Транспортировка деталей
В промышленности распространенной операцией является транспортировка листового материала. Сложенный в стопы листовой материал необходимо доставлять в зону его обработки (рис. 8.8).
Автоматизация этой операции осуществляется с помощью использования вакуумных захватных устройств.
Рис. 8.8. Схема транспортировка листового материала
1 – листовой материал, 2 – траектория транспортировки,
3 – зона обработки
Листы из стопы по очереди захватываются манипуляционной системой, схема которой дана на рис. 8.9.
Рис. 8.9. Схема транспортной манипуляционной системы
1 - лист, 2 - вакуумное захватное устройство, 3 – вакуумный коллектор,
4 – крепление, 5 – вакуумный клапан, 6 – вакуумная линия,
7 – вакуумный насос, 8 – датчик вакуума, 9 – транспортный привод
Транспортный привод прижимает рабочую поверхность вакуумных захватных устройств к поверхности листа. После этого вакуумный клапан соединяет полость коллектора с вакуумным насосом, и захватные устройства с помощью вакуума притягивают поверхность листа к своим рабочим поверхностям. Если датчик вакуума показывает номинальный уровень вакуума в коллекторе, то транспортный привод начинает реализовывать перенос листа в зону обработки. После помещения листа в зону обработки вакуумный клапан соединяет коллектор с атмосферой, вакуумные захватные устройства освобождают лист и возвращаются в исходное положение.
Для определения рабочих параметров транспортной манипуляционной системы необходимо учитывать материал, размер, качество поверхности и положение листов, рассчитать его массу, допустимые ускорения и требуемый уровень вакуума. После этого подбираются стандартные компоненты системы и режим ее работы.
Такой же принцип транспортировка используется для перемещения хрупких объектов. Пример системы транспортировки фарфоровых чашек представлен на рис. 8.10.
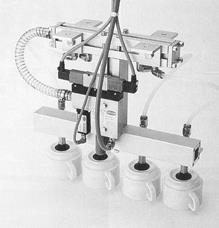
Рис. 8.10. Система транспортировки фарфоровых чашек
Дозирование
Дозирование жидкостей и расплавленных металлов, например, в литейном производстве можно производить пневматической системой, схема которой приведена на рис. 8.13.
Рис. 8.13. Схема дозирования
1- резервуар, 2 – жидкость, 3 – рычаг с ковшом, 4 – силовой цилиндр,
5 – принимающую емкость
Рычаг с ковшом приводится в движение силовым цилиндром. Объем ковша соответствует требуемой дозе жидкости, которая забирается в верхнем положении штока силового цилиндра. При перемещении штока в нижнее положение жидкость из ковша автоматически переливается в принимающую емкость.
Дата добавления: 2021-02-19; просмотров: 609;
Поиск по сайту
Узнать еще
- А) нанесение осей и контуров здания; б, в) разметка и вычерчивание деталей фасада; г) нанесение размеров и оформление
- А) сетка координационных осей; б) привязка стен, разметка перегородок; в) вычерчивание деталей; г) нанесение размеров и оформление
- Автоматические и полуавтоматические линии по обработке деталей и изделий
- Автоматический контроль точности размеров и формы деталей. Разновидности контроля. Использование информации, полученной при контроле,
- Архитектурных и конструктивных деталей
- БАЗИРОВАНИЕ ДЕТАЛЕЙ
- Базирование деталей на операциях механической обработки
- Базування деталей у втулках та мембранних патронах .

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
