ИСПЫТАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ
В трансформаторах под коэффициентом трансформации понимается отношение витков одной фазы обмотки высшего напряжения к числу витков фазы обмотки низшего напряжения, поэтому в них коэффициент трансформации всегда больше единицы. Но в АД с фазным ротором соотношение числа витков обмоток статора и ротора или их номинальных фазных напряжений может быть различным. Коэффициент трансформации всегда определяется от обмотки статора к обмотке ротора и может быть как больше, так и меньше единицы.
Для опытного определения коэффициента трансформации к обмотке статора при разомкнутой обмотке ротора подводиться напряжение и производится измерение линейных напряжений обеих обмоток. Для двигателей с номинальным напряжением до 660 В включительно к обмотке статора следует подводить номинальное напряжение, а для двигателей с номинальным напряжением выше 660 В допускается и пониженное напряжение.
Правильнее было бы измерять фазные напряжения, но нейтральная точка обмотки ротора обычно недоступна, а в обмотке статора доступна не всегда, поэтому приходится измерять линейные напряжения обеих обмоток, а затем пересчитывать и находить фазные:

где Uф1 – фазное напряжение статора, Uф2 – фазное напряжение ротора.
Опыт холостого хода. В отличии от машин возбуждаемых постоянным током, в АД не может быть в чистом виде определена зависимость между током, намагничивающим машину, и индуктируемой ЭДС, потому что ее нельзя получить в режиме генератора, когда намагничивание создается посторонним источником, а все потери покрываются механическим путем – приводным двигателем.
Как и опыт холостого хода для машин других видов, проводимый в режиме двигателя, опыт ХХ АД следует начинать с наибольшего приложенного напряжения, не менее чем с равного 110% от номинального, понижая напряжение. Правильность результатов опыта холостого хода зависит от качества напряжения, приложенного к обмотке статора. Необходимо соблюдать эти три требования: симметричность линейных напряжений, чистоту формы кривой напряжения, устойчивость частоты.
Измерение подводимой мощности при холостом ходе происходит при очень низких коэффициентах мощности и поэтому не отличается точностью. Средством контроля правильности измерений служит сравнение значений коэффициента мощности, полученных как отношение активной мощности, измеренной ваттметрами, к полной, вычисленной по показаниям вольтметров и амперметров, со значениями, полученными по соотношению показаний ваттметров. Чем лучше совпадают эти значения на протяжении всех отсчетов опыта, тем более надежными можно их считать.
За подводимую мощность или потери холостого хода Р0 принимается измеряемая мощность Р, полученная как алгебраическая сумма показаний ваттметров.
Коэффициент мощности определяется по формуле
где Р – подводимая, измеренная мощность; U0 – линейное напряжение; I0 – линейный ток холостого хода.
Если измерение мощности производится способом двух ваттметров, то вычисленное значение проверяется по соотношению их показаний.
Потери в обмотке статора от тока холостого хода вычисляются при сопряжении фаз в звезду по формуле  , а при сопряжении фаз в треугольник
, а при сопряжении фаз в треугольник  , где RJ – сопротивление одной фазы при температуре опыта J, измеренное непосредственно по его окончании.
, где RJ – сопротивление одной фазы при температуре опыта J, измеренное непосредственно по его окончании.
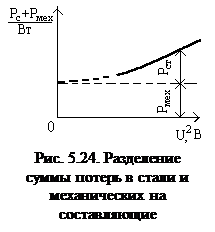 Сумма потерь в стали Рст и механических потерь Рмех получается вычитанием потерь в обмотке статора из подводимой мощности Р. Определение механических потерь, если оно требуется, производится также, как и для двигателей других видов, экстраполяции зависимости этой суммы от квадрата напряжения на нулевое значение последнего (рис. 5.24).
Сумма потерь в стали Рст и механических потерь Рмех получается вычитанием потерь в обмотке статора из подводимой мощности Р. Определение механических потерь, если оно требуется, производится также, как и для двигателей других видов, экстраполяции зависимости этой суммы от квадрата напряжения на нулевое значение последнего (рис. 5.24).
Если предъявляется требование выделения намагничивающей составляющей Im из тока ХХ I0, то оно производится по формуле

Значения sinj0 могут быть получены либо вычислением по измеренным данным, либо по показаниям третьего ваттметра при измерении мощности методом двух ваттметров, учитывающего реактивную мощность.
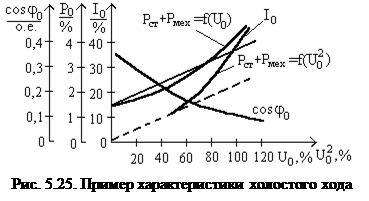
На рис. 5.25 показаны результаты опыта холостого хода.
Опыт короткого замыкания. При коротком замыкании АД подразумевается питание обмотки статора при замкнутом накоротко и заторможенном роторе, которое воспроизводит пусковые усилия и позволяет определить пусковой ток и начальный вращающий момент.
 Рекомендуется следующий порядок проведения опыта: включение испытуемого двигателя производится на напряжение источника 15–20 % от номинального, затем напряжение быстро поднимается до требуемого значения. Это позволяет устранить качание стрелок прибора. Немедленно после выполнения отсчета двигатель отключается, производится измерение сопротивления обмотки статора и, если это требуется, двигатель пускается в режиме холостого хода для охлаждения.
Рекомендуется следующий порядок проведения опыта: включение испытуемого двигателя производится на напряжение источника 15–20 % от номинального, затем напряжение быстро поднимается до требуемого значения. Это позволяет устранить качание стрелок прибора. Немедленно после выполнения отсчета двигатель отключается, производится измерение сопротивления обмотки статора и, если это требуется, двигатель пускается в режиме холостого хода для охлаждения.
Вращающий момент АД при КЗ зависит от положения ротора по отношению к статору. Следует придавать ротору положение, соответствующее наименьшему значению момента.
Коэффициент мощности определяется по формуле
где Рк – мощность, потребляемая двигателем при КЗ; UK – линейное напряжение КЗ; IK – линейный ток КЗ.
Потери в обмотке статора Рм1 при соединении в звезду
 ,
,
а при соединении обмоток в треугольник

где RJ – сопротивление одной фазы статора при температуре J в момент отсчета.
Потери в обмотке ротора
 ,
,
где Рм1 – потери в обмотке статора; Рст – потери в стали, взятые из опыта ХХ и в соответствии с напряжением Uк.
 Потери в обмотке ротора пропорциональны развиваемому вращающему моменту, что дает возможность выражать последний в единицах мощности. Для перевода вращающего момента в Н×м следует воспользоваться формулой
Потери в обмотке ротора пропорциональны развиваемому вращающему моменту, что дает возможность выражать последний в единицах мощности. Для перевода вращающего момента в Н×м следует воспользоваться формулой
 ,
,
где nc – синхронная частота вращения.
Коэффициент 0,9 вводят для учета действия высших гармонических.
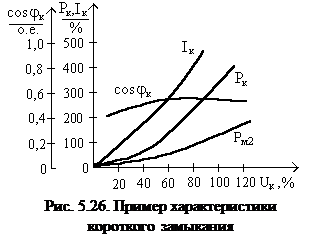
На рис. 5.26 дан пример характеристики КЗ.
Опыт КЗ, произведенный при пониженном напряжении требует для определения тока КЗ при номинальном напряжении введения поправки на насыщение. Эта поправка состоит в том, что выше наибольшего значения при опыте ток КЗ предполагается возрастающим по касательной к кривой, изображающей его зависимость от напряжения (рис. 5.27).
Если эта касательная пересекает ось абцисс в точке DUк, то для определения тока КЗ Iкн при номинальном напряжении Uн, называемого начальным пусковым током следует вос 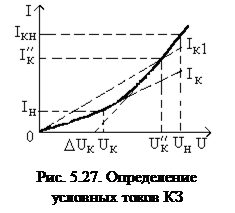 пользоваться формулой
пользоваться формулой
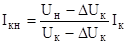 ,
,
где Uк и Iк – наибольшие напряжения и ток в опыте.
Отношение тока КЗ при номинальном напряжении к номинальному току носит название кратности начального пускового тока. Допустимые значения КНПТ должны устанавливаться стандартами и техническими условиями. Cosj при КЗ мало зависит от напряжения. В дальнейшем он немного возрастает из-за повышения активного сопротивления вследствие нагрева обмоток.
Отношение вращающего момента при КЗ с Uн к номинальному моменту носит название кратности начального пускового вращающего момента.
Если в опыте момент Мк определен при токе Iк, то для начального пускового момента Мкн можно написать
 .
.
Определение максимального вращающего момента. Максимальный вращающий момент – один из основных показателей асинхронной машины, т.к. только кратность максимального вращающего момента и превышение температуры частей электродвигателя ограничивают возможности повышения мощности двигателя в данном габарите. Поэтому определять величину максимального вращающего момента следует с достаточно высокой точностью.
Максимальный вращающий момент находят следующими способами:
- определением кривой вращающего момента при пуске;
- непосредственным измерением вращающего момента при нагрузке электродвигателя;
- вычислением вращающего момента по мощности на валу и частоте вращения при нагрузке электродвигателя (при этом мощность на валу находят при помощи тарированной нагрузочной машины или методом отдельных потерь);
- по круговой диаграмме, построенной по результатам опытов КЗ и ХХ.
1. Определение кривой вращающего момента при пуске. Этот способ используется обычно для нахождения максимального момента электродвигателей большой мощности. Для определения кривой вращающего момента испытуемый двигатель пускают вхолостую, а процесс пуска записывается с помощью осциллографа или какого-либо самописца.
 2. Способ определения максимального вращающего момента непосредственным измерением вращающего момента при нагрузке электродвигателя. Этот способ наиболее точен, хотя для машин большой мощности трудно осуществим. В качестве нагрузки используют балансировочную машину или электромагнитный тормоз. Часто в качестве балансировочной машины используют генератор постоянного тока. Если генератор работает с неизменным возбуждением и нагрузочным сопротивлением, то зависимость момента от частоты вращения будет прямолинейной, исходящей из начала координат, с угловым коэффициентом, пропорциональным магнитному потоку Ф (рис. 5.29).
2. Способ определения максимального вращающего момента непосредственным измерением вращающего момента при нагрузке электродвигателя. Этот способ наиболее точен, хотя для машин большой мощности трудно осуществим. В качестве нагрузки используют балансировочную машину или электромагнитный тормоз. Часто в качестве балансировочной машины используют генератор постоянного тока. Если генератор работает с неизменным возбуждением и нагрузочным сопротивлением, то зависимость момента от частоты вращения будет прямолинейной, исходящей из начала координат, с угловым коэффициентом, пропорциональным магнитному потоку Ф (рис. 5.29).
Однако, приходиться снимать всю кривую М = f(n), включая ее неустойчивую часть. В этом случае вид нагрузочных кривых должен быть иным, чтобы обеспечить устойчивые точки пересечения с кривой момента испытуемого двигателя. Этого можно добиться, например, изменяя возбуждение генератора при работе его на общую сеть постоянного тока.
3. Вычисление максимального вращающего момента по мощно сти на валу и частоте вращения при нагрузке электродвигателя. Испытуемый АД механически соединяют с генератором постоянного тока независимого возбуждения, работающим от сети с регулируемым напряжением. При этом предварительно снимают две характеристики машины постоянного тока: ХХ при постоянной частоте вращения в генераторном режиме и зависимость тока ХХ от частоты вращения I0 = f(n) при постоянном значении тока возбуждения (это значение тока возбуждения остается неизменным при определении максимального вращающего момента) в двигательном режиме без испытуемого двигателя.
Для определения искомой кривой зависимости вращающих моментов асинхронного двигателя от частоты вращения при испытании измеряют ток якоря генератора постоянного тока Iя и частоты вращения испытуемого двигателя n, об/мин.
Величину вращающего момента, Н×м находят
 ,
,
где Е0 – ЭДС холостого хода, В.
По полученной кривой М = f(n) определяют максимальный вращающий момент.
4. Определение максимального вращающего момента по круговой диаграмме. Для этой цели строится круговая диаграмма по опытам ХХ и КЗ. Искомые величины находятся графоаналитическим путем.
Дата добавления: 2019-05-21; просмотров: 1047;
Поиск по сайту
Узнать еще
- Аварийные режимы работы электродвигателей
- Аварйные ситуации при работе электродвигателей.
- Авиационных двигателей и воздушных винтов
- Автоматическая ликвидация асинхронных режимов
- Автоматическое отключение насосов при аварийном увеличении температуры подшипников насосов или электродвигателей. Контроль осуществляется с помощью датчиков температуры.
- Анализ и классификация электрических двигателей
- Анализ критериев выбора двигателей мехатронных систем
- Аналитический расчет нагревания тяговых двигателей.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
