Методы решения задач оптимизации в АСУ
Математическое обеспечение позволяет использовать методы автоматизированного поиска оптимальных вариантов при проектировании системы.
Часто при решении задач оптимизации одновременно используются несколько критериев (многокритериальность). Оптимизация параметров за счет выделения одной из критериальных функций в ранг целевой не всегда приносит желаемые результаты. В этом случае можно использовать либо процедурную декомпозицию, либо последовательно совершенствовать проектируемую АСУ, сменяя критериальные ограничения. Неоднородность и высокая размерность пространства поиска также вызывают необходимость декомпозиционного подхода к проектированию АСУ. К указанным факторам, как правило, добавляется дискретность переменных и нелинейность целевой функции. Количество переменных достигает порядка нескольких тысяч, что исключает возможность использования полного перебора. Неприемлем также подход, заключающийся в решении соответствующей непрерывной задачи с последующим округлением нецелоисчисленных компонент до ближайших целых значений.
В качестве решения может быть использован метод замены целевой функции с ее кусочно-линейной аппросимакцией и последующее решение задачи методом отсекающих плоскостей Гомори. Однако возможности использования алгоритмов Гомори ограничиваются тем, что формирование правильного отсечения сопряжено с определенными трудностями и быстрым ростом размерности задачи за счет новых ограничений. Кроме того, полученное решение представляет собой лишь аппроксимацию оптимального решения.
Использование методов, основанных на идее метода «ветвей и границ», требует построения правил ветвления и вычисления оценок получаемых множеств, которые сильно зависят от особенностей рассматриваемой задачи. Хотя эти методы весьма эффективны в вычислительном отношении, не во всех случаях удается получить эффективные правила ветвления и вычисления оценок.
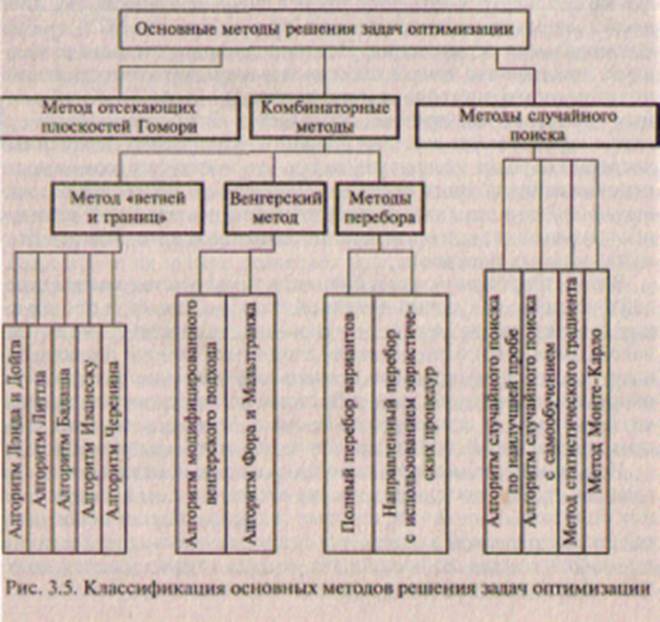
Наибольшее распространение при решении задач с большим числом переменных получили приближенные методы и, в первую очередь, методы направленного поиска с использованием декомпозиции и разнообразных эвристических приемов. Вместе с тем можно считать целесообразным поиск новых эвристических процедур, существенно сокращающих число возможных вариантов перебора и упрощающих процесс оценки получаемых вариантов. Очевидно, что такие процедуры должны основываться на физическом смысле задачи и ее особенностях (рис. 3.5).
Большая размерность и высокая сложность задач, решаемых на этапе системного программирования, дискретность переменных, не разработанность соответствующих математических моделей и методов, а также сложность получения выражения целевой функции определяют необходимость разработки новых методов и алгоритмов.
Анализ показывает, что единственно возможным в данном случае является декомпозиционный подход к решению задач этапа системного проектирования. Основная идея декомпозиционного подхода состоит в последовательной оптимизации по одному из управляемых параметров при ограничениях на остальные управляемые параметры. Использование декомпозиционного подхода к проектированию АСУ позволяет существенно упростить задачу проектировщиков. При таком подходе задачи проектирования подсети связи и полсети вычислительных ресурсов и пользователей решаются в соответствии с принципом покомпонентного спуска, обеспечивающим поочередное решение частных задач и установления связи между ними. При этом полученное решение является субоптимальным. Сложность получения точного решения определяется, с одной стороны, недостаточностью задания исходных данных и, с другой стороны, следует из того факта, что для решения общей задачи проектирования используется се декомпозиция па подзадачи. При этом оптимизация каждой подзадачи Si, i = 1,…, I из множества всех подзадач приводит к субоптимальным решениям задачи S*, составленной из всех этих подзадач.
Если при решении частных задач принципиально возможно использование универсальных математических методов, то разработка процедур координации необходима при проектировании каждой конкретной системы. Именно поэтому вопросы координации решений, получаемых при проектировании каждой из подсистем АСУ, наиболее сложны и в настоящее время проработаны недостаточно полно.
Попытка синтеза АСУ сразу по всем параметрам с учетом всех ограничителей нереальна как по объему информации, так и по трудоемкости вычислительных работ. Методология синтеза АСУ представляет собой разбиение общих задач проектирования па ряд взаимосвязанных подзадач, установление информационного обмена и последовательности их выполнения.
Основная трудность заключается в нахождении компромисса между простотой описания и необходимостью учета многочисленных характеристик АСУ. Решение этой проблемы заключается в иерархическом описании, при котором система представляется семейством моделей, каждая из которых описывает поведение системы на различных уровнях абстракции. Для эффективности такого описания системы необходима наибольшая независимость моделей для различных уровней. Рассмотренные выше обстоятельства приводят к схеме структурно-процедурной вложенности задач проектирования АСУ (рис. 3.6).
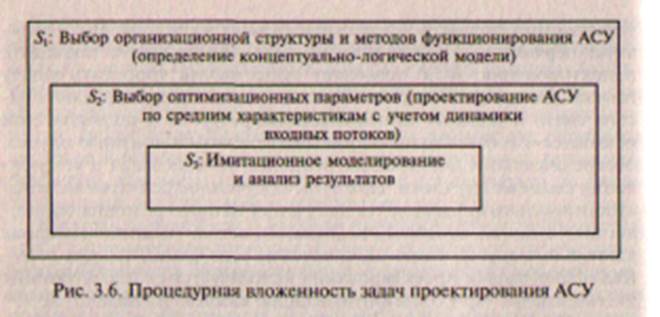
В задаче верхнего уровня 5, при заданных требованиях к функционированию следует определить общие принципы построения АСУ, которые в дальнейшем позволяют сформулировать математическую модель АСУ. В задаче второго уровня в условиях известных входных воздействий и общих принципов функционирования требуется синтезировать оптимальные параметры АСУ. В задаче третьего уровня требуется проанализировать выбранные параметры АСУ на соответствие заданным критериям, используя метод имитационного моделирования.
Понятие вложенности процессов проектирования в данном случае отражает строгую последовательность решения задач и степень конкретизации принимаемых решений.
После подобной неформальной декомпозиции проблема декомпозиции не снимается, а подчиняется новым требованиям обеспечения автоматизированного поиска решений с использованием формальных процедур.
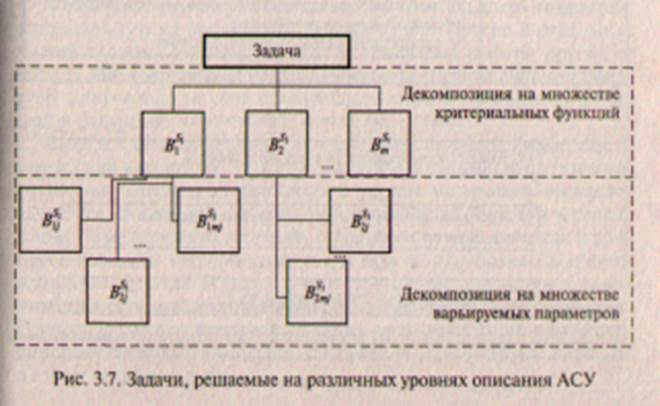
Рассмотрим более подробно задачу S1. Наличие нескольких критериев, которые в данном случае невозможно свести к одному функциональному критерию, и неоднородность пространства варьируемых параметров обусловливают дальнейшую декомпозицию, реализуемую на принципах однородности критериальных функций и пространства поиска. Над задачей S1, проводится формальная декомпозиция на
Bр, р = 1,…, mблоков, в функции каждого из которых входит расчет одной из критериальных функций.
Например, блок B1 решает задачу обеспечения классической устойчивости и адаптируемости, блок В2 — задачу обеспечения структурной устойчивости и надежности. Целевая функция всегда выносится в отдельный блок. Часто это — экономические требования. При этом все блоки задачи 5, имеют одно и то же пространство варьируемых параметров Rх. Здесь нет вложенности процедур проектирования, так как последовательность решения задач в блоках не является существенной. Информационный обмен типа «связь по варьируемым параметрам» для блоков Bрпорождает дополнительные обратные связи по управлению, что приводит к необходимости многократного синтеза блоков.
Далее над каждым блоком ВрS1 возможно провести декомпозицию на блоки ВрqS1, q = 1,…, qm, локальные по множеству варьируемых параметров. При этом возникает задача координации полученных блоков. Таким образом, синтез каждого блока является многошаговым процессом (рис. 3.7).
Рассмотрим задачу выбора оптимальных параметров АСУ — задачу S2. Особенность данной задачи заключается в том, что ее решение находится на двух уровнях. Это представляет дальнейшую декомпозицию задачи S2на две вложенные подзадачи S21 и S22, решаемые на различных уровнях описания АСУ. Подзадача S21 является задачей проектирования АСУ по средним характеристикам, а по палача S22 является задачей проектирования АСУ с учетом динамики выходных информационных потоков и внутренних параметров.
Многозначность решений определяет использование метода, заключающегося в поиске решений при различных начальных условиях. Задача проектирования АСУ с учетом динамических характеристик системы в свою очередь также декомпозируется на задачи. Решение указанного множества задач в соответствии с их вложенностью и с обязательным учетом внешних обратных связей позволяет на макроуровне получить рациональный вариант проектируемой системы. Необходимость координации решений частных задач и организации итерационных процедур диктует необходимость рассмотрения вопросов организации управления системным анализом. Объектами управления при системном проектировании являются процедуры первого и второго уровней декомпозиции задач S1 и S2.
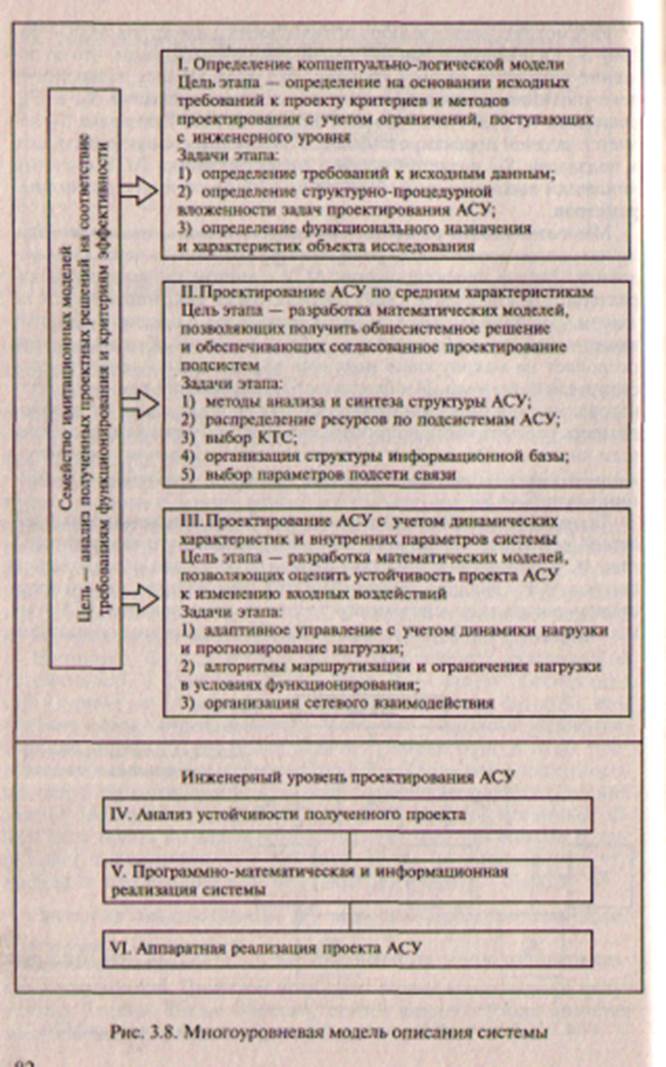
Таким образом, более детальная разработка изложенных направлений исследования методов автоматизированного проектирования АСУ позволит вплотную подойти к решению общей задачи синтеза АСУ. Обобщая результаты настоящего раздела, можно представить состав задач системного уровня проектирования АСУ и их взаимосвязь (рис. 3.8). Все задачи S1, S2, S3 охвачены обратными связями, обеспечивающими координацию результатов их решений и итерационность процесса проектирования.
Необходимость создания средств автоматизации проектирования таких больших систем, как АСУ, обусловливает интерес проектировщиков к созданию достаточно универсальных и высокопроизводительных методов решения подзадач, указанных на рис. 3.8.
Дата добавления: 2021-01-26; просмотров: 570;
Поиск по сайту
Узнать еще
- I. Гидрометаллургические методы
- I. Задачи Единой всероссийской спортивной классификации
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.
- II. Цели и задачи службы .
- II. Цель, задачи, приоритеты Стратегии
- II.II. Репродуктивные методы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
