ИЗУЧЕНИЕ ЭТАПА СТРУКТУРНОГО СИНТЕЗА И АНАЛИЗА ПРОЕКТНОГО РЕШЕНИЯ
(РАЗРАБОТКА ТЕХНИЧЕСКОЙ КОНЦЕПЦИИ)
Цель занятия – освоение методики разработки технической концепции (технического предложения) проектируемого изделия.
Задачи занятия:
1. Изучение этапа подготовки исходных данных для синтеза передаточного механизма (формирование технического задания).
2. Разработка структуры передаточного механизма (ПМ) и его энергетический анализ.
3. Изучение этапа разбивки iобщ между ступенями приводного механизма.
4. Кинематический и силовой расчеты ПМ, анализ результатов расчетов в бригаде.
Как отмечалось в работе № 1, на старте этапа синтеза и анализа вырабатывается концептуальная основа конструкции проектируемого изделия. Создание концепции конструкции начинается с функционального анализа и изучения машин и механизмов, аналогичных проектируемым. Они проводятся по специальной литературе, атласам конструкций, чертежам, моделям, опытным и промышленным образцам, патентам, заявкам на изобретения и т.п. Системы автоматизированного проектирования предполагают наличие такой информации в концентрированном виде непосредственно в информационных структурах системы. Ранее также отмечалось, что концептуальное решение наиболее часто первоначально фиксируется в виде структурной, кинематической, конструктивной и других схем или их комбинаций, выполняемых, как правило, параллельно. Схемы являются основными конструкторскими документами этого этапа.
1. Подготовка исходных данных для синтеза передаточного механизма
Выше отмечено, что машины имеют разнообразную структуру. Типовые структуры машин непрерывного транспорта, принятых для КП, обычно строят по простейшим схемам (рис. 4 а), которые состоят из двигателя, передаточного механизма и приводного вала рабочего органа. Совокупность этих элементов машины называют приводом. В курсовых проектах в качестве двигателей обычно используют серийные электродвигатели, а для элементов рабочего органа – серийные узлы приводных валов ленточных, пластинчатых, скребковых и других конвейеров. Разработка структуры передаточного механизма входит в задачу проектанта.
Еще раз подчеркнем, что структура технического объекта, прежде всего, определяется функциональными требованиями. На долю передаточного механизма в простейших конвейерах, как отмечалось выше, приходится одна прямая функция – приведение частоты вращения вала двигателя к частоте вращения вала рабочего органа с соответствующим изменением крутящего момента. Параллельно с прямой функцией при структурном синтезе также решается вопрос о желательном расположении осей валов в пространстве и относительно друг друга в соответствии с требованиями общей компоновки механизма, машины в целом. К примеру, выходной вал механизма должен быть ориентирован в соответствии с приводным валом рабочего органа машины. В таких конвейерах как ленточные, пластинчатые, скребковые приводные валы располагаются горизонтально, а в подвесных – вертикально. Ориентация входного и других валов ПМ будет определяться удобством расположением двигателя в механизме, машине и выбранным типом передач. Анализ других, отмеченных в лабораторном занятии №1, функций (регулирование скорости вращения приводного вала, получение реверсивного движения, приведение в движение от одного двигателя нескольких исполнительных механизмов) в целях упрощения первой конструкторской работы не предусматривается.
Кроме функциональных требований при назначении структуры должны быть учтены дополнительные требования и ограничения, которые в дальнейшем позволят оптимизировать конструкторское решение по энергоемкости, материалоемкости, экономичности. Эти вопросы поднимаются как на этапе формирования ТЗ, так и ТК. Но на данных стадиях проектирования они могут быть решены лишь на идеологическом уровне в форме сравнения альтернативных вариантов по возможности получения желаемых результатов. Параметрическая оценка соблюдения указанных требований осуществляется на последующей стадии параметрического синтеза. Исходным параметром указанной прямой функции передаточного механизма является его общее передаточное отношение, которое определяется отношением частот вращения ведущего nвщ и ведомого nвд валов. Для проектируемого механизма модуль требуемого общего передаточного отношения (т.е. без учета его знака)
 (1)
(1)
Что касается частоты вращения вала рабочего органа (nро), то, как отмечено выше, она вычисляется в технологическом расчете параметров машины на основе оценки скорости выполнения технологической операции, который предшествует конструированию ТО.
Частота вращения вала двигателя (nд) определяется типом используемого мотора. В рассматриваемых в КП стационарных машинах с нерегулируемой скоростью рабочего органа наиболее часто применяют электродвигатели переменного тока с короткозамкнутым ротором, как правило, обладающие минимальной энерго- и материалоемкостью и простотой обслуживания. Двигатели указанного типа выпускаются промышленностью с синхронной частотой вращения nс (частотой вращения магнитного поля) 3000, 1500, 1000, 750 об/мин. Этот набор частот при промышленной частоте тока 50 Герц достигается за счет количества пар полюсов соответственно 1, 2, 3 и 4. Естественно, что увеличение пар полюсов приводит к увеличению размеров мотора, его массы и стоимости. Поэтому, с позиции технико-экономических показателей двигателя целесообразно использование его высокоскоростных исполнений. Однако при этом возрастает требуемое передаточное отношение, сложность и стоимость передаточного механизма. Естественно, что совершенство привода в целом будет характеризоваться суммарными технико-экономическими показателями двигателя и ПМ. Выявление наилучшего решения среди альтернативных вариантов достигается их сопоставительным анализом. По причине изложенного обстоятельства величина nд является важной переменной проектирования при конструировании привода машин. Основной задачей первой конструкторской работы является освоение методологии процесса проектирования, а введение этой переменной существенно усложнит ее решение. По этой причине целесообразно исключить данную ПП и ориентироваться на средний диапазон nс=1500и 1000 об/мин. Фактическая частота вращения вала двигателя nд отличается от nс на величину скольжения, величина которого устанавливается непосредственно для каждого типоразмера двигателя и приводится в каталогах двигателей. Поэтому определение фактического передаточного отношения возможно лишь после предварительного установления типоразмера двигателя.
Предварительный подбор электродвигателей осуществляется по требуемой мощности установившегося движения Ртр.д. и частоте вращения. Известно, что требуемая мощность на рабочем органе при установившемся движении определяется скоростью движения V и соответствующей силой статического сопротивления Fcc этому движению.
 (2)
(2)
Именно требуемую мощность и содержит задание на КП (табл. 2 ). Для конкретизации операций по синтезу ПМ к примеру, примем Рmp.p.o.=2,85 кВт. В этом выражении сила статических сопротивлений Fcc (см. практическое занятие № 1) имеет размерность [кН], а скорость V - [м/с]. Для установления требуемой мощности двигателя Ртр.д. необходимо учесть потери энергии в кинематической цепи передаточного механизма.
 (3)
(3)
В этом выражении ηобщ. – общий кпд кинематической цепи, равный произведению кпд всех последовательно установленных её элементов, в которых имеют место потери энергии,
 .
.
Здесь η1, η2,…, ηn – кпд отдельных элементов кинематической цепи. Индексы 1, 2, …. ,n можно поставить по условной договорённости, начиная с быстроходного элемента. Значения этих коэффициентов различных механизмов и их элементов зависят от многих факторов, часто неизвестных на начальном этапе проектирования. Поэтому при выполнении синтеза и анализа проектного решения обычно используют ориентировочные усреднённые значения кпд, приводимые в справочной литературе. При проведении лабораторного занятия и выполнении КП можно использовать значения кпд, данные в таблице 3.
Естественно, что вычисление общего кпд, требуемой мощности, а, следовательно, и значения предварительного передаточного отношения невозможно без установления состава ПМ. Уравнение (3) имеет два неизвестных и, как отмечено в лаб. р. № 1, решается в режиме последовательных приближений (итераций). В подобной ситуации сначала определяют ориентировочное значение общего передаточного отношения по синхронной частоте вращения вала двигателя, например при nс = 1000 мин-1 и частоте вращения nр.о. = 12,8 мин-1
 .
.
Ориентировочному значению  для исключения путаницы присвоен индекс «штрих». После этого назначают структуру ПМ, вычисляют для механизма предложенной структуры кпд, подбирают двигатель, устанавливают фактическую частоту вращения его вала и уточняют передаточное отношение. Если уточненное значение
для исключения путаницы присвоен индекс «штрих». После этого назначают структуру ПМ, вычисляют для механизма предложенной структуры кпд, подбирают двигатель, устанавливают фактическую частоту вращения его вала и уточняют передаточное отношение. Если уточненное значение  невозможно реализовать посредством механизма предложенной структуры, то ее корректируют соответствующим образом.
невозможно реализовать посредством механизма предложенной структуры, то ее корректируют соответствующим образом.
Таблица 3. Ориентировочные значения кпд распространённых элементов кинематических цепей
| Наименование элементов кинематической цепи | КПД | |||||
| Одна ступень зубчатого зацепления с учётом потерь в опорах а) цилиндрическая б) коническая в) волновая закрытая | Закрытые передачи при жидкой смазке | Открытые передачи при густой смазке | ||||
| 6, 7 степени точности | 8, 9 степени точности | |||||
| 0,99 ÷ 0,98 0,98 ÷ 0,96 | 0,975 ÷ 0,97 0,96 ÷ 0,95 | 0,96 ÷ 0,95 0,95 ÷ 0,94 | ||||
| 0,8 ÷ 0,9 при i = 250 ÷ 80 | ||||||
| Одна ступень закрытой червячной передачи с учётом потерь в опорах | При числе заходов червяка | |||||
| z1 = 1 ( i > 32) | z1 = 2 ( i = 16 ÷ 32) | z1 = 4 ( i = 8 ÷16) | ||||
| 0,75 ÷ 0,6 | 0,87 ÷ 0,75 | 0,92 ÷ 0,87 | ||||
| Цепная двухзвёздная передача а) роликовой цепью б) зубчатой цепью | Закрытая | Открытая | ||||
| 0,95 ÷ 0,97 0,98 ÷ 0,99 | 0,92 ÷ 0,94 0,95 ÷ 0,96 | |||||
| Ременная передача а) плоским ремнём б) клиновым ремнём | 0,95 ÷ 0,97 0,92 ÷ 0,96 | |||||
| Муфты компенсирующие | 0,985 ÷ 0,995 | |||||
| Одна пара подшипников а) качения или скольжения при жидкостном трении б) скольжения при полужидкостном трении | 0,99 ÷ 0,995 0,98 ÷ 0,99 | |||||
| Подвижные и неподвижные блоки и приводные барабаны на опорах а) скольжения б) качения | 0,95 ÷ 0,97 0,97 ÷ 0,98 | |||||
2. Разработка структуры передаточного механизма и его энергетический анализ
Операция синтеза ПМ становится доступной после вычисления  . В механизмах вращательного движения их функцию по преобразованию частоты вращения выполняют с помощью разнообразных механических передач: зубчатых, червячных, цепных, ременных и т.п. Задача синтеза передаточного механизма заключается в назначении типа передачи или их комплекса, поставленных последовательно, которые могут реализовать требуемое передаточное отношение. Каждый из упомянутых механизмов обладает вполне определенным наиболее употребительным iср и максимально допустимым imax значениями. Значения iср и imax установлены из длительной инженерной практики конструирования передач (табл.4). Теоретически передаточное отношение передач может превосходить указанные в таблице величины, однако при этом существенно возрастают их размеры и увеличивается материалоемкость, что делает применение передач с подобными параметрами нецелесообразным [7].
. В механизмах вращательного движения их функцию по преобразованию частоты вращения выполняют с помощью разнообразных механических передач: зубчатых, червячных, цепных, ременных и т.п. Задача синтеза передаточного механизма заключается в назначении типа передачи или их комплекса, поставленных последовательно, которые могут реализовать требуемое передаточное отношение. Каждый из упомянутых механизмов обладает вполне определенным наиболее употребительным iср и максимально допустимым imax значениями. Значения iср и imax установлены из длительной инженерной практики конструирования передач (табл.4). Теоретически передаточное отношение передач может превосходить указанные в таблице величины, однако при этом существенно возрастают их размеры и увеличивается материалоемкость, что делает применение передач с подобными параметрами нецелесообразным [7].
2.1. Структурный синтез передаточного механизма
В соответствии с данными табл. 4 для реализации  , принятого в качестве примера, можно использовать ряд схем с различным количеством ступеней.
, принятого в качестве примера, можно использовать ряд схем с различным количеством ступеней.
Из одноступенчатых механизмов назовем червячный (imax= 80) (рис.8ж) и волновой зубчатый (iср = 80 ÷ 250) редукторы. Применение других одноступенчатых механизмов невозможно в силу iтр.общ.>> imax. Анализ свойств отмеченных двух вариантов обнаруживает их существенные недостатки: низкий кпд в первом, сложность изготовления, и сравнительно высокую стоимость во втором. Это обстоятельство делает целесообразным исследовать возможность применения многоступенчатых механизмов, для которых  .
.
Из двухступенчатых схем при требуемом iтр.общ. можно использовать планетарный со сдвоенным сателлитом редуктор (рис.8д) и комбинированный планетарно зубчатый (рис.8е) механизм, у которых максимальные значения передаточных отношений превосходят iтр.общ. . Как видно из таблицы для двухступенчатых механизмов с простой не планетарной зубчатой передачей imax  и поэтому они не могут быть использованы в рассматриваемом примере.
и поэтому они не могут быть использованы в рассматриваемом примере.
Таблица 4. Рекомендуемые значения передаточных отношений различных типов передач и механизмов
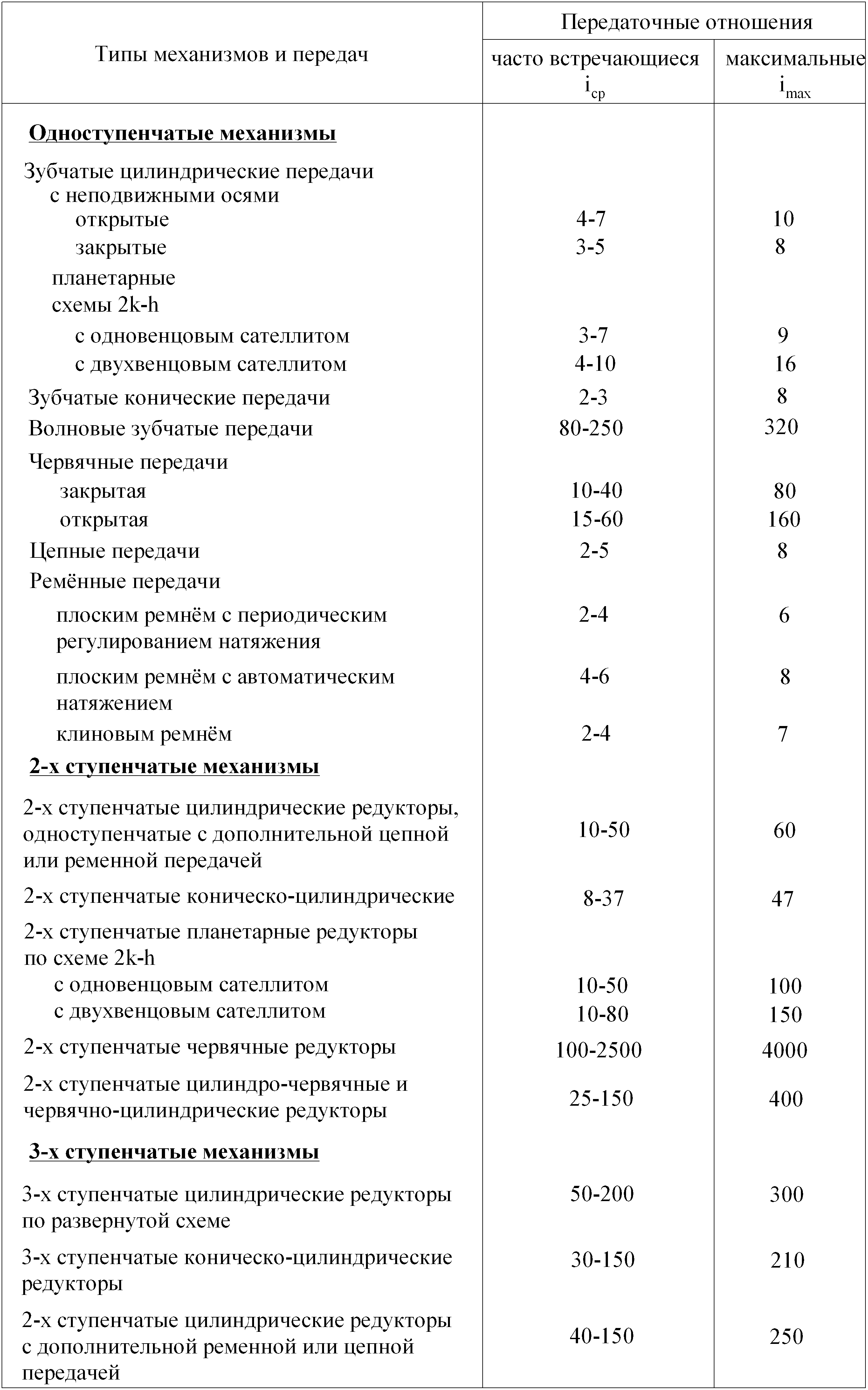
Использование трехступенчатых передаточных механизмов также возможно при обсуждаемом iтр.общ. На рис. 8 представлены трехступенчатый цилиндрический (рис. 8а), коническо-цилиндрический трехступенчатый (рис.8б) редукторы, а также двухступенчатые редукторы в комбинации с цепной (рис. 8в) и ременной (рис. 8г) передачами. Правомерность применения всех показанных на рисунке схем доказывает кинематический анализ, результаты которого приведены в таблице 5 (назначенные передаточные отношения отдельных передач не выходят за границы imax).
Важно подчеркнуть, что жестких границ переходов от одноступенчатых механизмов к двухступенчатым, а от них к трехступенчатым и т.д. не существует. Вследствие этого обстоятельства в приграничных зонах iтр рациональнее исследовать проектную ситуацию и установить наиболее рациональное число ступеней механизма в каждом конкретном случае. Обозначенная задача в КП рассматриваемых дисциплин не предусматривается. Однако в пределах бригады для индивидуальной проработки возможна постановка подобной задачи.
Системы автоматизированного проектирования приводов должны содержать библиотеки стандартных макросов типовых приводов с анализом показателей их качества и основных направлений их совершенствования. Поиск нужных решений в подобных библиотеках осуществляется с помощью интерактивного диалога, позволяющего проектанту быстро получить качественную информацию для решения поставленной задачи. Идея построения подобной библиотеки и диалога поиска нужного варианта сформулирована ниже.
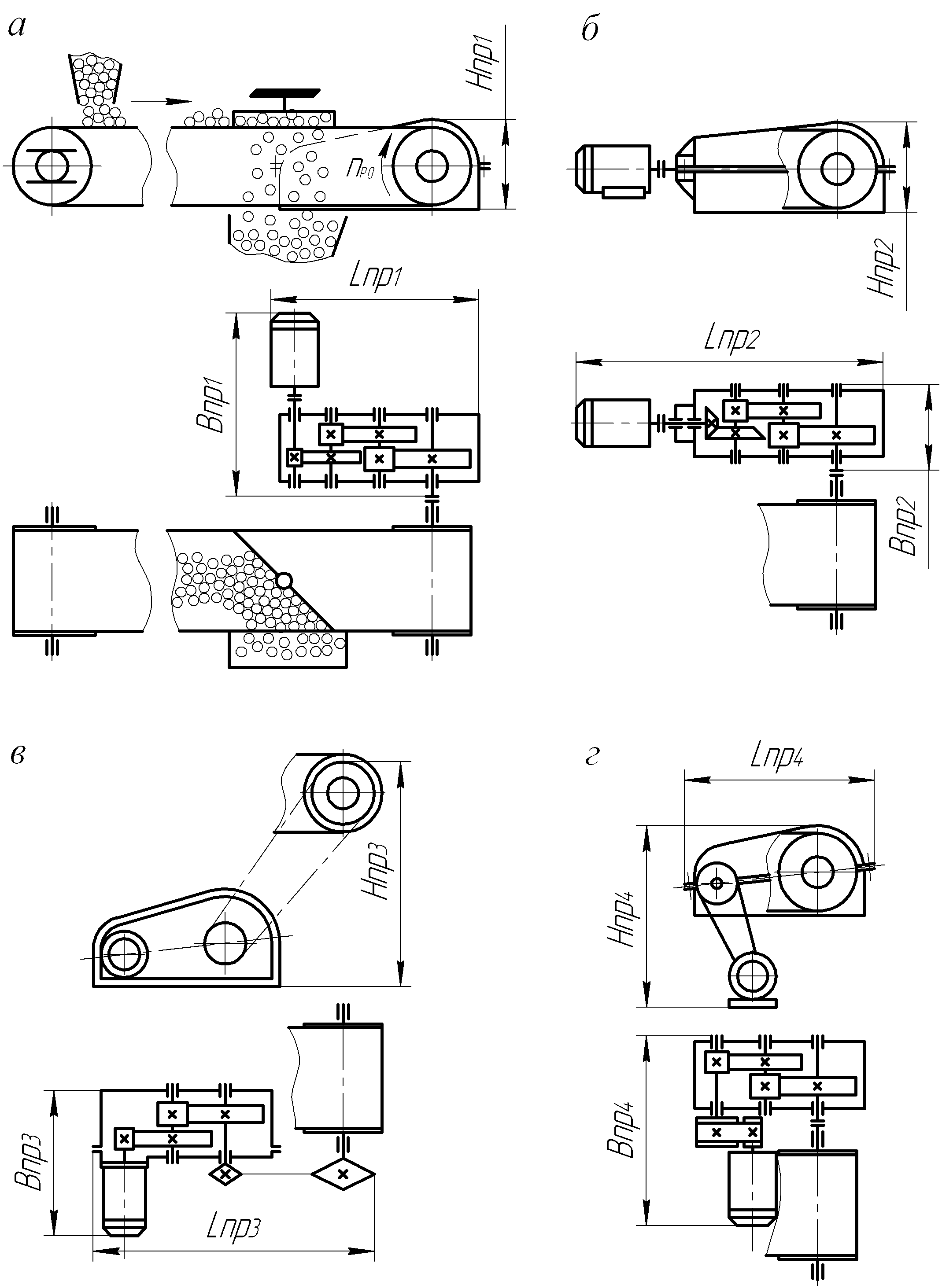
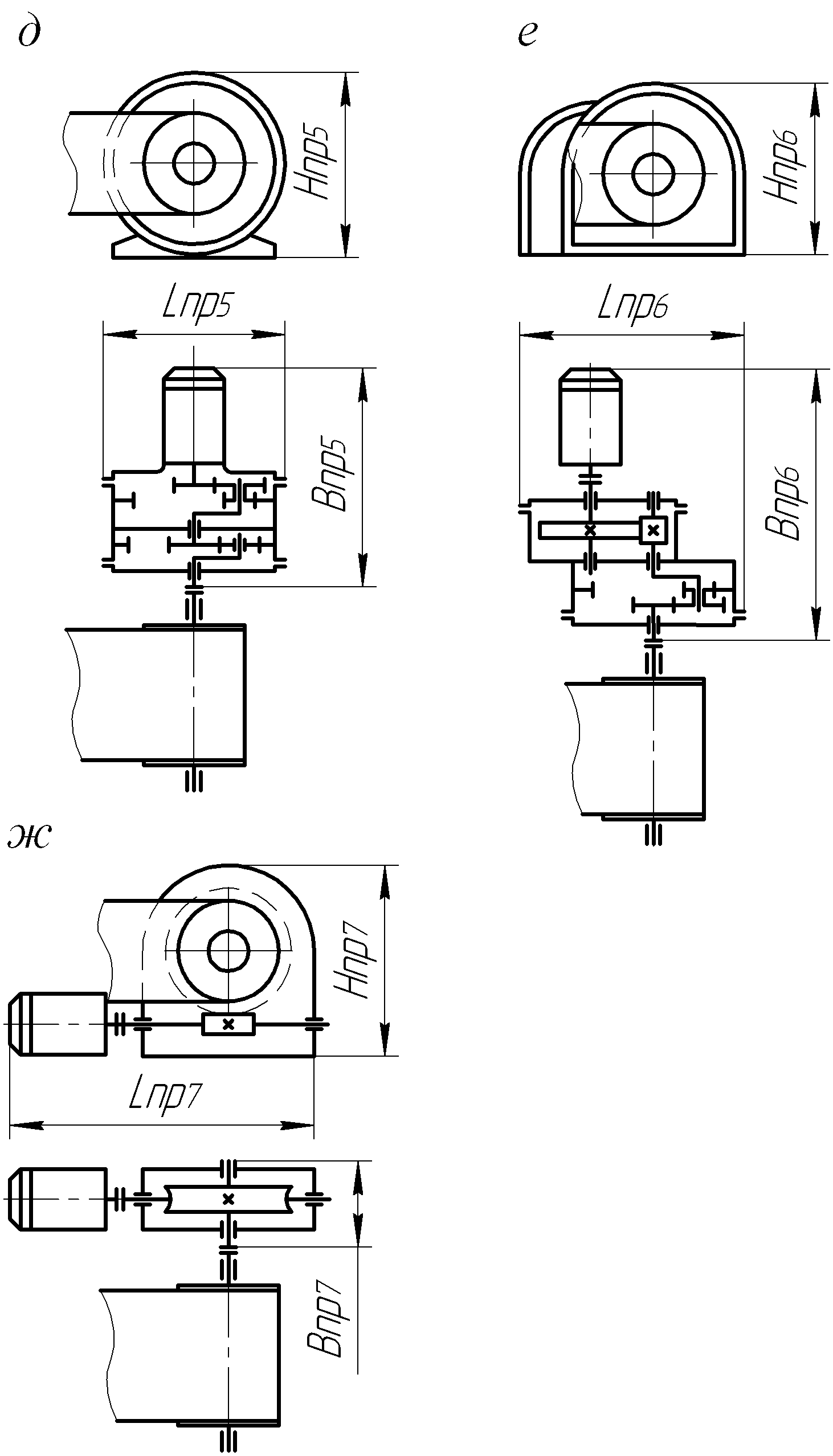
Рис. 8. Схемы приводных станций
а - с трёхступенчатым цилиндрическим редуктором,
б - с трёхступенчатым коническо-цилиндрическим редуктором,
в - с двухступенчатым редуктором и цепной передачей,
г - с двухступенчатым редуктором и ремённой передачей,
д - с планетарным редуктором со сдвоенным сателлитом,
е - с планетарно-зубчатым редуктором,
ж - с червячным редуктором.
Таблица 5. Результат предварительного кинематического анализа предложенных механизмов для реализации iтр.общ. = 78,12
| Варианты передаточного механизма | Передаточные отношения | ||||
| Рекомендуемое в одной ступени | Возможные варианты сочетания ii отдельных ступеней | ||||
| 1-ой ступени | 2-ой ступени | 3-ей ступени | Общее | ||
| 1.Трёхступенчатый цилиндрический редуктор (рис.8а) | iц = 3÷5 iц mах = 8 | iц1 = 6 | iц2 = 4,4 | iц3 = 2,96 | iтр.общ = 78,12 |
| 2.Трёхступенчатый коническо-цилиндрический редуктор (рис.8б) | iц = 3÷5 iк = 2÷3 iк max = 2÷3 iц mах = 8 | iк1 = 5,2 | iц2 = 4,4 | iц3 = 3,41 | |
| 3.Двухступенчатый цилиндрический редуктор с цепной передачей (рис.8в) | iц = 3÷5 iц мах = 8 iцеп = 2÷5 iцеп max = 8 | iц1 = 6 | iц2 = 4,1 | iцеп3= 3,18 | |
| 4.Двухступенчатый цилиндрический редуктор с ремённой передачей (рис.8г) | iрем = 2÷4 iрем max = 6 iц = 3÷5 iц mах = 8 | iрем1 = 3,2 | iц2 = 6,0 | iц3 = 4,07 | |
| 5.Червячный Редуктор (рис.8ж) | iчер = 10÷40 iчер max = 80 | iчер1 = 78,12 | - | - | |
| 6.Двухступенчатый планетарный редуктор (рис.8д) | iпл = 3÷10 iпл max = 16 | iпл1 = 9,8 | iпл2 = 7,97 | - | |
| 7.Планетарно-цилиндрический редуктор (рис.8е) | iпл = 3÷10 iпл max = 16 iц mах = 8 iц = 3÷5 | iпл1 =10 | iц2 = 7,81 | - | |
| Примечание. Возможные сочетания предварительных значений передаточных отношений отдельных ступеней ПМ принимались лишь из соображений их соответствия рекомендуемым в табл. 4. средним и максимальным значениям. При этом на быстроходных ступенях их значения принимались большими, чем на более нагруженных тихоходных с целью кинематической разгрузки последних. Окончательную разбивку iобщ производят после выбора марки двигателя, установления фактической частоты вращения его вала и уточнения iобщ (см. ниже). |
2.2. Энергетический анализ передаточного механизма
Энергетический анализ ПМ включает определение потребной мощности двигателя, подбор типоразмера двигателя и уточнение передаточного отношения. В предложенном примере с i/тр.общ. = 78,12 используем вариант с 3-х ступенчатым цилиндрическим редуктором (рис. 8a), для которого в соответствии с (2) и (3)
 кВт .
кВт .
В этом выражении
ηц =0,98 – кпд одной ступени цилиндрической передачи 7 степени точности с учетом потерь в опорах (табл. 3);
ηмб = ηмт = 0,99 – кпд предварительно назначенных упругой на быстроходном валу и компенсирующей на тихоходном валу муфт
(табл. 3) (в дальнейшем после окончательного выбора и конструирования муфт при необходимости эти значения корректируют).
При выборе типоразмера двигателей целесообразно рассмотреть использованиедвигателей ближайшей меньшей мощности, к примеру, единой серии 4Амарки 112МА6 с Рд = 3 кВт и пд = 955 мин-1 и ближайшей большой мощности марки 112МВ6 с Рд = 4,0 кВт и пд = 950 мин-1. Первый из них имеет перегрузку
 ,
,
что лежит в пределах допустимых значений [ΔPпер] = 3 ÷ 5 %. Так как во втором варианте двигатель имеет существенную недогрузку (ΔPнед ≈ 23%) можно отдать предпочтение первому варианту.
Уточненное требуемое передаточное отношение при выбранном двигателе составит
После уточнения этого параметра следует произвести разбивку iтр.общ между ступенями ПМ.
3. Разбивка передаточного отношения между ступенями приводного механизма
Соотношение передаточных отношений отдельных ступеней является достаточно действенной переменной проектирования в руках конструктора. С помощью разбивки iобщ можно добиваться, к примеру, решения таких задач как получение минимальной массы механизма, минимальных его размеров по габариту с ограниченной величиной, обеспечения оптимальных условий смазки и т.п. Для некоторых типовых схем ПМ выработаны рекомендации по идеям проведения обсуждаемой операции. Одной из наиболее распространенных идей разбивки является получение механизма с минимальной массой зубчатых колес, которая в конечном итоге часто минимизирует и размеры, и массу, и стоимость ПМ в целом. На рис.9 [6] приведены графики для проведения обсуждаемой операции применительно к 2-х и 3-х ступенчатым цилиндрическим редукторам развернутой схемы в случае примерно одинаковых значений допускаемых контактных напряжений [σH] зубчатых колёс всех ступеней при одновременном большем значении коэффициента относительной ширины ψbd в тихоходных ступенях. Принцип использования графика очевиден из рисунка. Так для рассматриваемого примера iтр.общ. = 74,61 можно принять i1 = iБ = 6,5 ; i2 = iПР = 4,4 ; i3 = iТ = 2,4. Следует подчеркнуть при этом, что в выделенном диапазоне i1, i2 и i3 можно варьировать их величинами в диапазоне ±10 % при сохранении iобщ без ощутимого увеличения массы колес [7 с.214].
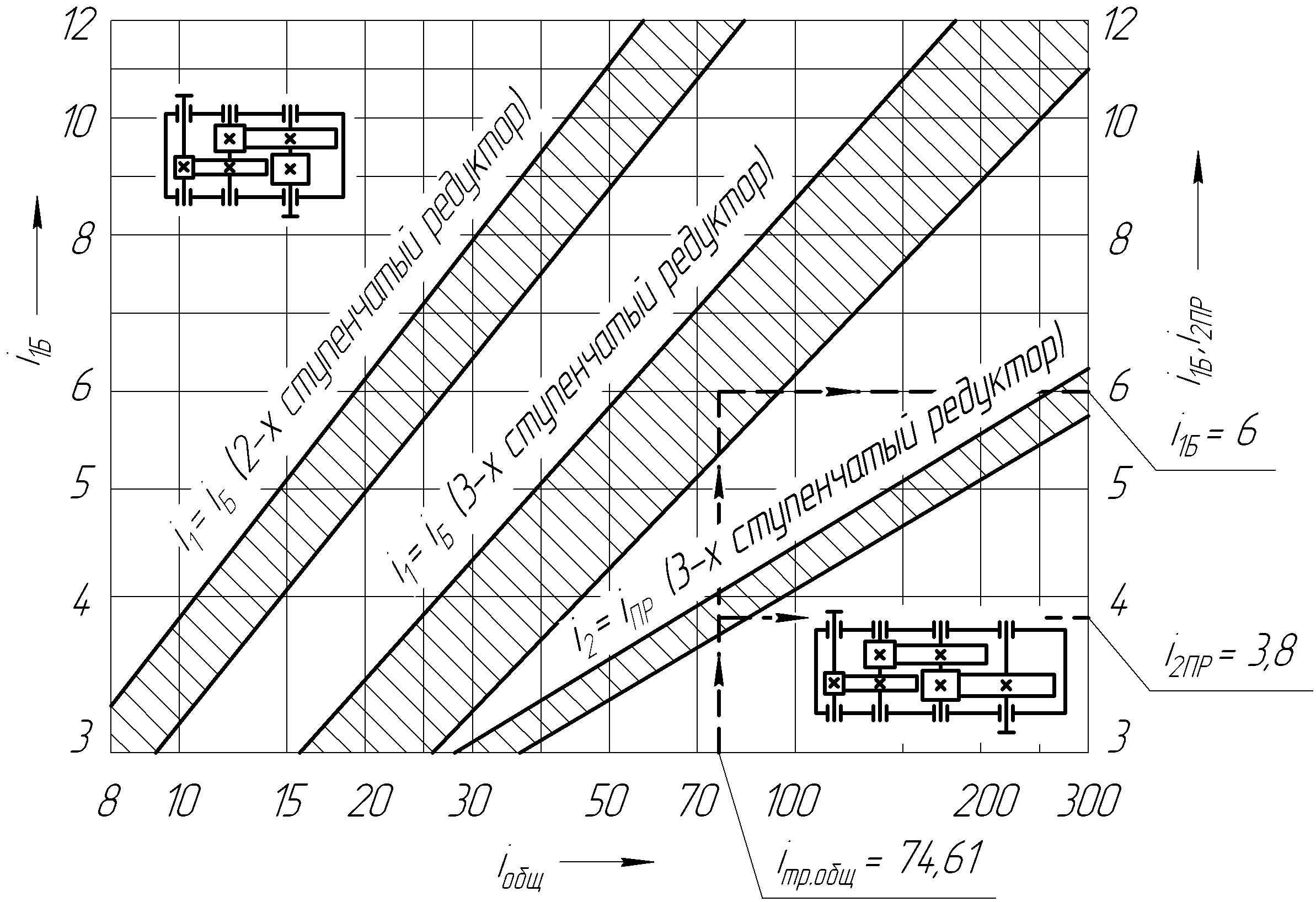
Рис. 9. Разбивка общего передаточного отношения для 2-х и 3-х ступенчатых цилиндрических редукторов развернутой схемы, обеспечивающая близкие диаметры зубчатых колес ступеней [6]
Распределение iобщ в двухступенчатых соосных редукторах можно производить из условия получения их минимальных размеров (рис.10)
[8 рис. 5.11]. Для использования графика необходимо предварительно задаться коэффициентом λ, характеризующим соотношения параметров тихоходной и быстроходной ступеней.
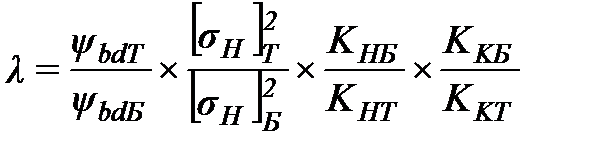 , (4)
, (4)
где ψbdT , ψbdБ - относительная ширина шестерни (b/d) соответственно тихоходной и быстроходной ступеней (рекомендуется назначать ψbdT ≈ (1,2 ÷ l,4)ψbdБ с целью обеспечения равно-нагруженности ступеней);
[σн]Т, [σн]Б - допускаемые контактные напряжения в ступенях (можно назначить [σн]Т ≈ [σн]Б при работе в зоне длительной выносливости с позиции унификации используемых материалов и технологических требований, предъявляемых к ним);
КHТ, КHБ – коэффициенты нагрузки по контактным напряжениям соответствующих ступеней (для ориентировочной оценки можно принять КHТ / КHБ ≈ 1 т.е. КHТ ≈ КHБ);
КH = КHβ ∙ КHV – коэффициент КH определяется произведением коэффициентов неравномерности распределения нагрузки по ширине зуба КHβ и коэффициента динамичности КHV ;
КKТ, КKБ - коэффициенты, учитывающие большую нагрузочную способность косозубых передач по сравнению с прямозубыми (при использовании в обеих ступенях прямозубых или косозубых колес  , при применении в быстроходной ступени косозубых колес, а в тихоходной – прямозубых -
, при применении в быстроходной ступени косозубых колес, а в тихоходной – прямозубых -  ).
).
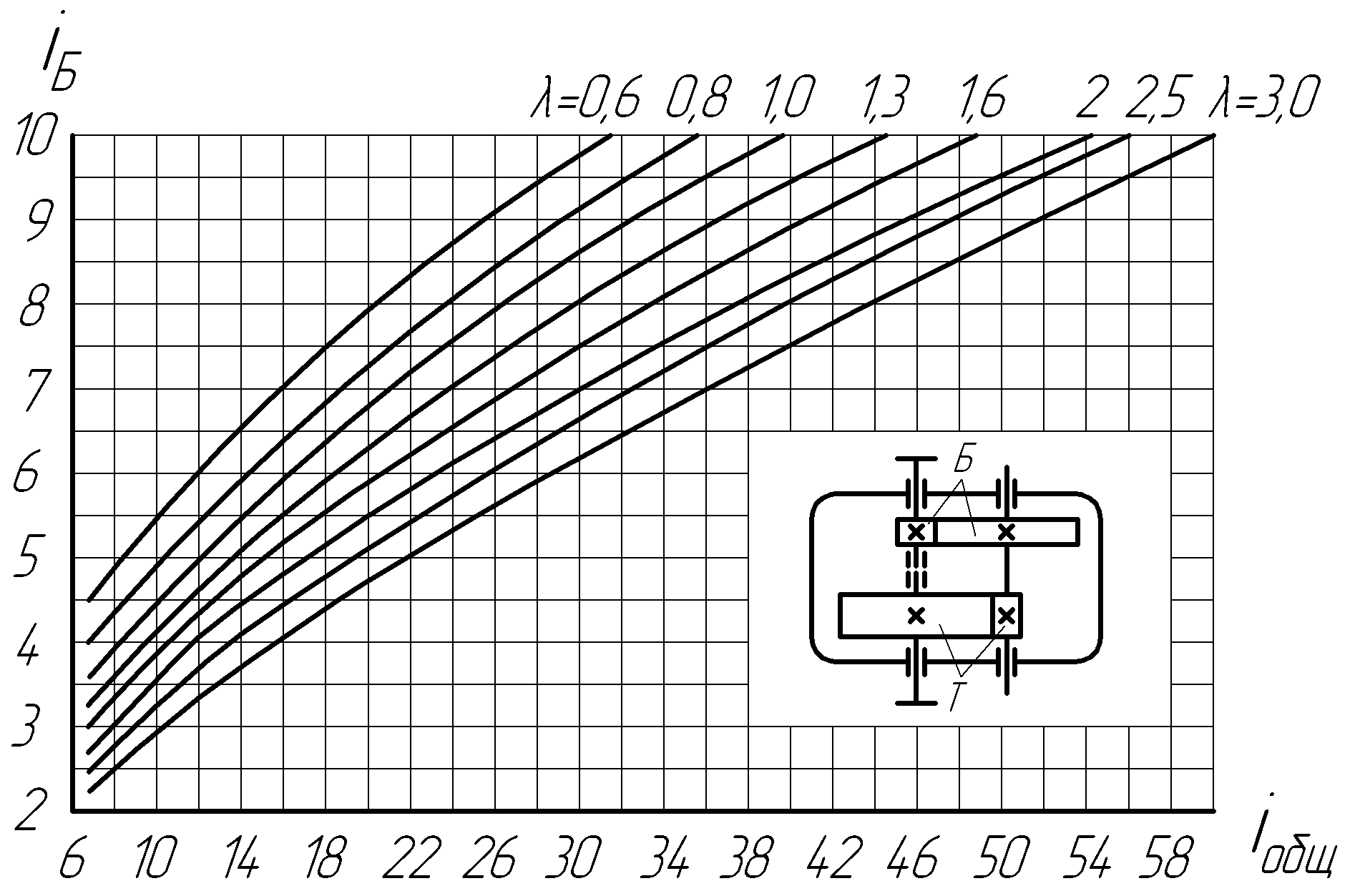
Рис. 10. Разбивка общего передаточного отношения для 2-х ступенчатого цилиндрического соосного редуктора, обеспечивающая его минимальные габариты [8]
Разбивка iобщ по рис. 10 часто приводит к тому, что в соосном редукторе диаметр колеса быстроходной ступени оказывается больше, чем в тихоходной. Для редукторов с расположением осей валов в горизонтальной плоскости данное обстоятельство приводит к большему погружению колеса быстроходной ступени в масляную ванну; увеличению потерь энергии на трение о смазку, интенсивности вспениванияи старения смазки. Для снижения этого отрицательного эффекта с помощью конструктивных приемов увеличивают значение λ.
Одинаковое погружение зубчатых колес соосных редукторов в масляную ванну достигается при равенстве iБ = iТ.В этом случае очевидно, что
 . (5)
. (5)
Однако при подобной разбивке возрастают размеры редуктора.
Разбивку iобщ в коническо-цилиндрических редукторах с целью получения минимальных габаритов можно производить по графикам рис.11 [8 с. 139].
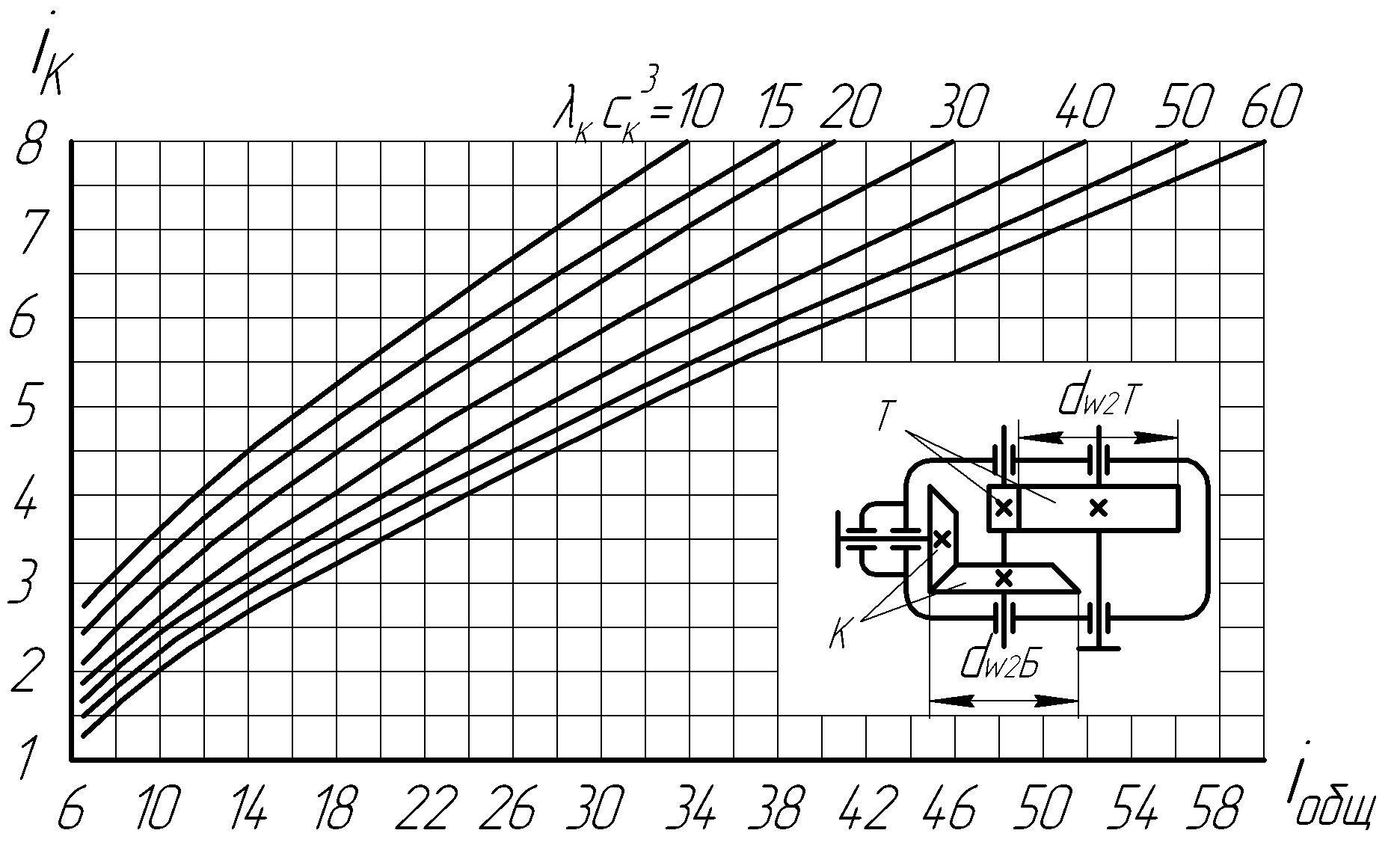
Рис. 11. Разбивка общего передаточного отношения для 2-х ступенчатого коническо-цилиндрического редуктора, обеспечивающая его минимальные габариты [8]
Использование графиков предполагает предварительное назначениевеличины коэффициента λ кон
 . (6)
. (6)
В этой зависимости кроме ранее обозначенных в (4)параметров:
 - коэффициент относительной ширины шестерни тихоходной цилиндрической передачи (в предварительных расчетах при постоянной нагрузке с твердостью рабочих поверхностей зубьев НHB < 350 рекомендуют принимать ψbdT = 1,15 ÷ 1,4 , а при НHB > 350 ψbdT = 0,7 ÷ 0,9), в случае переменной нагрузки на передачу эти значения уменьшают в 1,2 – 1,3 раза; bW – расчетная ширина зубчатых венцов; d1T – диаметр делительной окружности шестерни тихоходной ступени;
- коэффициент относительной ширины шестерни тихоходной цилиндрической передачи (в предварительных расчетах при постоянной нагрузке с твердостью рабочих поверхностей зубьев НHB < 350 рекомендуют принимать ψbdT = 1,15 ÷ 1,4 , а при НHB > 350 ψbdT = 0,7 ÷ 0,9), в случае переменной нагрузки на передачу эти значения уменьшают в 1,2 – 1,3 раза; bW – расчетная ширина зубчатых венцов; d1T – диаметр делительной окружности шестерни тихоходной ступени;
 - относительная ширина зубчатого венца конической передачи (в наиболее распространенных конических передачах с круговым зубом при угле спирали β = 35° принимают ψL = 0,3); b – ширина зубчатого венца; Re – внешнее конусное расстояние;
- относительная ширина зубчатого венца конической передачи (в наиболее распространенных конических передачах с круговым зубом при угле спирали β = 35° принимают ψL = 0,3); b – ширина зубчатого венца; Re – внешнее конусное расстояние;
 - соотношения диаметров делительных окружностей колес тихоходной и быстроходной ступеней (для получения минимальных размеров редукторов рекомендуют принимать СК = 1,0 ÷ 1,1).
- соотношения диаметров делительных окружностей колес тихоходной и быстроходной ступеней (для получения минимальных размеров редукторов рекомендуют принимать СК = 1,0 ÷ 1,1).
Как в случае расчетов по формуле (4) и тем же соображениям рекомендуется принять  . Дальнейшие действия по установлению iK и iЦ после вычисления λ кон очевиден из рисунка.
. Дальнейшие действия по установлению iK и iЦ после вычисления λ кон очевиден из рисунка.
В механизмах с использованием передач гибкой связью (цепных, ременных) при проведении разбивки iобщ учитывают их более низкую нагрузочную способность по сравнению с зубчатыми передачами и принимают меры для уменьшения размеров ведомой звёздочки и шкива. С этой целью кинематически разгружают механизмы гибкой связи, снижая на 30 ÷ 40 % их передаточные отношения по сравнению с зубчатыми. При подобных ситуациях для цилиндрической зубчатой передачи в двухступенчатых схемах можно принять  , тогда для цепной (ременной)
, тогда для цепной (ременной)  . В трехступенчатых механизмах с применением обсуждаемых передач
. В трехступенчатых механизмах с применением обсуждаемых передач  можно назначить примерно равным передаточному отношению третьей ступени по рис.9. Уменьшенное передаточное отношение передач гибкой связью позволит уменьшить размеры ведомых звездочек и шкивов и избежать диссонанса в их размерах по сравнению с размерами других элементов ПМ.
можно назначить примерно равным передаточному отношению третьей ступени по рис.9. Уменьшенное передаточное отношение передач гибкой связью позволит уменьшить размеры ведомых звездочек и шкивов и избежать диссонанса в их размерах по сравнению с размерами других элементов ПМ.
4. Кинематический и силовой расчеты ПМ, анализ результатов расчетов в бригаде
Задача кинематических расчетов заключается в определении частот вращения всех валов передаточного механизма и направлений их вращения. Очевидно, что частота вращения первичного быстроходного вала или другого элемента (шкива ременной передачи, например) n1 будет равна частоте вращения вала двигателя, а частоты последующих валов изменяются в передаточное отношение соответствующей ступени.
К примеру, в трехступенчатом механизме
 (7)
(7)
где  - уточненные передаточные отношения соответственно первой, второй и третьей ступеней передаточного механизма.
- уточненные передаточные отношения соответственно первой, второй и третьей ступеней передаточного механизма.
Направления вращения валов определяются необходимым направлением вращения приводного вала рабочего органа, который направляют таким образом, чтобы он натягивал тяговый орган транспортирующего элемента (ленты, цепного полотна). После решения задачи о направлении вращения приводного вала устанавливают направления вращения всех других валов передаточного механизма в соответствии с использованным типом передач и наносят их на его кинематическую схему (см. рис8а).
Задача силового расчета заключается в установлении крутящих моментов на валах передаточного механизма. Значение крутящего момента может вычисляться по потребной или по фактической мощности выбранного двигателя. В курсовых проектах следует вести расчет по требуемой мощности, дабы не создавать недогруженный механизм. При известных частоте вращения n и требуемой мощности P значение крутящего момента T может быть вычислено по известной зависимости
 (8)
(8)
где мощность имеет размерность [кВт], а частота вращения  –
–  [мин-1]. Определение моментов можно начать как с рабочего органа, подставляя Рр.о. и n р.о., так и с двигателя с подстановкой Рд и n д. При вычислении значений крутящих моментов T используют очевидные зависимости
[мин-1]. Определение моментов можно начать как с рабочего органа, подставляя Рр.о. и n р.о., так и с двигателя с подстановкой Рд и n д. При вычислении значений крутящих моментов T используют очевидные зависимости
 (9)
(9)
или
 (10)
(10)
В уравнения (9) и (10) следует подставлять значения кпд передач с учетом потерь в опорах.
На заключительном этапе вычисления частот вращения и крутящих моментов следует провести сравнительный анализ полученных в бригаде значений. По результатам сравнения следует сформулировать причины совпадения и различий полученных значений кинематических и силовых параметров.
5. Порядок выполнения лабораторного занятия
1. Знакомятся по методическим указаниям с содержанием этапа синтеза и анализа (формирования технической концепции) передаточного механизма.
2. По исходным данным курсового проекта в рамках бригады определяют предварительное значение требуемого передаточного отношения механизма и предлагают возможные его варианты исполнения, которые способны реализовать  . По каждому из вариантов составляют конструктивно кинематические схемы. Количество предложенных вариантов должно быть не менее, чем число студентов в бригаде.
. По каждому из вариантов составляют конструктивно кинематические схемы. Количество предложенных вариантов должно быть не менее, чем число студентов в бригаде.
3. Проводят сравнительный анализ предложенных вариантов по их ориентировочным качественным параметрам и выбирают схему для индивидуальной проработки в курсовом проекте. Выбранная схема подписывается преподавателем и в дальнейшем служит заданием для КП.
4. Проводят энергетический расчет выбранной схемы ПМ, подбирают марку двигателя, устанавливают номинальную (асинхронную) частоту вращения вала двигателя и уточняют передаточное отношение. Выполняют разбивку уточненного передаточного отношения между ступенями механизма по соответствующим рекомендациям, формулируя идею этой операции.
5. Проводят индивидуальные кинематический и силовой расчеты ПМ по заданным схемам и составляют сводную таблицу «Частоты вращения и крутящие моменты кинематической цепи». Проводят сравнительный анализ кинематических и силовых параметров в бригаде.
Таблица 0.1. Частоты вращения и крутящие моменты кинематической цепи
| Наименование вала | n, об/мин | Т, Н∙м | Тпик, Н∙м |
| Быстроходный | n1 =  = =
| T1 = | T1 ∙ φ = |
| Первый промежуточный | n2 = | T2 = | T2 ∙ φ = |
| Второй промежуточный | n3 =  = =
| T3 = | T3 ∙ φ = |
| Тихоходный | n4 = =
| T4 = | T4 ∙ φ = |
6. Контроль качества подготовки к лабораторному занятию и этапу синтеза технической концепции ТО, заданного в КП
На основе самоподготовки, проведения лабораторного занятия и выполнения соответствующего этапа КП студент должен
Знать (знание вопросов 1,2 контролируется при допуске к выполнению лабораторного занятия по результатам самоподготовки)
1. Исходные данные стадии структурного синтеза передаточного механизма (привода) машин общемашиностроительного применения.
2. Основные функции передаточного механизма и установление первичного параметра для разработки структуры приводного механизма.
3. Типовые передаточные механизмы для реализации требуемого передаточного отношения.
4. Порядок выполнения этапа структурного синтеза. Переменные проектирования этапа.
5. Предварительный выбор типа и типоразмера электродвигателя. Уточнение передаточного отношения механизма.
6. Методы разбивки общего передаточного отношения между ступенями ПМ.
7. Методы определения кинематических и силовых параметров по всей структуре механизма.
Владеть
1. Методом функционального анализа приводов простейших машин общемашиностроительного назначения.
2. Методом структурного синтеза передаточного механизма для реализации планируемых функций.
3. Методами энергетического, кинематического и силового анализов передаточных механизмов.
Приложение
Задания на курсовое проектирование по дисциплинам “Основы проектирования”, “Детали машин и основы конструирования”, “Детали машин” для студентов механических специальностей
Типовые задания
| ТЕМА №1. Разработать приводную станцию ленточного конвейера для перемещения сыпучих грузов [9÷11] | ||||||||
| ИСХОДНЫЕ ПАРАМЕТРЫ | ВАРИАНТЫ | |||||||
| 1. Требуемая мощность на приводном валу Ртр.р.о, кВт | 2,2 | 3,2 | 3,7 | 4,8 | 4,0 | 2.0 | 1,4 | 1,0 |
| 2. Частота вращения приводного вала nр.о, об/мин | ||||||||
| 3. Параметры приводного барабана: диаметр Dб, мм ширина Bб, мм | ||||||||
| 4. Календарный срок службы tкал | 5 лет | |||||||
| 5. Коэффициенты использования механизма в течение: года — Kг, суток — Kс | Kг =0,8 ; Kс=0,33 | |||||||
| 6Циклограмма нагружения | а — нагрузка постоянная б — нагрузка переменная | |||||||
Дата добавления: 2016-10-26; просмотров: 2032;
Поиск по сайту
Узнать еще
- II.1.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.2.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.3.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.4.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.5.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.6.2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- II.7. 2 ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
- III и IV нейроны слухового пути. Третьи и четвертые нейроны слухового проводящего пути. Ядра слухового анализатора. Признаки поражения слухового пути.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
