Выбор тахогенератора
Тахогенераторы - коллекторные машины, являющиеся генераторами постоянного тока с последовательным или независимым возбуждением постоянными магнитами.
Тахогенераторы ТГ постоянного тока функционально предназначены для преобразования частоты вращения вала в пропорциональное частоте выходное напряжение постоянного тока.
Выходное напряжение тахогенератора используется для дистанционного измерения или индикации частоты вращения исполнительных механизмов и для выработки управляющих сигналов в системах автоматического регулирования.
Крепление тахогенераторов - за корпус.
Выбран тахогенератор ТГ-1. Технические данные тахогенератора см. в таблице 3.4
Таблица 3.4
| Параметры | ТГ-1 |
| Тип возбуждения | электро- магнитное |
| Напряжение возбуждения, В | задается током |
| Ток возбуждения, А | 0,3±0,075 |
| Номинальная частота вращения, об/мин | 1100±11 |
| Активное сопротивление нагрузки, Ом | 10000±300 |
| Крутизна изменения выходного напряжения при Rн=100000 Ом, Uв=110В, мВ*мин/об | 91,54-101,18 |
| Диапазон рабочих температур, °С | от-40 до +70 |
| Верхнее значение относительной влажности воздуха, % | 98 при 45°С |
| Масса, кг, не более | 1,79 |
| Общий гарантийный срок хранения и эксплуатации, год |
Тахогенератор ТГ-1 выбран по следующим параметрам:
· Номинальной частоте вращения 1100±11 об/мин, что соответствует номинальной частоте вращения вала двигателя 1070 об/мин.
· Режиму работы – S1 продолжительному, что соответствует режиму работы выбранного двигателя.
· По минимальной и максимальной частоте вращения вала тахогенератора 0,1 до 6000 об/мин.
Данный ТГ пригоден для совместной установки с ДПТ4ПН225S,
АЭП с АДК
3.1.5 Схема регулирования ПЧ-АД
Данный АЭП с АДК реализован по системе ПЧ-АД.
Функциональная схема частотного регулирования представлена на рис.3.7
Рис.3.7. Функциональная схема частотного регулирования
Условные обозначения на схеме (рис.3.7): U1,В; f1, Гц - входное значение, соответственно, амплитуды питающего напряжения и частоты. Uu,В; Uf, Гц – значения, соответственно, амплитуды и частоты, поступающие с контроллера. Uвых,В; fвых,Гц - выходные значения, соответственно, амплитуды и частоты, подаваемые на обмотку статора и соответствующие заданной частоте вращения ротора. УВ - управляемый выпрямитель, который преобразовывает переменное напряжение в постоянное. УУ - управляющее устройство (может быть программируемым логическим контролером или ЭВМ), которое формирует значение амплитуды и частоты, соответствующие заданной частоте вращения ротора. УИ - управляемый инвертор, который осуществляет преобразование сформированного значения амплитуды напряжения из постоянной величины в переменную.
3.1.6 Выбор асинхронного двигателя
Исходные данные представлены в таблице 3.5[1] и на рис. 3.6.
Таблица 3.5
| № варианта | Заданная диаграмма | М1, | М2, | М3, | М4 | t 1 | t 2, | t 3, | t 4, | n 2 |
| Н*м | Н*м | Н*м | Н*м | с | с | с | с | об/мин | ||
| Рис.3.6 |
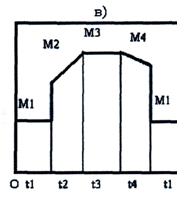
Рис. 3.6 Заданная диаграмма моментов производства механизма
Для выбора двигателя построена временная диаграмма моментов, приведенная на рис. 3.7
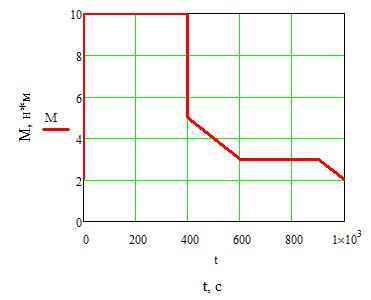
Рис. 3.7 Временная диаграмма моментов для АЭП с АДК
Определена продолжительность включения (формула 3.15):
ПВ=  (3.15)
(3.15)
ПВ= 
Определен эквивалентный момент по формуле 3.16.
Мэ=  (3.16)
(3.16)
где Mi - момент в определенный промежуток времени, Н*м; ti - продолжительность данного промежутка, сек.; Σtраб - суммарное время работы двигателя, сек.; Σtn - суммарное время пауз в работе, сек;  - коэффициент, учитывающий продолжительность включения двигателя (см. таблицу 3.7).
- коэффициент, учитывающий продолжительность включения двигателя (см. таблицу 3.7).
Таблица 3.7
| ПВ | |||||
|
| 0,2 | 0,4 | 0,6 | 0,8 |
Учитывая, что Σtnауз =0, получено:
Мэ=  Н*м
Н*м
Определена необходимая эквивалентная мощность, исходя из эквивалентного момента и заданной скорости вращения якоря:
 , кВт (3.16)
, кВт (3.16)
 ,кВт (3.17)
,кВт (3.17)
Так как согласно варианту n= 748 об/мин, тогда по формуле (3.17)

Найдено заданное скольжение, используя формулу (3.18):
 (3.18)
(3.18)

Определена номинальная мощность двигателя по формуле 3.19.
Pном=(1.1-1,3)∙PЭ (3.19)
Pном=(1.1-1,3)∙0.5429 кВт = (0.597 – 0.705) кВт
Из полученного интервала мощностей, номинальной частоты вращения, а также по скольжению выбран двигатель, определены его номинальные значения и пусковые свойства.
По справочным данным (ссылка на источник обязательна) выбран двигатель типа 4А80В8У3 со следующими данными:
· Р=0,55 кВт
· Синхронная частота вращения n1 = 750 об/мин
· η=64%
· cosφ = 0.65
· Sк= 34%
· Sном= 9%
· mK= 1.7
· mM= 1.2
· mП= 1.6
На основании технических данных двигателя и после преобразования формулы 3.20 получаем значение номинальной скорости вращения ротора nном.
 , % (3.20)
, % (3.20)

По формуле 3.21 определяем значение номинального момента Мном.
 (3.21)
(3.21)

На основании табличных значений относительных моментов mK и mП и используя формулы 3.22 и 3.32, определяем, соответственно, значения критического момента Мк и пускового момента Мп , которые необходимы для построения естественной механической характеристики.
 (3.22)
(3.22)
отсюда 
 (3.23)
(3.23)

Построена естественная механическая характеристика (см. рис 3.8)
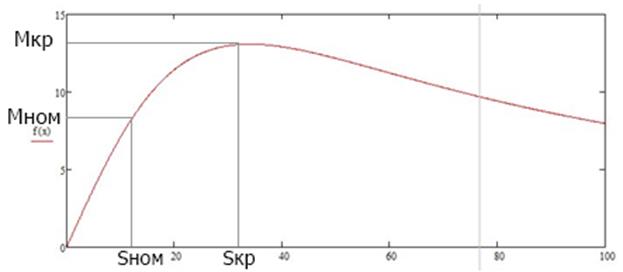
Рис.3.8.Естественная механическая характеристика
Для определения максимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определяем во сколько раз изменится скорость для максимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной.
По формуле 3.24 определяем скорость вращения ротора электродвигателя:
 (3.24)
(3.24)
n2ест = (1- 0,15)683,506=580,98 об/мин
где  - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике.
- величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике.
Соответственно, при скольжении , скорость ротора равна  .
.
По формуле 3.25 вычислено, во сколько раз увеличилась скорость ротора для искусственной характеристики:
 (3.25)
(3.25)
Так как скорость вращения ротора прямо пропорциональна частоте питающей сети, то вычислено, как увеличилась частота питающей сети, по формуле 3.26:
 (3.26)
(3.26)

Так как полученная частота удовлетворяет условию  , то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя.
, то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя.
Для определения минимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определено, во сколько раз изменится скорость для минимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной (на естественной характеристике двигатель работает при частоте питающей сети, равной 50Гц).
По формуле 3.24 следует определена скорость вращения ротора электродвигателя:
(3.24)
n2ест = (1- 0,02)683,506=669,84 об/мин
где - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению минимального момента для заданной скорости на искусственной характеристике.
Соответственно, при скольжении , скорость ротора равна .
Вычислено, во сколько раз уменьшилась скорость ротора для искусственной характеристики по формуле 3.27:
 (3.27)
(3.27)

Вычислено, как уменьшилась частота питающей сети (формула 3.28):
 (3.28)
(3.28)
Так как полученная частота удовлетворяет условию  , то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя.
, то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя.
Рабочие части искусственных характеристик – прямолинейны, т.к. частотное регулирование, не зависимо от способа регулирования, сохраняет жёсткость рабочей части искусственных характеристик.
Для выбора способа регулирования во второй зоне определяем величину превышения напряжения на искусственной характеристике, соответствующей максимальному моменту.
Учитывая, что отношения амплитуд и частот на разных характеристиках приблизительно равны, воспользуемся отношением (формула 3.29)
 (3.29),
(3.29),
где: Umax – максимальная требуемая амплитуда напряжения, В; Uном – номинальное значение напряжения питающей сети, В; fmax –максимальная выходная частота, Гц (определяется по формулам 2.12-2.14); fном – частота питающей сети, Гц.
Определив превышение напряжения в %, проверяем, удовлетворяет ли это превышение условию  :
:

Т.к. условие не выполнено, то способ регулирования – векторный с изменением только частоты питающего напряжения.
Для определения требуемой зонности регулирования, вынесена в большем масштабе рабочая часть естественной характеристики (прямая 1, см рис. 3.9) на отдельный график.
Затем проведена прямая, соответствующая заданному скольжению (прямая 6, см. рис. 3.9), на которой отмечены заданные в условии моменты.
В данном случае имеется одно зонное регулирование (искусственные характеристики расположены только во 2-ой зоне – прямые 2,3,4,5, см. рис. 3.9).
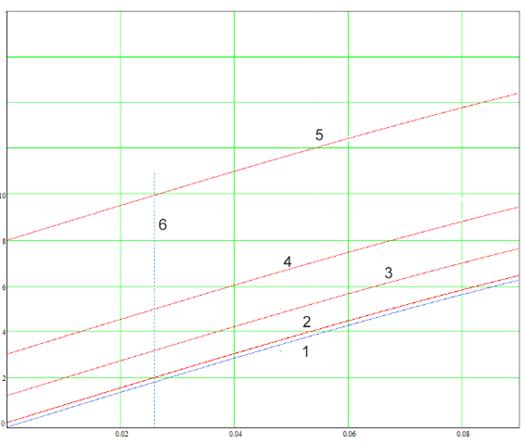
Рис.3.9 Рабочая часть естественной и искусственных характеристик
3.1.7. Выбор частотного преобразователя
Асинхронный двигатель с короткозамкнутым ротором является сегодня самым массовым и надежным устройством для привода различных машин и механизмов. Его два основных недостатка – это невозможность простой регулировки скорости вращения ротора, очень большой пусковой ток - в пять, семь раз превышающий номинальный. Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Частотный преобразователь с широтно–импульсным управлением (ПЧ с ШИМ) снижает пусковые токи в 4-5 раз. Он обеспечивает плавный пуск асинхронного двигателя и осуществляет управление приводом по заданному закону частотного управления.
Частотный преобразователь дает экономию по потреблению энергии до 50%. Появляется возможность включения обратных связей между смежными приводами, т.е. самонастройки оборудования под поставленную задачу и изменение условий работы всей системы.
Двигатели российского производства на низких частотах сильно греются, это следует учитывать при выборе частотного преобразователя.
Выбор осуществляется по следующим параметрам:
· Мощности, большей 0,55 кВт в 1,8 раз
· Напряжению, равному 400 В (380В-500В)
· По номинальному току (см. формулу 3.24)
Iн= Рн/(Uн·√3·ηн·cosφ) (3.24)
Iн= 550/ 380*1.7*0.64*0,65=2,8А
· По типу защиты:
o Защита от перегрева привода
o Исчезновение фазы на входе привода
o Исчезновения фаз двигателя привода
o Короткое замыкание между фазами двигателя привода
o Сверхток между выходной фазой и землей (только при включенном питании) привод
o Тепловая защита двигателя
o Функция защиты от значительного уменьшения напряжения фазного питания привода
o Цепи защиты от повышенного и пониженного напряжения линии питания привода
Выбран преобразователь частоты ATV312 1 кВт 500В 3ф, произведённый фирмой Schneider Electric (ссылка на источник обязательна).
Каталожный номер: ATV312H055N4.
Технические характеристики (см. табл.3.8) удовлетворяют характеристикам выбранного двигателя.
Преобразователь Altivar 12 наряду с традиционными для такого класса ПЧ функциями располагает также следующими функциональными возможностями:
· переключение между локальным управлением и управлением через клеммник;
· законы управления двигателем: скалярный, векторный и квадратичный; пропуск частотного окна;
· заданные скорости;
· ПИД-регулятор;
· S- и U-образные кривые разгона-торможения, переключение темпов разгона-торможения;
· остановка на выбеге и быстрая остановка;
· пошаговая работа (JOG);
· конфигурирование аналоговых и дискретных входов;
· контроль недогрузки и перегрузки;
· отображение состояния дискретных входов на экране ПЧ; конфигурирование отображения пара
Таблица 3.8
| Семейство продуктов | Altivar 312 |
| Тип изделия или компонента | Привод с регулируемой частотой вращения |
| Назначение изделия | Асинхронные электродвигатели |
| Стиль сборки | С радиатором |
| Наименование компонента | ATV312 |
| Фильтр помех | Встроенный |
| [Us] номинальное напряжение питания | 380...500 V (- 5...5 %) |
| Частота сети питания | 50...60 Hz (- 5...5 %) |
| Число фаз сети | 3 фазы |
| Мощность двигателя, кВт | 1 kW |
| Линейный ток | 3,7 A для 500 V 4,9 A для 380 V , 1 kA |
| Полная мощность | 3,2 kVA |
| Макс. переходной ток | 4,5 A для 60 s |
| Рассеиваемая мощность, Вт | 37 W при номинальной нагрузке |
| Диапазон скоростей | 1...50 |
| Профиль управления асинхронным электродвигателем | Бессенсорное векторное управление двигателем с помощью сигнала ШИМ Заводская настройка: постоянный момент |
| Питание | Внутреннее питание для логических входов при 19...30 V ? 100 A для защита от перегрузки и короткого замыкания Внутреннее питание для регулировочного потенциометра (2,2 - 10 кОм) при 10...10,8 В ? 10 A для защита от перегрузки и короткого замыкания |
| Протокол порта обмена данными | CANopen Modbus |
| Опциональная карта | DeviceNet коммуникационная карта Fipio коммуникационная карта Modbus TCP коммуникационная карта Profibus DP коммуникационная карта Шлейф CANopen коммуникационная карта |
Законы регулирования:
Возможен выбор одного из 3 законов управления двигателем в зависимости от применения:
Скалярный закон (U/f-регулирование): простой закон управления двигателем с поддержанием постоянного соотношения между напряжением и частотой питания двигателя и возможностью подстройки этого соотношения на нижней скорости. Предназначен для небольших конвейеров, параллельно включенных двигателей и т.д.
Векторный закон (векторное управление потоком без обратной связи по скорости): закон, гарантирующий получение оптимальных характеристик двигателя мощностью равной или отличающейся на один типоразмер от мощности ПЧ. Этот закон позволяет получить наилучшие динамические характеристики, в том числе и при работе на нижней скорости. Предназначен для управления высокодинамичными приводами.
Квадратичный закон (Kn2) закон для механизмов с вентиляторной характеристикой, позволяющий получить момент пропорциональный скорости. Закон позволяет оптимизировать потребляемую энергию в зависимости от нагрузки механизма. Предназначен для управления насосными, вентиляционными установками и т.д.
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части принято разделять на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Исторически первыми появились преобразователи с непосредственной связью, в которых силовая часть представляет собой управляемый выпрямитель и выполнена на тиристорах. Система управления поочередно отпирала группы тиристоров, формируя выходной сигнал. В настоящее время этот метод преобразования частоты в новых разработках ПЧ не используется.
Все преобразователи частоты компании Schneider Electric построены по схеме с явно выраженным звеном постоянного тока (рис. 3.11).
В преобразователях этого класса используется двойное преобразование электрической энергии.
Входное синусоидальное напряжение (L1, L2, L3) с постоянной амплитудой и частотой выпрямляется в выпрямительном блоке (BR) и фильтруется и сглаживается в блоке фильтрации (BF), в результате получается постоянное напряжение. Этот узел называется звеном постоянного тока.
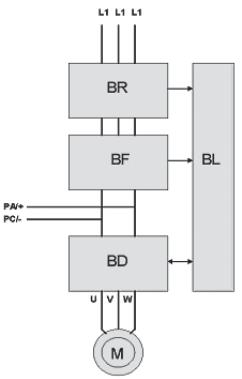
Рис.3.11 Преобразователи с явно выраженным звеном постоянного тока
Для формирования синусоидального переменного напряжения с регулируемой частотой служит блок преобразования (BD). В качестве электронных ключей, с помощью которых формируется выходной сигнал, применяются биполярные транзисторы с изолированным затвором IGBT.
Управляются перечисленные блоки по заранее запрограммированному алгоритму микропроцессорным модулем или блоком логики (BL-управляющее устройство).
Преобразователи частоты могут быть запитаны от внешнего звена постоянного тока. В этом случае защита ПЧ осуществляется быстродействующими предохранителям.
3.1.8 Выбор комплектного асинхронного привода
Ранее определен диапазон номинальных мощностей привода, равный
(0.597 – 0.705) кВт.
Исходя из этих данных, выбираем комплектный асинхронный электропривод.
Отдаем предпочтение марке SIEMENS, так как электрические двигатели данной фирмы являются ведущими в сфере приводных технологий. Все крупные предприятия региона КМА используют электродвигатели данной компании.
Техническая конструкция и популярность электродвигателей SIEMENS на рынке трёхфазных электродвигателей неразрывно связана с их качеством. Для гарантии высокого качества в процессе производства двигателей используется специальная система контроля и мониторинга.
Достоинством двигателей SIEMENS является усиленная изоляция ротора двигателя и встроенные датчики температуры, что даёт возможность надежного регулирования на низких частотах.
Выбираем серию асинхронных электродвигателей SIEMENS 1LA7, типа 1LA7073-2AA. Электродвигатели SIEMENS типа 1LA7 – являются самыми популярными на Российском и мировом рынках, подходят для большинства приводных задач.
Преимущества двигателей типа 1LA7:
· оптимальная подстройка и настройка, позволяющая оптимизировать большинство приводных задач;
· высокие показатели КПД и отличное соотношение цены и качества;
· надежность и долговечность всех составляющих узлов и элементов, гарантирующая продолжительный срок службы электродвигателя без необходимости систематического проведения профилактических и ремонтных мероприятий;
· соответствие международным стандартам и нормам;
· высокая безопасность для операторов и обслуживающего персонала;
Технические данные двигателя см. таблицу 3.9
Таблица 3.9
| Тип | Мощность, кВт | n2, об/мин | КПД, % | 
| n1, об/мин. | 
|
|
| 1LA7073-2AA | 0.55 | 0,76 | 1.7 | 1.6 |
На основании технических данных двигателя и после преобразования формулы 3.20 получаем значение номинальной скорости вращения ротора nном.
По формуле 3.21 определяем значение номинального момента Мном.
На основании табличных значений относительных моментов mK и mП и используя формулы 3.22 и 3.32, определяем, соответственно, значения критического момента Мк и пускового момента Мп , которые необходимы для построения естественной механической характеристики.
Пренебрегая активным сопротивлением статора, определяем Sкр:
 (3.25)
(3.25)
где  (3.26)
(3.26)

На основании полученных данных построена естественная характеристика для данного электродвигателя (см. рис.3.12).
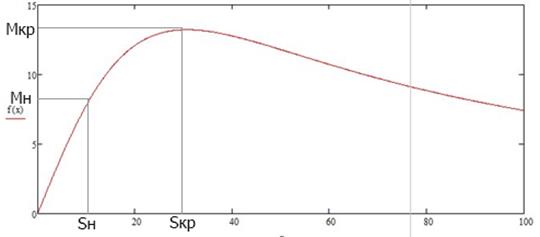
Рис.3.12 Естественная характеристика
Для определения зонности регулирования данного электродвигателя построена диаграмма искусственных и естественных характеристик (см. рис.3.13).
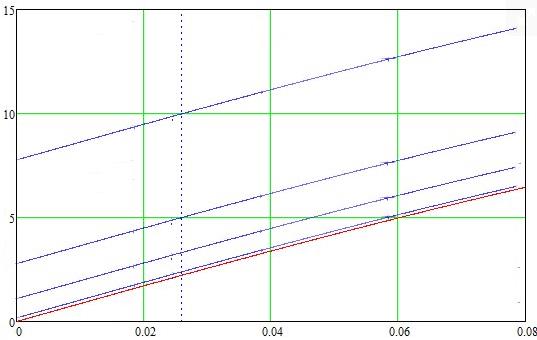
Рис.3.13 Рабочие части искусственных и естественной характеристик
Проведена рабочая часть естественной характеристики (прямая 1, см. рис.3.13), затем проведена прямая, соответствующую заданному скольжению (прямая 6, см. рис.3.13), на которой отмечены заданные в условии моменты.
В данном случае имеется однозонное регулирование (искусственные характеристики расположены только во 2-ой зоне – прямые 2,3,4,5, см. рис.3.13).
Для определения максимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определяем во сколько раз изменится скорость для максимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной.
По формуле 3.24 определяем скорость вращения ротора электродвигателя:
n2ест = (1- 0,15)675=573,75 об/мин
По формуле 3.25 вычислено, во сколько раз увеличилась скорость ротора для искусственной характеристики:
Так как скорость вращения ротора прямо пропорциональна частоте питающей сети, то вычислено, как увеличилась частота питающей сети, по формуле 3.26:

Так как полученная частота удовлетворяет условию  , то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя.
, то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя.
Для определения минимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определено, во сколько раз изменится скорость для минимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной (на естественной характеристике двигатель работает при частоте питающей сети, равной 50Гц).
По формуле 3.24 определена скорость вращения ротора электродвигателя:
n2ест = (1- 0,02)675=661,5 об/мин
Соответственно, при скольжении  , скорость ротора равна
, скорость ротора равна  .
.
Вычислено, во сколько раз уменьшилась скорость ротора для искусственной характеристики по формуле 3.2
Вычислено, как уменьшилась частота питающей сети (формула 3.28): 
Так как полученная частота удовлетворяет условию  , то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя.
, то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя.
Рабочие части искусственных характеристик – прямолинейны, т.к. частотное регулирование, не зависимо от способа регулирования, сохраняет жёсткость рабочей части искусственных характеристик.
Для выбора способа регулирования во второй зоне определяем величину превышения напряжения на искусственной характеристике, соответствующей максимальному моменту.
Учитывая, что отношения амплитуд и частот на разных характеристиках приблизительно равны, воспользуемся отношением (формула 3.29)
Проверяем, определив превышение значения амплитуды напряжения в %, удовлетворяет ли это превышение условию  :
:

Т.к. условие не выполнено, то способ регулирования – векторный с изменением только частоты питающего напряжения.
Для управления электродвигателями типа 1LA7 фирмой был разработан частотный преобразователь (ПЧ) серии SIEMENS SINAMICS G 110.
ПЧ этой серии характеризуется базовым набором функций, необходимых для промышленного применения в регулируемых приводах.
Технические данные см. таблицу 3.10.
Стандартные преобразователи SINAMICS G110 содержат управляющий модуль и силовой модуль. В модулях применена самая современная технология IGBT и цифровое микропроцессорное управление.
Силовые модули представлены на рис 3.15.
С данным двигателем используется силовой модуль на 1,1 кВт для обеспечения запаса по мощности. В комплекте используется базовая панель оператора для управления.
Таблица 3.10
| Показатели сетевого напряжения | 120-240 В 1 АС |
| Функции защиты по: | 1. пониженному напряжению 2. перенапряжению 3. перегрузке 4. включению на землю 5. короткому замыканию 6. блокировке двигателя 7. перегреву двигателя 8. перегреву преобразователя |
| Диапазон мощностей | 120 Вт-3,0 кВт |
| Высота установки | до 1000 м над уровнем моря без уменьшения мощности |
| КПД преобразователя | 90-94% для приборов <750 Вт 95% для приборов >750 Вт |
| Способность к перегрузкам | Ток перегрузки=1,5*номинальный выходной ток(т.е. 150% перегрузки) в течение 60 с, далее - 0,85*ном.выходной ток в течении 240с, время цикла 300 с. |
| Выходное напряжение для пользователя | 24 В на клеммах 6 и 7 (50 мА нерегулировано): 10 В на клеммах 8 и 10 (5 мА) |
| Предварительный ток | Меньше, чем номинальный выходной ток |
| Специфика управления | Линейный, квадратичный, многоточечный (настраиваемый) |
| Частота импульсов | 8 кГц (стандарт); 2кГц-16кГц (в шагах 2-кГц) |
| Постоянные частоты | 3, можно настраивать |
| Фильтруемая полоса частоты | 1, можно настроить |
| Цифровые входы | 3, настраиваемый, потенциально связанный; PNP, совместимый с Simatic. Low<5.high>10 V, максимальное входное напряжение 30 В. |
| Аналоговый вход | 1, для номинального значение (0 В-10 В, шкалируется или используется как 4-й цифровой вход) |
| Серийный интерфейс (вариант USS) | RS 485, для работы через протокол USSI |
| Длина проводов | макс. 25 м (экранированного) макс. 50 м (не экранированного) |
| Разрешение номинальных значений | 0,01 Гц цифровой, 0,01 Гц серийный, 10 Бит аналоговый (потенциометр двигателя 0,1 Гц) |
| Торможение | Торможение постоянным током |
| Тип защиты | IP 20 |
| Рабочая температура | -10 грC + 40 грС (до + 50 грС с уменьшением мощности) |
| Коэффициент мощности | COSф=0,95 |
| Значения выходной частоты | 0-650 Гц |
| Нормы | СE, c-tick, С-UL. Разрешение Гостехнадзора |
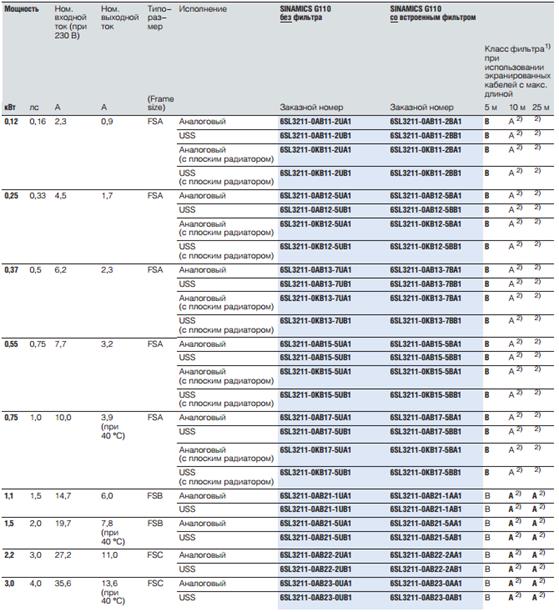
Рис 3.15 Силовые модули
Преимущества частотных преобразователей SIEMENS SINAMICS G 110:
· простота монтажа, подключения и параметрирования;
· компактность и эргономичность;
· разнообразие конфигураций, что говорит об универсальности и широком применении;
· высокая частота коммуникации, обеспечивающая бесшумную работу;
· аналоговый и USS вариант преобразователя.
Пример № 2
Во втором примере рассматриваются только выбор тахогенератора и тиристорного преобразователя для системы ТП-Д и выбор комплектного асинхронного электропривода для системы ПЧ-АД, поскольку эти варианты отличаются от рассмотренных в примере №1.
Дата добавления: 2016-09-06; просмотров: 5099;
Поиск по сайту
Узнать еще
- I. Выборы: понятие, значение и виды.
- IV. ВЫБОР НАЧАЛЬНЫХ И КОНЕЧНЫХ ПАРАМЕТРОВ ПАРА
- Алгоритм выбора многофункциональных критериев
- Алгоритмическая структура «выбор»
- Антропологическая выборка
- Аудиторская выборка
- Б) выбор маршрутов движения к ЗС ГО и расчет общего времени укрытия
- Билет №16. Пейзаж в творчестве передвижников. Анализ творчества И. Левитана, А. Куинджи, И. Шишкина (по выбору)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
