Выбор тиристорного преобразователя
Выбор ДПТ НВ
По заданным значениям моментов и времени (приложение 1) и с учетом изменения нагрузки, показанной на диаграмме (приложение 3) построить временную диаграмму моментов для заданного механизма. Определить, какие моменты на данной диаграмме являются неизменяющимися за соответствующие промежутки времени, а какие меняют свое значение. Для внесения заданных элементов в курсовой проект создать таблицу и рисунок, используя данные приложений 1 и 3.
Определить продолжительность включения по формуле 1.1 и по результату указать режим работы.
ПВ=  ; (1.1)
; (1.1)
Определить эквивалентный момент по формуле 1.2.
Мэкв=  Н*м; (1.2)
Н*м; (1.2)
где Mi - момент в определенный промежуток времени,  ;
;
ti - продолжительность данного промежутка времени, сек.;
Σtраб - суммарное время работы двигателя, сек.;
Σtnауз - суммарное время пауз в работе, сек.
 - коэффициент, учитывающий продолжительность включения двигателя.
- коэффициент, учитывающий продолжительность включения двигателя.
Коэффициент нужно выбрать из таблицы 1.1.
Таблица 1.1
| ПВ | |||||
|
| 0,2 | 0,4 | 0,6 | 0,8 |
Найти необходимую эквивалентную мощность в Вт, исходя из значений эквивалентного момента и заданной скорости вращения якоря nзад, по формуле 1.3.
 (1.3)
(1.3)
Искомую номинальную мощность двигателя в кВТ принять, с учётом коэффициентов запаса, равной (формула 1.4):
Pном=(1,1 - 1,3)∙PЭ (1.4)
Определить способ соединения ОЯ и ОВ и отобразить его графически.
По справочнику выбрать электродвигатель постоянного тока и обозначить его основные технические характеристики (тип, номинальную мощность PH, кВт, номинальную скорость вращения nном, об/мин, максимальную скорость вращения nmax, об/мин; сопротивление обмотки якоря Ra, A и обмотки возбуждения Rв, А; номинальный ток двигателя Iном, А; напряжение U,В, КПД, %,). Ссылка на справочник обязательна.
Охарактеризовать выбранный тип электродвигателя.
После выбора двигателя и определения всех его номинальных данных построить естественную механическую характеристику выбранного двигателя (прямая 1 на рис.1.2). Так как она прямолинейна, то для её построения достаточно найти две точки с координатами {Мном; nном} и {Мmin; nmax}, используя формулы 1.5 – 1.8.
 (1.5)
(1.5)
 (1.6)
(1.6)
 (1.7)
(1.7)
 (1.8)
(1.8)
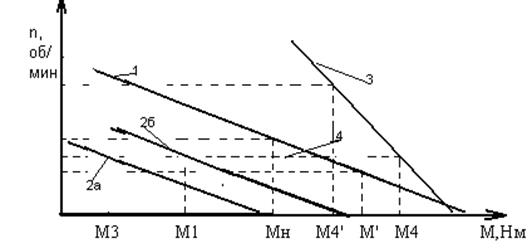
Рис.1.2 Естественная и искусственные механические характеристики ДПТ
Для определения требуемой зонности регулирования, необходимо провести прямую, соответствующую заданной скорости вращения вала двигателя (прямая 4 на рис.1.2), и отметить на ней заданные в условии моменты.
В первой зоне регулирования, характеристики, при изменении напряжения на якоре, сохраняют свою жесткость, следовательно, для построения искусственных характеристик в этом случае достаточно через требуемые точки провести прямые, параллельные естественной (прямые 2а и 2б на рис. 1.2).
Во второй зоне регулирование осуществляется за счет ослабления магнитного потока, создаваемого обмоткой возбуждения. Характеристики прямолинейны, но не параллельны естественной характеристике.
Для построения искусственной характеристики во второй зоне (прямая 3 на рис.1.2), учитывая, что при таком способе регулирования P=const, вначале нужно определить его значение по формуле 1.9, используя соответствующие координаты.
 (1.9)
(1.9)
Затем, задавая произвольное, но близкое к нулю, значение момента, найти еще одну точку с координатами {  }, рассчитав значение скорости по формуле 1.10.
}, рассчитав значение скорости по формуле 1.10.
 (1.10)
(1.10)
Выбор тиристорного преобразователя
Описать назначение, принцип действия, области применения, достоинства и недостатки тиристорных преобразователей.
Для выбора ТП необходимо знать значения тока и напряжения в цепи якоря и в цепи возбуждения электродвигателя.
Рассчитать ток в цепи якоря по формуле:
 (1.11)
(1.11)
Рассчитать ток в цепи обмотки возбуждения по формуле:
 (1.12)
(1.12)
В цепь якоря подбирают реверсивный тиристорный преобразователь, т.к. в процессе регулирования необходимо менять направление вращения вала, в цепь обмотки возбуждения - нереверсивный. Следует иметь в виду, что в некоторых случаях тиристорный агрегат может включать в себя оба преобразователя.
По каталогам известных фирм-производителей (ссылка на каталог обязательна) выбрать реверсивный тиристорный преобразователь, исходя из условий (формулы 1.13, 1.14), и нереверсивный ТП – из условий (формулы 1.15, 1.16):
 (1.13)
(1.13)
 (1.14)
(1.14)
 (1.15)
(1.15)
 (1.16)
(1.16)
Аргументировать свой выбор, отобразить внешний вид выбранных ТП, обозначить их основные технические характеристики и функциональные возможности.
Указать, какие задачи управления электродвигателем реализуют данные тиристорные преобразователи.
Привести схемы подключения ТП к обмоткам электродвигателя, описать особенности работы данных схем.
Дата добавления: 2016-09-06; просмотров: 1867;
Поиск по сайту
Узнать еще
- I. Выборы: понятие, значение и виды.
- IV. ВЫБОР НАЧАЛЬНЫХ И КОНЕЧНЫХ ПАРАМЕТРОВ ПАРА
- Алгоритм выбора многофункциональных критериев
- Алгоритмическая структура «выбор»
- Антропологическая выборка
- Аудиторская выборка
- Б) выбор маршрутов движения к ЗС ГО и расчет общего времени укрытия
- Билет №16. Пейзаж в творчестве передвижников. Анализ творчества И. Левитана, А. Куинджи, И. Шишкина (по выбору)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
