Общий алгоритм функционирования БЦВМ
Общий алгоритм функционирования БЦВМ представлен на рис.10.
Программа начального пуска предназначена для автоматического начального ввода констант, подготовки памяти и устройств БЦВМ к функционированию, установки начального состояния счетчиков времени и передачи управления центральному диспетчеру
(ЦД).
Программа тактировки периодических вычислений осуществляет контроль сигналов времени и запись заявок на включение периодических программ в соответствии с заданным для них темпом.
ЦД управляет последовательностью включения следующих групп программ: тестовго и функционального контроля, взаимодействия процессоров (или БЦВМ, если БЦВС состоит из нескольких БЦВМ), подготовки к обработке и выдаче, местного диспетчера и диспетчера ввода/вывода.
Местный диспетчер определяет последовательность подключения программ, объединенных жестким циклом обращения, и группы фоновых программ с плавающим циклом обращения.
Диспетчер ввода/вывода состоит из программ приема информации с информационно-измерительных систем (ИИС) и отдельных датчиков, программы выдачи данных для управляемых объектов, ИИС и сигнализации.
Программы подготовки к обработке выполняют необходимое перекодирование и масштабирование данных, перепись информации из зоны входных данных (зон ОЗУ УВВ) в зону массива, подлежащего обработке в данный момент времени.
Программы подготовки к выдаче осуществляют перепись в буферную зону информации, а также определяют дисциплину выдачи в части формирования адреса очередной посылки.
Программы взаимодействия процессоров БЦВС обеспечивают максимальный обмен информацией и распределение функциональных задач по машинам для повышения надежности. Они осуществляют регулярный контроль и обмен информацией. Обмен информацией между процессорами упрощается благодаря возможности обращения к общей памяти (ОЗУ с двойным доступом).
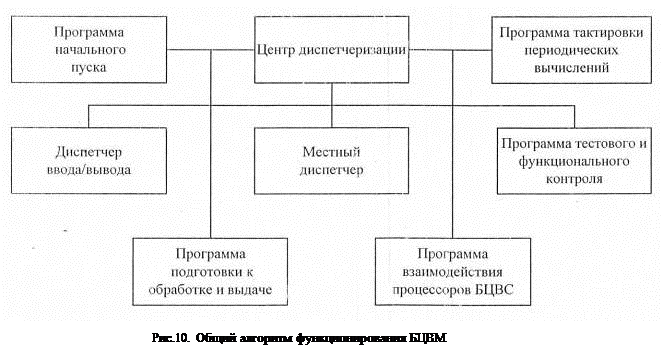
Программы контроля осуществляют контроль БЦВМ в процессе рабочего функционирования БЦВС в РМВ, функциональный контроль всей БЦВС вне рабочего режима. В рабочем режиме для контроля БЦВМ могут использоваться программный тест контроля всех устройств машины без изменения информации, хранящейся в ОЗУ при решении функциональных задач, и программы имитации полета для динамического контроля БЦВС в части взаимодействия алгоритмов частных задач и работоспособности БЦВС. При поступлении сигналов прерывания от средств контроля и отладки производится расширенный контроль БЦВС вне рабочего времени.
Алгоритмическое обеспечение БЦВМ
Эффективность обработки информации БЦВМ или БЦВС в значительной степени зависит от программного обеспечения (ПО) БЦВМ (БЦВС), взаимодействия аппаратной части (AЧ)ПO, адаптации ПО к условиям применения ЛА.
ПО разрабатывается одновременно с АЧ БЦВМ и является неотъемлемой сё частью. Состав ПО зависит от назначения БЦВМ. её технических характеристик.
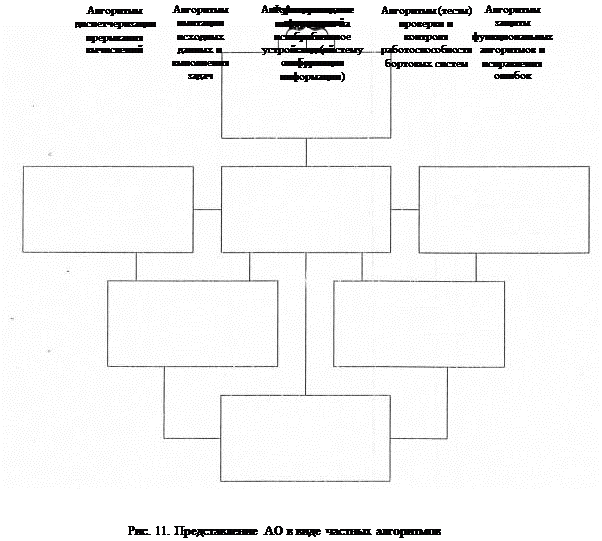
Исходными данными для проектирования ПО являются задачи, подлежащие решению БЦВМ. Анализ задач и режимов работы БЦВМ позволяет представить алгоритмическое обеспечение (АО) в виде частных алгоритмов (рис.11.).
Частные алгоритмы функционально связаны и реализуют единую задачу надежной и точной обработки информации и выработки управляющих сигналов с заданной дискретностью.
1. Алгоритмы комплексной обработки информации, используя избыточную информацию от нескольких датчиков, осуществляют её оптимальную обработку с целью повышения точности и достоверности значений входных параметров (алгоритмы калмановской фильтрации).
2. Функциональные алгоритмы (ФА) составляют основу АО и определяют основные характеристики БЦВМ (БЦВС). Набор функциональных алгоритмов отражает всю структуру приборного оборудования ЛА (ПНК). В свою очередь, ФА определяются назначением ЛА, его лётно-тактическими возможностями.
3. Алгоритмы защиты ФА, анализа и исправления ошибок повышают программную устойчивость БЦВМ к сбоям, позволяют осуществить анализ и исправление ошибок.
Исправление случайных ошибок осуществляется повторными вычислениями на различных уровнях алгоритма и выбором решений методом «голосования».
Для исправления систематических ошибок применяют алгоритмы блокировки.
4. Алгоритмы диспетчеризации и прерывания вычислении управляют ходом
вычислительного процесса и позволяют повысить эффективность использования
оборудования.
5. Алгоритмы тестового контроля позволяют осуществить периодическую проверку работоспособности БЦВМ и систем управления ЛА в целом.
6. Алгоритмы имитации позволяют проиграть полет ЛА по заданному маршруту и осуществить тренировку экипажа перед выполнением задания.
7. Алгоритмы выдачи информации реализуют сжатие информации и
преобразование к виду, пригодному для представления экипажу.
Программное обеспечение БЦВМ
Эффективность использования БЦВМ определяется совершенством не только её технического (аппаратного) исполнения, но и используемых средств программного обеспечения (ПО).
Программное обеспечение - совокупность программ системы обработки данных и программных документов, необходимых для эксплуатации этих программ (ГОСТ 1.9781-83-ПО - системы обработки данных).
ПО БЦВМ можно разделить на две части (рис.12.) - функциональное (специальное) и системное.
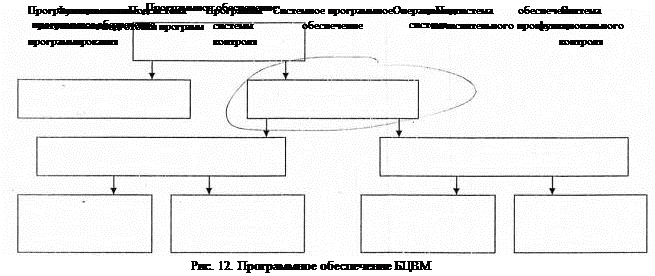
Функциональное ПО образуют алгоритмы и программы, реализующие функциональные задачи сбора и переработки информации на борту ЛА.
Системное ПО составляют алгоритмы и программы, описания и инструкции, предназначенные для автоматизации разработки программ, организации и контроля вычислительного процесса при реализации функциональных алгоритмов.
Системное ПО слабо зависит от функциональных задач. Оно разрабатывается параллельно с разработкой БЦВМ и поставляется одновременно с ней. Системное ПО можно подразделить на: система подготовки программ, система организации вычислительного процесса. Первая система предназначена для обеспечения процесса подготовки программ и включает систему автоматизации программирования (САП) и систему отладки программ. Вторая система позволяет организовать взаимодействие различных процессов и устройств БЦВМ и обеспечить эффективное использование технических ресурсов.
Процесс программирования можно разделить на два этапа:
- запись программы в содержательных обозначениях;
- кодирование.
Запись программы в содержательных обозначениях - это условная запись алгоритма решения задачи в общепринятых условных обозначениях, сравнительно просто расшифровываемых.
Кодирование - процесс перевода Программы на язык машины.
Языки программирования, построенные с учетом команд конкретной машины, называются машинно-ориентированными или автокодами (автокод 1:1 и др.).
Язык ассемблера - автокод 1:1, расширенный средствами связывания программ.
Автономная программа, составленная для ЭВМ одного типа, как правило, непригодна для реализации на ЭВМ другого типа.
Алгоритмическое языки позволяют:
- описывать алгоритм решения задачи в символах, значительно более удобных для человека по сравнению с символикой машинных команд и автокодов;
- описывать программы, написанные на алгоритмических языках, абстрагированные от системы команд конкретной машины.
Языки программирования, а также комплекс инструкций, правил, программных и аппаратурных средств, обеспечивающих автоматизацию программирования, образуют систему автоматизации программирования, характеристиками которой являются:
- объем памяти (компактность САП);
- время трансляции (производительность);
- качество создаваемой программы (эффективность САП);
- экономический эффект от применения САП.
Применение автокодов незначительно снижает эффективность программирования по сравнению с машинными кодами, в то время как применение алгоритмических языков значительно снижает эффективность (-0.6), но зато существенно снижает трудоемкость программирования.
Особенности программирования задач для БЦВМ.
1. Необходимость реализации алгоритмов управления и контроля в РМВ.
2. Необходимость синхронизации отдельных программ.
3. Стабильность и надежность программ в течение длительного времени.
4. Большая связность программ из-за разнообразия решаемых функциональных задач, связанных между собой общими переменными.
5. Необходимость обмена информацией с большим числом разнообразных внешних устройств (ВУ).
Математическое обеспечение БЦВМ
Математическое обеспечение (МО) подразделяется на две части: прикладное (функциональное или специальное) и общее (или системное),
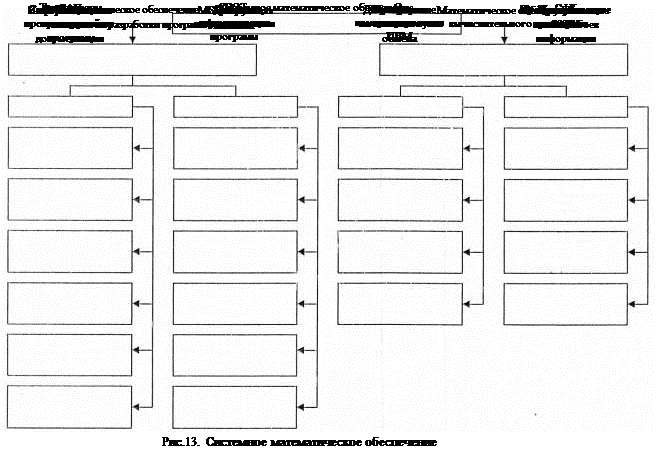
Прикладное МО (ПМО) - комплекс функциональных алгоритмов и программ, реализующих конкретную логику управления и обработки информации в СУ ЛА.
Системное МО (СМО) - совокупность алгоритмов и программ, а также описаний и инструкций, предназначенных для автоматизации трудоемких технологических этапов разработки программ, а также для организации и контроля вычислительного процесса в БЦВМ при её функционировании в СУ.
СМО состоит из следующих компонентов, которые указаны на рис.13.
МО технологических процессов разработки алгоритмов и программ включает в себя систему автоматизации программирования (САП), то есть языки программирования, трансляторы, СП и т. д., и систему отладки (СОТ) алгоритмов и программ.
МО вычислительного процесса включает в себя операционную систему (ОС) и систему функционального контроля (СФК).
Операционная система БЦВМ
Операционная система - основа всего системного математического обеспечения (СМО). Она обеспечивает начальный ввод информации в ЗУ БЦВМ при включении системы управления, пуск программ БЦВМ в заданном режиме работы, управление последовательностью решения задач в мультипрограммном режиме и в РМВ, диспетчеризацию обмена информации БЦВМ с внешними абонентами (ВА). В случае комилексирования нескольких БЦВМ или применения микропроцессорных БЦВС ОС обеспечивает организацию вычислений в мультипроцессорном режиме и взаимодействие между отдельными БЦВМ БЦВС.
Основное назначение ОС - распределение ресурсов и управления этими ресурсами с целью их эффективного использования. Основные ресурсы БЦВМ:
- процессорное время;
- оперативное запоминающее устройство (ОЗУ);
- периферийные устройства;
- математическое обеспечение (например, сервисные программы).
Основным ресурсом БЦВМ является процессорное время (ПВ). Многие задачи простаивают из-за незавершенности операций ввода-вывода. Для эффективного использования ПВ необходимо применение механизма распараллеливания процесса решения задач и работы на УВВ.
Виды операционных систем БЦВМ
В состав СМО могут входить: исполнительная операционная система (ИОС), служащая для управления выполнением готовых программ при работе БЦВМ в контуре управления ЛА; технологическая операционная система (ТОС), создающая среду для реализации САП, которые, в свою очередь, образуют среду для выполнения разрабатываемых программ; общефункциональная операционная система, обеспечивающая одновременное выполнение готовых программ и разработку новых.
ИОС служит для организации вычислительного процесса и реализует следующие функции: динамическое распределение ресурсов БЦВМ; управление опреациями обмена информацией между внешними устройствами (ВУ) и внешними абонентами (ВА); обеспечение языкового интерфейса между ИОС и прикладными программами.
Распределение процессорного времени может происходить из фиксированных или динамических приоритетов. Фиксированные приоритеты назначаются до начала работы БЦВМ и затем не меняются. Динамические приоритеты изменяются в ходе функционирования БЦВМ. Они могут определяться по известному закону, вследствие чего являться детерминированными. Если они вычисляются в прикладной программе, они называются недетерминированными.
Распределение ОП может происходить статическим и динамическим способами. При статическом способе ОП фиксируется до начала выполнения прикладных программ и рассчитывается исходя из максимально возможного объема потребной ОП, что может приводить к тому, что в ходе выполнения значительная часть ОП не будет использоваться. При динамическом способе ОП перераспределяется между задачами в соответствии с приоритетными запросами от них. Однако реализация динамического способа требует значительно больших накладных расходов, поскольку необходимо вести постоянный учет свободных и занятых участков ОП.
Повышения эффективности использования ОП можно достичь организацией виртуальной памяти, под которой понимается совокупность ОП и памяти на магнитных дисках, рассматриваемую как единую прямо адресуемую память, то есть память, допускающую произвольный доступ к любой её ячейке. Для этого при каждом обращении к памяти производится проверка, находятся ли требуемые данные в ОП или нет. Если нужных данных в ОП нет, то они отыскиваются во внешней памяти и постранично передаются в ОП.
Одной из характерных особенностей процесса функционирования БЦВМ является интенсивный обмен информацией с большим количеством разнотипных ВА, которые могут различаться разрядностью информационного тракта, форматом представления данных, скоростью обмена, длительностью хранения информации и т. д. Кроме того, ВА функционируют асинхронно по отношению друг к другу и к программам БЦВС, причем быстродействие БЦВМ значительно превышает скорость работы ВА, Поэтому обной из важных функций ИОС БЦВМ является координация различных по скорости прохождения процессов функционирования ВА и процесса реализации функциональных алгоритмов.
Важной задачей организации обмена информацией БЦВМ и ВА является обеспечение максимально возможной независимости функциональных алгоритмов и программ ОС от изменения состава ВА в процессе эксплуатации системы управления. Для упрощения решения этой задачи в основу управления ВА все специфические черты данного ВА концентрируются в драйвере. Все другие компоненты управления ВА выполняют действия, общие для всех ВА. Это обеспечивает минимизацию усилий по подключению новых ВА к БЦВМ.
Одно из главных требований к ИОС - минимизация накладных расходов по её реализации. Поэтому перед разработкой ИОС встаёт компромиссная задача выбора между функциональными возможностями ИОС и допустимыми накладными расходами.
Современные ИОС БЦВМ являются резедентными в отличие от ИОС универсальных ЦВМ, которые размещаются на дисках. Резидентные ИОС полностью размещаются в ОЗУ и тем самым обеспечивают минимальное время расхода БЦВМ на внешние сигналы.
Примерами таких ИОС являются RMX/80 для микроЭВМ на базе МП Intel 8080 и R8XIIS для микроЭВМ LSI. Обе ИОС выполняют следующие функции: распределение времени процессора на основании фиксированных приоритетов задач; синхронизация выполнения задач и передачи сообщений между ними на основе запросов от задач; управление операциями обмена между ОП и ВА; обеспечение языкового интерфейса между пользователем и ИОС. Перечисленные функции являются базисными для организации мультипрограммной работы в РМВ, и поэтому все резидентные ИОС включают их.
Наиболее общим методом, позволяющим одновременно многим задачам иметь доступ к ресурсам МО, является использование реентерабельных (повторно вводимых) программ, что рациональнее, чем создание многочисленных копий МО, потребляющих дефицитные ресурсы памяти.
Использование ТОС подразумевает разработку программ на той же БЦВМ, где впоследствии будут выполняться готовые программы, но расширенной комплектации. В эту комплектацию обязательно входят магнитные записи, на которых хранятся библиотеки разрабатываемых программ, средств автоматизации программирования и большая часть программ самой ТОС.
Особенностями ТОС являются: более высокая степень динамичности распределения ресурсов; широкое использование виртуальной памяти; обеспечение отладки программ в
диалоговом режиме; максимальная автоматизация распределения ресурсов БЦВМ.
 |
Структурная схема БЦВМ
Структурная схема БЦВМ представлена на рис.14,
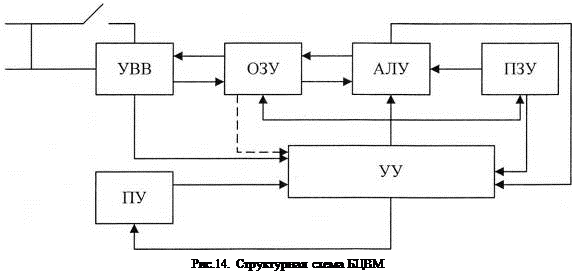 |
На рис.14. УВВ - электрические и электромеханические преобразователи, ОЗУ -часть памяти БЦВМ, используемая для хранения входной и промежуточной информации. ОЗУ
непосредственно взаимодействует с АЛУ. Основной объем памяти - это ПЗУ, которое значительно дешевле ОЗУ.
Основная характеристика ОЗУ - время обращения, которое должно быть меньше времени короткой операции.
ПЗУ - специфическая часть памяти БЦВМ. В процессе функционирования БЦВМ из ПЗУ информация может только считываться. В ПЗУ хранится программа работы БЦВМ и используемые константы.
АЛУ предназначено для выполнения арифметических операций над числами с фиксированной или плавающей запятой. В процессе обработки информации и в режиме с фиксированной запятой, в АЛУ могут вырабатываться два признака:!!!! (φ и ω. Через φ обозначается признак переполнения разрядной сетки (φ = 1). Признак ω- признак передачи управления, может вырабатываться при выполнении арифметических или логических операций. Признак ω (ω = 1) вырабатывается, например, при отрицательных или нулевых значениях результатов операций. Он используется при реализации команд условного перехода.
УВВ служат для связи машины с объектом управления (ОУ). Чаще всего УВВ выполняют функции преобразователей (ЦАП или АЦП) и выполняются в виде многоканальных устройств. Важной характеристикой УВВ является количество входных и выходных величин, подлежащих преобразованию.
Специфика БЦВМ
1. Измеряемые датчиками физические величины - скорость, высота, углы тангажа, скольжения, сноса и т. д. - по своей природе являются непрерывными величинами, вследствие чего для ввода в БЦВМ необходимо преобразование в цифровую форму. С другой стороны все исполнительные устройства работают от непрерывных сигналов. Поэтому дискретные сигналы БЦВМ должны быть преобразованы в аналоговые величины (рис, 15.).
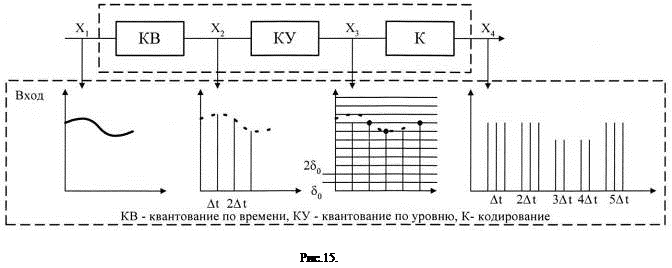
Шаг квантования по времени (KB) ∆t зависит от спектральной характеристики 
входного сигнала и определяется теоремой Котельникова  Согласно этой теории
Согласно этой теории
сигнал f(t) с ограниченным частотным спектром от 0 до f0 (Гц) полностью определяется
последовательностью своих дискретных значений, разделенных интервалом
Шаг квантования по уровню (КУ)  определяет «шумы квантования» и характеризует точность ПНК (рис.16.).
определяет «шумы квантования» и характеризует точность ПНК (рис.16.).
Рис.16.
2. Алгоритмы решаемых задач, описанных на машинном языке, хранятся в ПЗУ и не меняются в процессе всего периода эксплуатации. При каждом повторении алгоритма меняются лишь исходные данные. Частота повторения алгоритмов зависит от скорости изменения исходных данных, допустимой дискретности при выдаче информации (например, СЦВМ РЛС решает задачи с частотой f0б3=1/Т0бз).
Период дискретности (повторения) Тповт является функцией скорости изменения состояния объекта управления:

где tpacчi - время, отводимое на расчет по определенным алгоритмам i - го управляющего воздействия; tпрi - время, необходимое для принятия решения о выдаче i - го управляющего воздействия; to6mi - время обмена.
Надежность обусловлена надежностью элементов и технологией изготовления БЦВМ и надежностью ПО. Она определяется выбором устойчивых алгоритмов решения задач, эффективностью программной защиты алгоритмов и т. д. (-1000 часов на отказ). Условия эксплуатации t=-50°С..+60°С.
Алгоритм счисления
Алгоритм счисления работает в быстром цикле и решает задачу определения текущих ч.о. координат по известным проекциям путевой скорости на оси Ч0 СК.
Для решения указанной задачи в алгоритме используется следующая входная
информация:
1. Проекции путевой скорости на оси ЧО СК Ws и Wz, формируемые в алгоритме
обработки доплеровских частот.
2. Значение текущей широты места самолета φ из алгоритма вычисления
географических координат.
3. Значение высоты полёта Самолета Н из алгоритма контроля высотной информации.
Выходными параметрами алгоритма являются текущие частноортодромические
координаты самолета Si, Zi, хранящиеся в трех ячейках каждая.
Вычисление счисленных координат S и Z осуществляется на сфере радиуса а=6378км. Учет несферичности Земли и высоты полета осуществляется при формировании приращений координат AS и AZ по следующим формулам:

 |

Где , где е - эксцентриситет земного эллипсоида, где
Перед вычислением координат на следующем шаге счисления координаты поступают
на СП «Выбор», где осуществляется мажоритарный контроль с определением неисправного
канала и выравнивание координат по состоянию первой ячейки в случае её исправности.
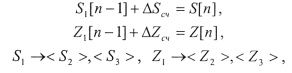
где <S1> и <Z1> - ячейки с двойным числом разрядов.
Алгоритм обработки доплеровских частот
Данный алгоритм предназначен для преобразования получаемых от ДИСС значений доплеровских частот в составляющие путевой скорости самолета на оси частной ортодромии.
В алгоритме решаются следующие задачи.
1. Пересчет доплеровских частот в составляющие путевой скорости на самолетные
оси: 
где С1мк, С2мк, С3мк - масштабные коэффициенты, выбираемые из ПЗУ в соответствии с
входными признаками «суша - море».
4. Преобразование составляющих путевой скорости из самолетной СК в ЧО СК
производится последовательным поворотом самолетной СК на углы крена (γ), тангажа (υ) и
ортодромического
5.
6.
7.
курса (!!!\|/орт) с использованием стандартной программы (СП) поворота:

|

|
3.Поправка на приведенный курс:

где а1, а2 - составляющие путевой скорости на оси ЧО без учета поправки; AF - величина поправки, определяемая по формуле: 
причем коэффициенты С2, С3 определяются величиной запитывающего напряжения и табличной зависимостью.
Входной информацией для данного алгоритма являются:
1. Внешний признак «работа ДИСС», поступающий в ЦВМ от ДИСС.
2. Внешний признак «суша - море», определяющий вид подстилающей поверхности.
3. Три значения доплеровской частоты F1, F2, F3.
4. Значения углов у, !!!о и сопровождающего сигнала «исправность МГВ»,
поступающие в БЦВМ от МГВ.
5. Значение поправки A!!!F , поступающее в БЦВМ в виде напряжения от ДИСС.
6. Значения приведенного курса !!!у/ и заданного путевого угла !!!р, формируемые в
алгоритмах контроля курсовой информации и смены линии заданного пути (ЛЗП) соответственно.
Выходной информацией алгоритма обработки доплеровских частот являются составляющие путевой скорости самолета Ws и Wz на оси ЧОСК
Анализ алгоритмов БЦВМ (БЦБС)
Непрерывное увеличение объема, функциональной насыщенности и сложности задач, возлагаемых на ЛА, требует применения БЦВМ и (или) БЦВС.
Под БЦВС будем понимать совокупность информационно-взаимосвязанных средств цифровой вычислительной техники, функционирующих под управлением единой операционной системы (ОС). БЦВС включает в свой состав:
- средства обработки и хранения информации для решения задач в РМВ, к которым относятся БЦВМ универсальной и специализированной архитектуры;
- средства информационного обмена, обеспечивающие информационное сопряжение функциональных подсистем;
- средства контроля, управления и реконфигурации архитектуры БЦВС;
- бортовое программное обеспечение (ПО), осуществляющее информационно-вычислительный процесс.
БЦВМ универсальной и специализированной архитектуры применяются во всех особо важных бортовых системах: управления полетом и силовой установкой (СУ), центровкой самолета; навигации; электронной индикации; автоматического контроля и регистрации параметров полета.
БЦВМ превращается в объект переработки информации только тогда, когда в её памяти размещены отлаженные программы реализуемых алгоритмов. Программы современных БЦВМ достигают нескольких тысяч слов. В связи с этим проблема создания ПО представляет собой сложную задачу. Затраты на создание ПО сейчас превышают затраты на разработку аппаратуры.
Процесс создания ПО содержит несколько последовательных этапов, Первый из них -анализ алгоритмов, подлежащих программированию в БЦВМ. Цель анализа - выработка исходных данных для определения характеристик БЦВМ.
Основные характеристики алгоритмов БЦВМ (БЦВС) подразделяются на машинно-независимые (МН) и машинно-зависимые (МЗ).
Характеристики алгоритмов БЦВМ (БЦВС)
Характеристики алгоритмов БЦВС: МН - машинно-независимые, отражающие абстрактную (математическую) природу алгоритмов и не зависящие от особенностей технических средств их реализации; МЗ - машинно-зависимые, отражающие параметры алгоритмов, зависимые от методов и средств их технической реализации в БЦВС.
Характеристики алгоритмов БЦВС: информационные, операционные, точностные и системные.
Информационные характеристики определяют объем памяти (оперативной и долговременной), в которой размещаются исходные данные, программы и массивы выходной информации.
Операционные характеристики определяют длительность выполнения программ.
Точностные характеристики определяют качество решения задач.
Системные характеристики алгоритмов определяют параметры взаимодействия процессов и частных алгоритмов.
МН информационные характеристики:Lи - информационная длина алгоритма, то есть длина его записи в памяти вычислителя;
!!!1ц\ 4ю - распределение элементов алгоритма (ЭА) различных видов по
информационной длине (оператор, операция); nвх - количество входных величин; nВых - количество выходных величин; nк - количество констант.
МЗ информационные характеристики: Ми - информационная длина программы;
!!!т{ц\ т{*\ - распределение элементов машинного алгоритма по информационной
длине программы;
VH - требуемый объем ЗУ для хранения программ.
За единицу измерения информационной длины программы принимается команда или микрокоманда. За единицу измерения объема ЗУ принимается машинное слово, байт, бит.
Операционные характеристики: L0 - операционная длина;
!!!!/*°, 1{о2), ..., 1{оп) - распределение ЭА различных видов по операционной длине;
!!!!PqX)•> Р0[1]•> Р0{п) " распределение процессов полного алгоритма, допускающих
независимую реализацию по временным интервалам.
nпром - количество промежуточных величин;
Pij - матрица переходных вероятностей, элементы которой Рij определяют вероятности выполнения j - ой операции после операции i. Точностные характеристики:
!!!!Луь §!!!yi - максимальные абсолютные и относительные погрешности выходных и промежуточных величин;
ni - количество достоверных двоичных разрядов, необходимых для представления входных, промежуточных и выходных величин.
МН системные характеристики алгоритмов определяют параметры взаимодействия процессов и частных алгоритмов (ЧА) в различных режимах реализации полного алгоритма:
- распределение ЧА по дискретности их реализации;
- распределение промежуточных величин полного алгоритма по процессам (под процессом полного алгоритма понимается функционально законченный набор ЧА, выполняемых в определенном временном интервале для заданного режима работы БЦВС),
МЗ системные характеристики:
- распределение ЧМА по уровням их иерархии;
- распределение прерываний по уровням прерывания;
- объем ЗУ, требуемый для организации обмена между процессами и ЧМА;
- время, требуемое для организации обмена между процессами и ЧМА.
Для алгоритмов авиационных комплексов навигации и управления, реализуемых в БЦВМ, имеют место следующие характеристики:
- информационная длина Lи — 1000.. 100000 операций;
- операционная длина L0 = 500 - 25000 операций;
- число входных величин nBX = 15 - 400;
- число выходных величин пВЫх = 5 - 150;
- число промежуточных величин nпром = 10 - 500;
- число констант nк = 20-500.
При этом усредненное распределение операции по информационным и операционным длинам имеет вид, представленный в таблице 1.
| Способы определения характеристик алгоритмов 1. Для несложных алгоритмов характеристики могут быть определены путем пробного программирования (в кодах). Этот способ трудоемок. |
| 3. Способ использования языков низкого уровня (ЯНУ) - ассемблеров. Он имеет более высокую точность, но трудоемок. Точностной анализ. Определение точностных характеристик 1. Прямой способ. Основан на сравнении результатов счета одного и того же алгоритма на двух различных по точности ЦВМ, одна из которых имеет большую разрядность, чем БЦВМ. При этом БЦВМ на ранних стадиях проектирования может быть |
Таблица 1
| Операции | Количество операций, % | |
| по Lи | по L0 | |
| Арифметические | ||
| Элементарные функции | ||
| Логические | ||
| Пересылки | ||
| Управления |
2. Способ использования языков высокого уровня (ЯВУ). Этот способ допускает применение автоматизированных методов вычисления информационных и операционных характеристик, однако вследствие того, что исследованию подвергается программа, оттранслированная во внутренний язык БЦВМ, этому способу присущи недостатки:
- результаты оценки носят приближенный характер за счет увеличения объема программ при их трансляции с алгоритмических языков;
- результаты оценки зависят также от системы команд, адресности, архитектуры БЦВМ;
- способ требует дополнительных затрат времени на отладку программ на алгоритмическом языке.
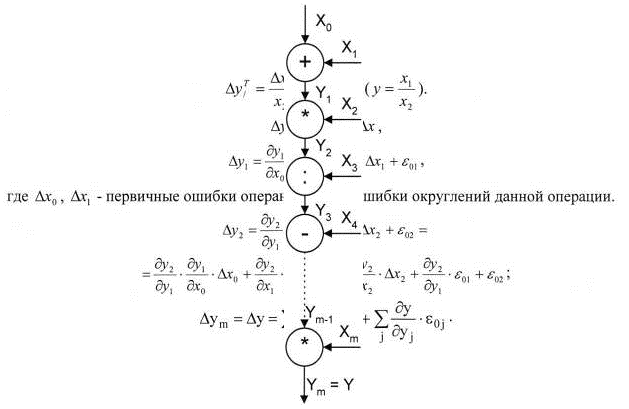 |  | ||
Рис.18
Если некоторая величина задана с максимальной абсолютной погрешностью !!!Ду, то оптимальным, с точки зрения минимума дисперсии шума квантования по уровню, будет такое цифровое представление этой величины, при котором цена младшего разряда представления Р связана с погрешностью !!Ду следующим соотношением:

где Р - цена младшего разряда.
Это соотношение используется при проведении точностного анализа, где для определения цены младшего разряда представления промежуточной величины Р в качестве !!!Ду принимается вычисленная трансформируемая погрешность этой величины !!!Аут. Зная
цену младшего разряда Р, можно определить необходимое количество и двоичных разрядов для представления каждой промежуточной величины по следующей формуле:
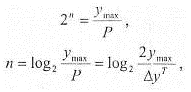 |
где ymax - максимальное значение промежуточной величины.
В этом случае погрешность округления, получающаяся за счет отбрасывания всех, кроме n, разрядов может быть оценена следующим образом:
| за пределами выбранных n разрядов; |

|
- часть величины у, для изображения которой требуются разряды справа
целая часть числа у в единицах цены младшего
разряда.
Это основные выражения для подсчета трансформируемых погрешностей при построении специальной программы точностного анализа на инструментальной ЭВМ. Программа последовательно выбирает команды исследуемого алгоритма, интерпретирует выполнение операций, вычисляет трансформируемую погрешность результата, определяет требуемое число двоичных разрядов n и собирает статистические данные для построения функции плотности распределения величины Р(n).
Если у = ехр(х), то трансформируемая погрешность определяется как
Отсюда следует, что с увеличением значения аргумента растет погрешность значения функции.
Методы анализа вычислительных погрещностей - детерминированные и статистические.
При детерминированных методах анализа ошибки представляются предельными значениями, и предполагается, что они действуют в одну сторону. В результате получаются завышенные оценки.
Статистические методы базируются на том, что округление - случайный процесс, а ошибки округления - случайные величины.
Виды ошибок, возникающих при обработке на БЦВМ.
1. Информационные ошибки. Они определяются погрешностями исходной
информации, поступающей в БЦВМ.
1.1. Ошибки измерения. Порождаются инструментальными и методическими
погрешностями датчиков информации.
1.2. Ошибки преобразования, включающие погрешности квантования но времени и
по уровню, а также инструментальные погрешности преобразователей «А-К» и «К-А».
2. Алгоритмические ошибки. Определяются ограничениями используемых
функциональных методов и технических средств.
2.1. Методические ошибки (численные методы разложения в ряд, интегрирования).
2.2. Вычислительные ошибки.
2.2.1. Трансформируемые ошибки. Порождаются погрешностями задания исходных данных, трансформируются в результирующую ошибку вычисления.
2.2.2. Ошибки округления.
2.2.3. Динамические ошибки.
Предметом точностного анализа является исследование трансформируемых и инструментальных (округления), вычислительных ошибок. Среднеквадратическое отклонение (СКО):

где <!!!!тм, аТР, <ти, ад - методическая, трансформируемая, инструментальная (округления) и динамическая погрешности.
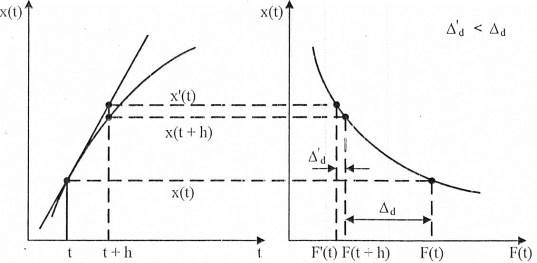
Рис.19.
Результат F(t), полученный к моменту вычисления t + h, соответст
| <== предыдущая лекция | | | следующая лекция ==> |
| Кольцо многочленов с матричными коэффициентами. | | | Введение в Новейшую историю стран Европы и Америки. |
Дата добавления: 2016-07-27; просмотров: 5874;
Поиск по сайту
Узнать еще
- A. Линейный алгоритм
- Автоматическая локомотивная сигнализации и ее виды. Общий принцип работы АЛС с использованием рельсовых цепей
- Алгоритм 2 (метода подбора)
- АЛГОРИТМ 5 Подсчет критерия Н Крускала-Уоллиса
- Алгоритм «Марширующие кубы»
- Алгоритм архитектурного проектирования общественных зданий
- Алгоритм Боуера и Мура
- Алгоритм Брезенхема для генерации окружности.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
