Методика работы и описание установки
Установка состоит из двух шаров А и B на бифилярных подвесах, укрепленных на кронштейне F (рисунок 4.1)
Длину нитей можно изменять с помощью винтов и тем самым осуществлять центровку шаров. Установка снабжена шкалой S для измерения углов отклонения шаров и магнитами М1 и М2, при помощи которых шары удерживаются в отклоненном положении.
Если шар отклонить от положения равновесия, он приобретет скорость V. Ее можно найти, использовав закон сохранения энергии.
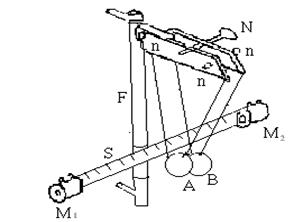
Рисунок 4.1
В отклоненном положении (рисунок 4.2) шар обладает запасом потенциальной энергии Wп = mgh.
Рисунок 4.2
Высоту h можно определить из треугольника ОАС:
ОС = l – h = l cosa,
откуда
h = l(1 – cos a) = 2lsin2  . (4.16)
. (4.16)
При прохождении положения равновесия шар обладает кинетической энергией
 , (4.17)
, (4.17)
где I – момент инерции шара,
w – его угловая скорость в момент прохождения положения равновесия.
Если радиус шара R значительно меньше длины нити l, то шар можно считать материальной точкой, момент инерции которой равен I = ml2, а угловая скорость  .
.
Подставив I и w в формулу кинетической энергии, получим:
 . (4.19)
. (4.19)
По закону сохранения энергии:
 , (4.20)
, (4.20)
откуда
 . (4.21)
. (4.21)
Подставив в (4.21) h (4.16), получим:
 . (4.22)
. (4.22)
Для определения отношения масс шаров воспользуемся законом сохранения импульса, если один из шаров неподвижен (например, второй шар):
m1V1 = m1U1_+ m2U2, (4.23)
где m1V1 – импульс первого шара до удара,
m1U1 – импульс первого шара после удара,
m2U2 – импульс второго шара после удара.
Из формулы (4.23) имеем:
 (4.24)
(4.24)
или, учитывая соотношение (4.22), получим:
 , (4.25)
, (4.25)
где aо – угол отклонения первого шара до удара,
a1 – угол отклонения первого шара после удара,
j – угол отклонения второго шара после удара.
При определении коэффициента восстановления шаров их отклоняют перед ударом на одинаковый угол aо. Если шары имеют равные массы, то скорости до и после удара будут равными, т.е.
V1 = V2 =V и U1 = U2 = U.
Поэтому для коэффициента восстановления шаров будет иметь:
 . (4.26)
. (4.26)
Откуда: U = КV.
Следовательно, можно записать систему уравнений:
После первого удара: U1 = КV.
После второго удара: U2 = КU1.
и.т.д.
После n- го удара: Un = КUn-1.
Перемножив равенства и произведя сокращения, получим:
 , (4.27)
, (4.27)
где V – скорость любого из шаров до удара,
Un – скорость этого же шара после n –го удара.
Подставив в (4.27) V и Un с учетом (4.22), получим:
 , (4.28)
, (4.28)
где aо – угол отклонения шара до удара,
an – угол отклонения шара после n –го удара.
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ ПРИ ПОМОЩИ МАЯТНИКА
Гармоническим колебанием физической величины a называется процесс изменения ее за время t по закону гармонической функции, например:
a = Asin(w t + jo), (5.1)
где А – амплитуда колебаний – максимальное значение колеблющейся величины,
w – циклическая частота колебания, величина j = w t + jo носит название фазы колебания,
jo – начальная фаза колебаний.
(jo = const). График такого колебания представлен на рисунке 5.1.
Периодом колебания называется промежуток времени, за который совершается одно полное колебание. При этом фаза колебания изменится на 2p, т.е. w (t + T) + jo = w t + jo + 2p,
откуда
w =  . (5.2)
. (5.2)
Рисунок 5.1
Величина w – круговая (циклическая) частота колебания, характеризует изменение фазы колебания за единицу времени.
Если начальная фаза jo равна  , то уравнение гармонического колебания записывается в виде:
, то уравнение гармонического колебания записывается в виде:
a = Acosw t. (5.3)
Примерами гармонических колебаний являются колебания физического и математического маятников.
Физическим маятником называется тело, укрепленное на неподвижной горизонтальной оси, не проходящей через его центр тяжести, и способное совершать колебания относительно этой оси (рисунок 5.2).
Рисунок 5.2
Математический маятник – это идеализированная система, состоящая из материальной точки m, подвешенной на нерастяжимой невесомой нити и колеблющейся под действием силы тяжести. Хорошим приближением математического маятника является тяжелый шарик, подвешенный на тонкой длинной нити (диаметр шарика во много раз меньше длины нити, масса которой во много раз меньше массы шарика), второй конец которой закреплен неподвижно.
 Рисунок 5.3 Рисунок 5.3
|  Рисунок 5.4 Рисунок 5.4
|
Если груз маятника неподвижен и находится в положении равновесия (рисунок 5.3), на него действуют сила тяжести  =
=  и сила натяжения
и сила натяжения  . Эти силы уравновешивают друг друга (направлены в противоположные стороны = – ).
. Эти силы уравновешивают друг друга (направлены в противоположные стороны = – ).
Докажем, что маятник, отклоненный на малый угол a от положения равновесия, будет совершать гармонические колебания. При отклонении маятника на угол a от положения равновесия силу тяжести  = можно разложить на две составляющие (рисунок 5.4)
= можно разложить на две составляющие (рисунок 5.4)
ê  ê =
ê =  sina и ê
sina и ê  ê = cosa. (5.4)
ê = cosa. (5.4)
Сила уравновешивает силу натяжения Составляющая P1 направлена вдоль касательной к траектории движения маятника (движение по дуге окружности АС к положению равновесия с ускорением).
В положении равновесия (×) С ê ê = 0, шарик по инерции проходит это положение, а затем его движение становится замедленным до положения (×) B. После максимального отклонения от положения равновесия на угол a шарик будет двигаться обратно и такие движения будут повторяться многократно – шарик будет колебаться.
На основании закона динамики вращательного движения – момент силы lP1 равен произведению момента инерции шарика I на угловое ускорение e, имеем:
P1 l = Ie , (5.5)
где e = a11 = d2a/dt2 – угловое ускорение (вторая производная угла поворота a по времени t),
I =ml2 – момент инерции шарика, относительно оси, проходящей через точку 0 (момент инерции материальной точки),
l – длина маятника,
P1 = – Psina = – mgsina – возвращающая сила (знак “–” обусловлен тем, что P1 и a всегда противоположны).
sina » a при a £ 40 – 60. Поэтому
P1 = – mga (5.6)
и уравнение (5.5) принимает вид:
– mgla = ml2a11,
ga + la11 = 0 (5.7)
или
a11 +  a = 0. (5.8)
a = 0. (5.8)
Обозначив
= w02, w0 =  , (5.9)
, (5.9)
получим уравнение:
a11 + w0 2 = 0, (5.10)
где wо – циклическая частота колебаний маятника.
Уравнение (5.10) – уравнение гармонического осциллятора. Решение этого уравнения имеет вид уравнения гармонического колебания
a = aо cos (wо t + jо). (5.11)
Из соотношения (5.11) следует, что при малых углах отклонения математический маятник совершает гармонические колебания с циклической частотой wо и периодом колебания Т.
Т =  = 2p
= 2p  . (5.12)
. (5.12)
Формулу (5.12) периода колебаний математического маятника можно использовать для определения ускорения свободного падения. Из формулы (5.12) следует, что период колебаний математического маятника не зависит от его массы.
Дата добавления: 2021-01-11; просмотров: 357;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
