Схема регулирования ТП-Д
 Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием.
Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием.
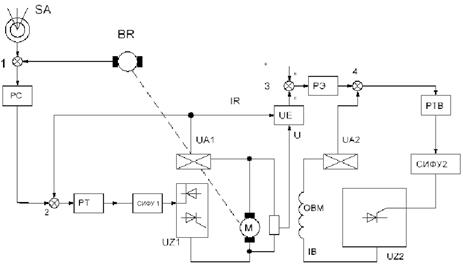
Рис.1.1 Двухконтурная схема регулирования
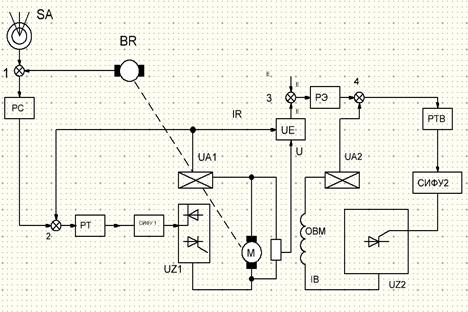
Рис. 3.1. Функциональная схема двухконтурного подчинённого регулирования по системе ТП-Д
В данную схему входят: SA – программируемый логический контроллер или ПК с соответствующим ПО, т.е. электронное устройство, которое задаёт требуемую технологическим процессом скорость вращения вала двигателя. Сигнал с него одновременно поступает и в основной контур, и во вспомогательный контур.
В основной контур входят: BR – тахогенератор, который измеряет фактическую скорость вращения вала прямым измерением; PC - реле скорости; РТ – реле тока; СИФУ1 – система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал; UZ1 – реверсивный тиристорный преобразователь; UA1 – измеряющее разделительное устройство, с помощью которого косвенным методом (по напряжению и току) измеряется фактическая скорость вращения вала; UE – определение напряжения на обмотке якоря.
Во вспомогательный контур входят: РТВ – реле тока обмотки возбуждения; СИФУ2 - система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал; UZ2 – неревесивный тиристорный преобразователь, UA2 - измеряющее разделительное устройство.
Обозначенные на схеме элементы под номерами 1, 2, 3, 4 – сравнивающие устройства.
Основной контур обеспечивает регулирование скорости вращения вала двигателя в первой зоне изменением напряжения на зажимах якоря.
Вспомогательный контур является подчинённым и осуществляет регулирование во второй зоне за счет уменьшения (ослабления) магнитного потока, создаваемого обмоткой возбуждения.
3.1.3 Выбор ДПТ НВ
Исходные данные представлены в таблице 3.1 [1].
Таблица 3.1
| Вариант | Заданная диаграмма | М1, | М2, | М3, | М4 | t 1 | t 2, | t 3, | t 4, | n, | Величина напряжения, |
| Н*м | Н*м | Н*м | Н*м | с | с | с | с | об/мин | В | ||
| 4. | рис.3.2 |
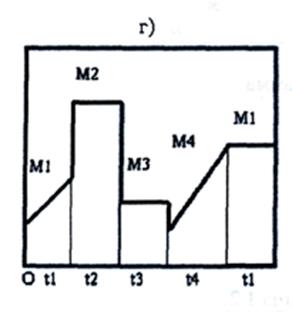
Рис.3.2 Заданная диаграмма моментов
Для выбора двигателя производим построение временной диаграммы моментов (рис.3.3) с учётом изменений или постоянства моментов в определённые промежутки времени.

Рис. 3.3 Временная диаграмма моментов для заданного АЭП с ДПТ НВ
Затем определяем продолжительность включения
ПВ=  (3.1)
(3.1)
ПВ= 
Определяем эквивалентный момент по формуле 3.2. Коэффициент  , учитывающий продолжительность включения двигателя, выбирается из таблицы 3.2:
, учитывающий продолжительность включения двигателя, выбирается из таблицы 3.2:
Таблица 3.2
| ПВ | |||||
|
| 0,2 | 0,4 | 0,6 | 0,8 |
Мэ=  Н*м (3.2)
Н*м (3.2)
Мэ=  Н*м
Н*м
Находим необходимую эквивалентную мощность, исходя из эквивалентного момента и заданной скорости вращения якоря
 (3.3)
(3.3)
Так как согласно варианта n= 1070 об/мин, тогда по формуле 3.3

Искомая номинальная мощность двигателя принята равной (формула 3.4)
Pном=(1,1-1,3)*PЭ (3.4)
Рном=(1,1-1,3) * 26.625кВт=(29.2875-34.6125) кВт.
Способ соединения ОЯ и ОВ – независимый, так как в промышленных АЭП для двухзонного регулирования применяются двигатели постоянного тока с независимым возбуждением.
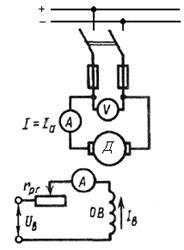
Рис. 3.4 Схема соединений ОЯ с ОВ в ДПТНВ
По справочным данным (ссылка на источник информации обязательна) выбран электродвигатель постоянного тока 4ПН225S.
· Номинальная мощность: Pном=32 кВт
· Номинальное напряжение: U=220В
· Номинальная частота вращения nном=1060 об/мин,
· Максимальная частота вращения двигателя nmax=2500 об/мин
· Номинальный ток: Iном=164 А
· КПД=85%
Электрические машины постоянного тока серии 4П с высотой оси вращения 200–280мм предназначены для комплектации электроприводов постоянного тока общепромышленного назначения (бумагоделательных, красильно-отделочных и подъемно- транспортных машин, полимерного оборудования, а также буровых станков и вспомогательных агрегатов экскаваторов).
Режим работы электродвигателей продолжительный S1 по ГОСТ 183. Электродвигатели допускают работу в режимах S2-S8 по ГОСТ183 при условии, что среднеквадратичный ток за цикл не превышает номинальное значение.
Возбуждение электродвигателей независимое 110, 220 В. Степень защиты электрических машин — IP23 по ГОСТ17494, электродвигатели типа 4ППМ, 4ПОМ и 4ПБМ имеют степень защиты IP44, вводное устройство всех типов машин —IP44.
Способ охлаждения электродвигателей IC01, IC06, IC0041, IC0141, IC17, IC37 по ГОСТ20459 .
Механические воздействия по группе М8 ГОСТ17516 - 190Е. Электродвигатели выпускаются в конструктивном исполнении IMB3, IMV5, IMV6, IMВ35, IMV1, IMV2, IM1002, IM1012, IM1032, IM2002, IM2012, IM2032 по ГОСТ2479 .
Структура условного обозначения:
4П — обозначение серии машины;
Х — обозначение машины в зависимости от исполнения по степени защиты и способа охлаждения: Ф — защищенное P23 с независимой вентиляцией от постороннего вентилятора IC06; Н — защищенное IP23 с самовентиляцией IC01; П — закрытое IP44 (защищенное IP23) продуваемое от постороннего вентилятора IC37 (IC17); Б — закрытое IP44 с естественной вентиляцией IC0041; О — обдуваемое ICO141.
М — модификация серии 4П;
ХX — электрическая модификация: Г — генератор; 2В — возбудитель; отсутствие знака — двигатель.
ХХХ — высота оси вращения в мм;
Х — условная длина сердечника якоря: S — первая длина; М — вторая длина; L — третья длина; Х — повышенная точность; отсутствие знака — нормальная точность;
Г — наличие тахогенератора;
Х — температурная защита;
УХЛ4 — климатическое исполнение и категория размещения по ГОСТ15150.
Электрические машины закрытого и обдуваемого исполнений изготавливаются по отдельным заказам с параметрами, согласованными заказчиком с изготовителем.
Условия эксплуатации машин серии 4П: высота над уровнем моря — до 1000 м, температура окружающего воздуха — от 5 до 40 °С, относительная влажность воздуха до 80% при температуре 25 °С и при более низких температурах без конденсации влаги. Окружающая среда — невзрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию. Воздействие механических факторов внешней среды — по группе Ml ГОСТ 17516-72.
С помощью формул 3.5 – 3.9 построена естественная механическая характеристика (прямая 1, на рис. 3.5).
 (3.5)
(3.5)
 (3.6)
(3.6)
 (3.7)
(3.7)
 (3.8)
(3.8)
 (3.9)
(3.9)

Для определения требуемой зонности регулирования, проведена прямая, соответствующая заданной скорости вращения вала двигателя (прямая 2, на рис 3.5), на которой отмечены заданные в условии моменты. В данном случае мы имеем двух зонное регулирование.
ω, рад/с
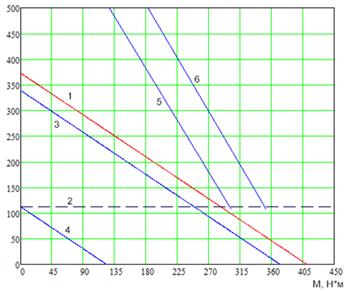
Рис. 3.5 Естественная и искусственные механические характеристики
Принимаем, что в первой зоне скорость вращения вала двигателя регулируется изменением напряжения на зажимах якоря.
В первой зоне регулирования характеристики, при регулировании скорости вращения вала двигателя изменением напряжения на якоре, сохраняют свою жесткость, следовательно, для построения искусственных характеристик в этом случае достаточно через требуемую точку провести прямые, параллельные прямой естественной характеристики (прямые 3 и 4, на рис.3.5).
Принимаем, что во второй зоне регулирование осуществляется за счет ослабления магнитного потока, создаваемого обмоткой возбуждения. Характеристики в этом случае прямолинейны, но не параллельны естественной характеристике. Регулируется скорость уменьшением магнитного потока, создаваемого обмоткой возбуждения.
При построении искусственной характеристики во второй зоне (прямая 5, на рис.3.5), учитывая, что при таком способе регулирования P = const для данной характеристики, определено его значение по формуле 3.10.

 (3.10)
(3.10)

Затем взято произвольное, но близкое к нулю, значение момента, и найдена еще одна точка с координатами {  }.
}.

 (3.11)
(3.11)
Аналогично были произведены расчёты для прямой 6:
 (3.12)
(3.12)

 (3.13)
(3.13)
3.1.3 Выбор тиристорного преобразователя
Тиристорный преобразователь предназначен для преобразования трехфазного переменного напряжения в постоянное, и регулирования его действующего значения на активной, активно-индуктивной и активно-ёмкостной нагрузке. Регулирование осуществляется за счет изменения угла задержки отпирания силовых тиристоров.
Для данного привода выбран тиристорный преобразователь компании ООО “Звезда-Электроника” ТРС-ДПТ. В одном шкафу реализованы тиристорный преобразователь реверсивный для обмотки якоря и тиристорный преобразователь нереверсивный для обмотки возбуждения. Схема подключений приведена на рис. 3.6.
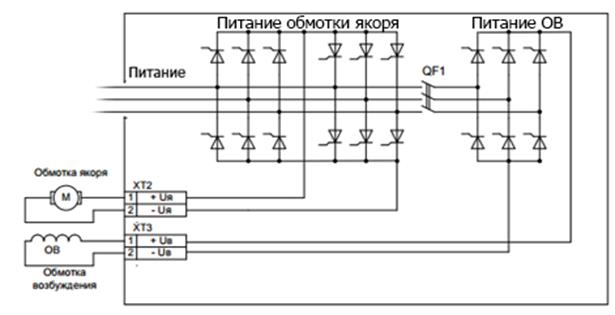
Рис.3.6 Схема подключения ТРС к обмоткамДПТ НВ
Данный комплектный преобразователь выбран по выходному напряжению обмоток якоря и возбуждения.
Выбор ТП осуществлён по:
· Регулируемому диапазону напряжений 0..500В.
· По номинальному току двигателя Iном=164 А.
· По перегрузочной способности: I=1,5*Iн в течении 30 сек.
В данном комплектном тиристорном преобразователе реализован ряд защит:
· Защита от короткого замыкания на выходе.
· Защита от перегрузки длительным током.
· Защита от перегрева тиристоров, которая реализована с помощью датчика температуры.
· Защита от потери фазы или “слипания” фаз.
· Защита от потери поля возбуждения.
Технические характеристики реверсивного преобразователя приведены в таблице 3.3
Таблица 3.3
| Выходное напряжение питания обмотки якоря | 0..500 В, регулируемое |
| Выходное напряжение питания обмотки возбуждения | 0..500 В, регулируемое |
| Регулирующий элемент | Тиристор |
| Торможение | Реверсом (противовключением) |
| Сигнал управления | 0..10 В, 0..20 мА, 4..20 мА |
| Вспомогательное питание для системы управления | 198-242 В 50Гц |
| Режим ограничения выходного тока или напряжения | Есть |
| Тип тиристорных модулей | Semikron |
В качестве регулирующего элемента в устройстве используются тиристорные модули, каждый из которых содержит по два тиристора. Силовое напряжение для питания выпрямителя обмотки якоря подключается к клеммной колодке XT1 (cм. рис.3.6). Выход выпрямителя для питания обмотки якоря – XT2, выход для питания обмотки возбуждения – XT3(см. рис.3.6). На лицевой панели размещены элементы индикации и управления. Внешние провода и кабели для подключения напряжения сети, нагрузки и цепей управления вводятся в шкаф.
Преобразователь состоит из двух выпрямителей: один предназначен для питания обмотки якоря (см. рис. 3.6), второй – для питания обмотки возбуждения. Выпрямитель питания обмотки якоря – реверсивный, он состоит из двух мостов, соединенных встречно.
Дата добавления: 2016-09-06; просмотров: 4270;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- II. Электрическая схема и принцип действия.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pис. 2.23. Схема межсистемных венозных анастомозов (схема).
- V. Упрощенная схема замещения трансформатора и внешняя характеристика.
- А – схема структурная; б – схема эквивалентная
- Агрегаты регулирования потока рабочего тела по расходу и давлению
- Агрегація криптографічних перетворень, криптографічна схема

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
