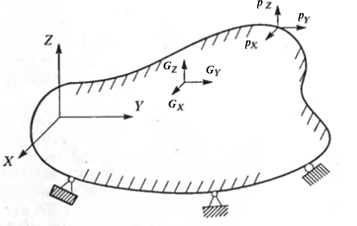
Рис. 4.1. Трехмерный объект с внешними силами
Обозначим смещение произвольной точки объекта (X,Y,Z) по сравнению с конфигурацией в отсутствие нагрузки символом U. Тогда
UT=[U(X,Y,Z) V(X,Y,Z) W(X,Y,Z)]. (2)
Смещения U приведут к возникновению деформации
εT=[ εXX εYY εZZ εXY εYZ εZX ] (3)
и соответствующих напряжений
σT=[ σX σY σZ τXY τ YZ τ ZX ]. (4)
Необходимо рассчитать U, ε, σ в точке (X,Y,Z) по заданным внешним силам. Выражение для полной потенциальной энергии упругого тела описывается выражением:

Э - энергия деформации;
А - работа приложенных массовых и поверхностных сил.
Три последних слагаемых уравнения (5) описывают внешнюю работу, выполняемую реальными силами G,p на виртуальных перемещениях  .
.
Верхний индекс S у вектора означает виртуальное смещение на поверхности. Напряжения вычисляются через деформации по соответствующим материальным уравнениям.
Получим из уравнения (5) уравнения метода конечных элементов. Начнем с аппроксимации объекта, изображенного на рис. 4.1, сеткой конечных элементов. Элементы соединяются друг с другом в узловых точках, которые находятся на их границах. Смещение в любой точке с координатами (x, y, z) в локальной системе координат элемента считается функцией смещений в узловых точках.
То есть для элемента т высказывается предположение, что

где H — интерполяционная матрица смещений (функций формы), а  — вектор смещений на всех узлах. Если общее количество узлов равно N вектор запишется следующим образом:
— вектор смещений на всех узлах. Если общее количество узлов равно N вектор запишется следующим образом:

Это выражение можно переписать так:

Хотя в уравнении (8) перечисляются смещения всех узлов, а, следовательно, эти смещения входят и в выражение (6), для каждого конкретного элемента смещения внутри него определяются только смещениями в его собственных узлах. В уравнение же (6) все узлы вошли потому, что это облегчает процесс объединения матриц отдельных элементов в матрицу структуры в целом, как будет показано ниже.
Уравнение (6) позволяет вычислить деформации:

Строки матрицы деформаций-смещений  из уравнения (9) получаются дифференцированием и объединением строк матрицы H(m).
из уравнения (9) получаются дифференцированием и объединением строк матрицы H(m).
Теперь мы можем записать и выражения для напряжений внутри каждого элемента:

где C — матрица упругости элемента т (матрица Гука), а  — начальное напряжение внутри элемента. В структуре, состоящей из разных материалов, для каждого элемента можно задать свою собственную матрицу упругости.
— начальное напряжение внутри элемента. В структуре, состоящей из разных материалов, для каждого элемента можно задать свою собственную матрицу упругости.
Перепишем уравнение (5) в виде суммы интегралов по объемам и поверхностям отдельных элементов:

где т изменяется от 1 до полного количества элементов в системе.
Подстановка (6), (9) и (10) в (11) даст следующее выражение:

где поверхностные интерполяционные матрицы смещений  получаются из объемных интерполяционных матриц смещений
получаются из объемных интерполяционных матриц смещений  подстановкой координат поверхности элемента.
подстановкой координат поверхности элемента.
Обозначим

R=RВ+RS-Ro;(14)



Минимизация энергии П приводит к уравнению:
которое с учетов введенных обозначений запишется так:
KU=R, (19)
Обратите внимание, что суммирование интегралов по объемам отдельных элементов в формуле (14) выражает тот факт, что матрица жесткости набора элементов как целого получается сложением матриц жесткости элементов K(m). Аналогичным образом, вектор Rвобъемной силы, действующей на все тело, получается суммированием векторов объемных сил, действующих на отдельные элементы. Тем же путем вычисляются и векторы прочих сил.
Выражение (19) описывает статическое равновесие. Если приложенные силы изменяются во времени, это выражение применимо к любому конкретному моменту. Однако при быстром приложении нагрузки необходимо учитывать силы инерции. По принципу Даламбера силы инерции отдельных элементов могут быть добавлены к массовым силам. Если предположить, что ускорение в любой точке элемента связано с ускорениями в узловых точках матрицей H(m) подобно смещениям, вклад массовых сил в вектор нагрузки К будет выражаться так:

где  — ускорения узловых точек, а
— ускорения узловых точек, а  — массовая плотность элемента т.
— массовая плотность элемента т.
Подстановка (20) вместо (15) в (19) дает новое уравнение равновесия:
M  +KU=R, (21)
+KU=R, (21)
где М — матрица масс.
Обратите внимание, что U и R в уравнении (21) являются функциями времени.
Демпфирующие силы могут быть учтены как дополнительный вклад в массовые силы, что позволяет описать эффект демпфирования (затухания). Уравнение (20) при этом принимает новый вид:

где  — вектор скоростей узловых точек, а
— вектор скоростей узловых точек, а  — демпфирующий коэффициент для элемента т.
— демпфирующий коэффициент для элемента т.
Уравнение равновесия приобретает вид
M +C  +KU=R, (23)
+KU=R, (23)
где С — матрица демпфирования.
На практике матрицу С обычно конструируют из массовой матрицы и матрицы жесткости на основании экспериментальных данных по демпфированию в материале, потому что определить параметры демпфирования отдельных элементов достаточно сложно.
Дата добавления: 2019-09-30; просмотров: 1092;
Поиск по сайту
Узнать еще
- B — число подмножеств, то частное а : b - это число элементов в каждом подмножестве.
- I. Понятие о методах воспитания.
- II. Стоимость отдельных элементов капитала
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
