Глава 2. Динамическое представление сигналов
Во многих технических задачах, например при вычислении отклика физической системы на известное входное воздействие, требуется специфическая форма представления сигнала. Необходимо не только располагать информацией о мгновенном значении сигнала, но и знать его поведение на всей временной оси.
Способ получения таких моделей сигналов состоит в следующем. Реальный сигнал приближенно представляется суммой некоторых элементарных идеальных сигналов, возникающих в последовательные моменты времени. Если теперь устремить к нулю длительность отдельных элементарных сигналов, то в пределе будет получено точное представление исходного сигнала.
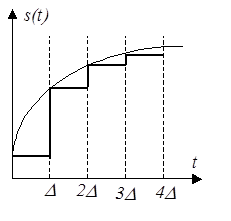
Широкое распространение получили два способа динамического представления. Согласно первому из них в качестве элементарных сигналов используют ступенчатые функции, возникающие через равные промежутки времени  (рис. 3). Высота каждой ступеньки равна приращению сигнала на интервале времени . (рис. 3). Высота каждой ступеньки равна приращению сигнала на интервале времени .
| 
|
| Рис. 3 |
Рассмотрим свойства такого элементарного сигнала. Пусть дан сигнал, математическая модель которого задается системой:
 (1)
(1)
Такая функция описывает процесс перехода некоторого физического объекта из «нулевого» в «единичное» состояние. Переход совершается по линейному закону за время  . Если параметр
. Если параметр  устремить к нулю, то в пределе переход из одного состояния в другое будет совершаться мгновенно. Математическая модель этого предельного сигнала получила название функции включения или функции Хевисайда:
устремить к нулю, то в пределе переход из одного состояния в другое будет совершаться мгновенно. Математическая модель этого предельного сигнала получила название функции включения или функции Хевисайда:
 (2)
(2)
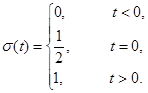
Рассмотрим некоторый сигнал  , причем для определенности положим, что , причем для определенности положим, что  при при  . Пусть . Пусть  – последовательность моментов времени и – последовательность моментов времени и  – отвечающая им последовательность значений сигнала (рис. 4). Как видно из рисунка, текущее значение сигнала при любом – отвечающая им последовательность значений сигнала (рис. 4). Как видно из рисунка, текущее значение сигнала при любом  приближенно равно сумме ступенчатых функций: приближенно равно сумме ступенчатых функций:
| 
|
| Рис. 4 |
 .
.
Если теперь шаг устремить к нулю, то дискретную переменную  можно заменить непрерывной переменной
можно заменить непрерывной переменной  . При этом малые приращения
. При этом малые приращения  превращаются в дифференциалы и получается формула динамического представления произвольного сигнала посредством функций Хевисайда:
превращаются в дифференциалы и получается формула динамического представления произвольного сигнала посредством функций Хевисайда:
 . (3)
. (3)
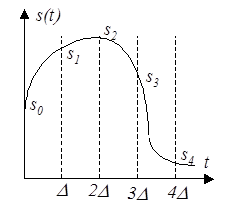
| При использовании второго способа элементарными сигналами служат прямоугольные импульсы. Эти импульсы непосредственно примыкают друг к другу и образуют последовательность, вписанную в кривую (рис. 5). Рассмотрим свойства такого элементарного сигнала. | 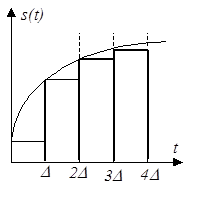
|
| Рис. 5 |
Математическая модель импульсного сигнала прямоугольной формы задается следующим образом:
 (4)
(4)
При любом выборе значения параметра площадь этого импульса равна единице:
 .
.
Пусть теперь величина стремится к нулю. Импульс, сокращаясь по длительности, сохраняет свою площадь, поэтому высота его должна неограниченно возрастать. Предел последовательности таких функций при  носит название дельта–функции или функции Дирака:
носит название дельта–функции или функции Дирака:
 . (5)
. (5)
Возвращаясь к рис. 5, обозначим  – значение сигнала на
– значение сигнала на  –м отсчете. Тогда элементарный импульс с номером представляется следующим образом:
–м отсчете. Тогда элементарный импульс с номером представляется следующим образом:
 . (6)
. (6)
В соответствии с принципом динамического представления исходный сигнал должен рассматриваться как сумма таких элементарных слагаемых:
 . (7)
. (7)
В этой сумме отличным от нуля будет только один член, отвечающий тому номеру , который удовлетворяет неравенству  .
.
Если подставить (6) в (7), предварительно разделив и умножив на величину шага , то
 .
.
Переходя к пределу при  , необходимо заменить суммирование интегрированием по формальной переменной , дифференциал которой
, необходимо заменить суммирование интегрированием по формальной переменной , дифференциал которой  будет отвечать величине .
будет отвечать величине .
Поскольку  , получим искомую формулу динамического представления сигнала с помощью дельта–функции
, получим искомую формулу динамического представления сигнала с помощью дельта–функции
 . (8)
. (8)
Итак, если непрерывную функцию умножить на дельта–функцию и произведение проинтегрировать по времени, то результат будет равен значению непрерывной функции в той точке, где сосредоточен  -импульс.
-импульс.
Дата добавления: 2016-09-06; просмотров: 2679;
Поиск по сайту
Узнать еще
- Автокорреляционная функция сигналов
- Амплитудно-импульсный элемент и его эквивалентное представление.
- Анализ процесса усиления электрических сигналов
- Анализ формы сигналов
- Аналитический сигнал и его свойства. Представление
- Аналитическое представление функций алгебры логики
- Аналого-цифровое преобразование сигналов
- Аналоговые перемножители сигналов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
