Электрические тахогенераторы постоянного тока.
Предназначены для получения напряжения, пропорционального частоте вращения, и применяются в качестве электрических датчиков угловой скорости. В зависимости от вида выходного напряжения и конструкции они делятся на тахогенераторы постоянного и переменного тока.
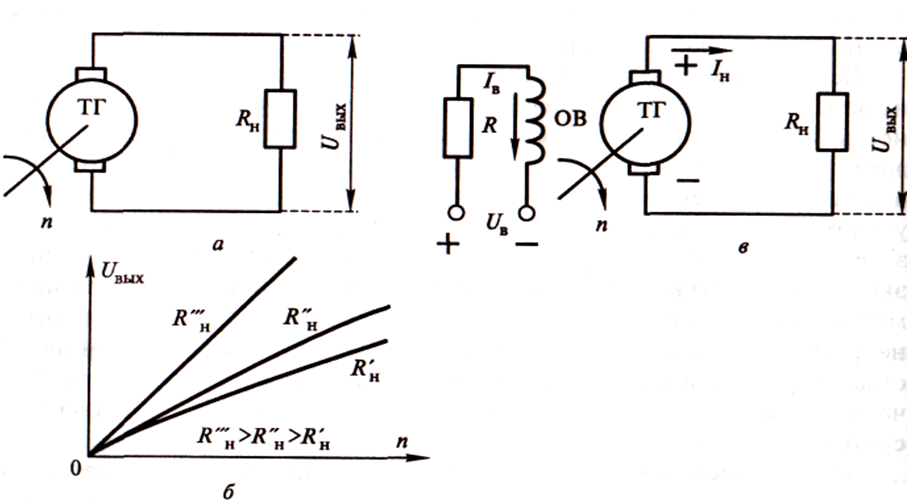
Тахогенераторы постоянного тока конструктивно представляют собой электрогенераторы постоянного тока и выполняются с возбуждением от постоянных магнитов или электромагнитов. На рис.50а приведена схема тахогенератора постоянного тока с возбуждением от постоянных магнитов. При вращении якоря тахогенератора с частотой n с его щеток снимается ЭДС, значение которой определяется по формуле:
Е=Ке×Ф×n
где Ке - коэффициент, зависящий от конструкции и схемы якоря; Ф — магнитный поток, n - частота вращения,
| Рис.50. Тахогенераторы постоянного тока: а - схема тахогенератора с возбуждением от постоянных магнитов; б - выходная характеристика; в— схема тахогенератора с независимым электромагнитным возбуждением |
 Для данного типа тахогенератора магнитный поток Ф является величиной постоянной, так как он создается постоянными магнитами. Поэтому ЭДС зависит только от частоты вращения якоря тахогенератора.
Для данного типа тахогенератора магнитный поток Ф является величиной постоянной, так как он создается постоянными магнитами. Поэтому ЭДС зависит только от частоты вращения якоря тахогенератора.
Измерительный прибор имеет сопротивление Rн, чем больше это сопротивление, тем точнее показания прибора.
Выходные характеристики рассмотренного тахогенератора для различных значений нагрузок приведены на рис.50б. Из этого рисунка следует, что с увеличением частоты вращения тахогенератора до определенного момента его выходное напряжение UВЫХ растет пропорционально и только при большой частоте линейность характеристики нарушается, причём чем больше сопротивление нагрузки RН, тем больше крутизна характеристики и тем больше ее линейность.
В автоматике применяют также тахогенераторы постоянного тока с независимым электромагнитным возбуждением. В таких тахогенераторах магнитный поток возбуждения ФВ создается специальной обмоткой возбуждения ОВ (рис.50в), которая располагается на полюсах статора.
Для тахогенераторов с независимым электромагнитным возбуждением ЭДС можно найти следующим образом
Е=Ке×Ф×n, где  ,
,
Iв –ток обмотки возбуждения, ω -число витков обмотки возбуждения,
Rм –магнитное сопротивление магнитной цепи тахогенератора.
Из последнего выражения следует, что ЭДС тахогенератора зависит не только от частоты вращения якоря, но и от магнитного потока обмотки возбуждения Фв, т. е. тока в обмотке возбуждения IВ. При изменении направления вращения якоря меняется полярность выходного сигнала. Приведенные выше формулы для определения ЭДС тахогенератора справедливы только при работе его на холостом ходу.
При работе тахогенератора с нагрузкой RН его выходное напряжение, снимаемое со щеток якоря, равно:
Uвых=Е–Iн×Rа,
где IН- ток нагрузки; Rа - сопротивление цепи якоря, которое состоит из сопротивления самой якорной обмотки и сопротивления переходного контакта между коллектором и щетками.
Выходная характеристика тахогенератора с независимым электромагнитным возбуждением напоминает выходную характеристику тахогенератора постоянного тока с возбуждением от постоянных магнитов (рис.50б).
При частоте вращения якоря тахогенератора, близкой к нулю, возникает так называемая зона нечувствительности, в пределах которой выходное напряжение равно нулю.
Конструкции тахогенераторов с возбуждением от постоянных магнитов проще, чем конструкции тахогенераторов с независимым возбуждением.
Дата добавления: 2020-11-18; просмотров: 796;
Поиск по сайту
Узнать еще
- Автоматизированный комплекс технической диагностики ЭЛЕКТРОПОЕЗДОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ
- Активные четырехполюсники постоянного тока
- Активные четырехполюсники постоянного тока
- Анализ магнитных цепей постоянного тока
- Анализ режимов цепей постоянного тока с применением закона Ома
- АНАЛИЗ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ ПОСТОЯННОГО ТОКА
- Аналитический метод исследования переходных процессов электропривода на базе математической модели двигателя постоянного тока
- Б) Объемная скорость кровотока.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
