Плоская система произвольно расположенных сил
Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого действия, переносить параллельно ей самой в любую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится (рис. 10).
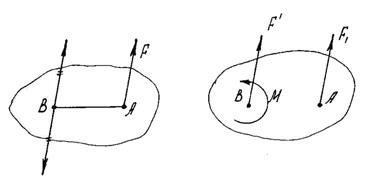
Рис. 10
Всякая плоская система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяет одной силой R, равной главному вектору системы и приложенной в центре приведения О, и одной парой с моментом МО, равным главному моменту системы относительно центра О (рис. 11).
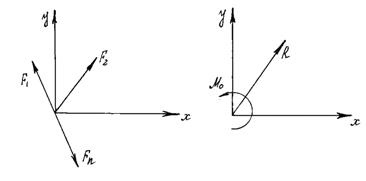
Рис. 11
Частные случаи приведения плоской системы сил к простейшему виду:
– если для данной системы сил R = 0 и МО = 0, то она находится в равновесии;
– если для данной системы сил R = 0 и МО ≠ 0, то она приводится к одной паре с моментом МО = ∑mО(Fi);
– если для данной системы сил R ≠ 0, М = 0, то она приводится к одной равнодействующей.
Основная форма условий равновесия.Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
∑Fix = 0 ∑Fiy = 0 ∑МО(Fi) = 0
Вторая форма условий равновесия. Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма моментов всех этих сил относительно каких-нибудь двух центров А и В и сумма их проекций на ось Ох, не перпендикулярную к прямой АВ, были равны нулю.
∑Fix = 0 ∑МА(Fi) = 0 ∑МВ(Fi) = 0
Третья форма условий равновесия.Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма моментов всех этих сил относительно любых трех центров А, В, С, не лежащих на одной прямой, были равны нулю.
∑МА(Fi) = 0 ∑МВ(Fi) = 0 ∑МС(Fi) = 0
Дата добавления: 2020-11-18; просмотров: 538;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- II Раціональне розміщення продуктивних сил.
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- II. Специальные обороты речи, усиливающие воздействие рекламы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
