Изучение принципов построения и алгоритмов работы напольного оборудования МСКПС
Комплекс технических средств многофункциольный (КТСМ) КТСМ-02 является системой автоматического контроля технического состояния (диагностики) подвижного состава, состоящей из подсистем обнаружения неисправностей буксовых узлов, колесных пар, тормозного и автосцепного оборудования, волочащихся деталей, нарушения габарита и др.
При этом часть подсистем сопрягаются с базовой на низовом схемно- конструктивном (физическом) уровне, а часть — на информационном уровне с использованием модулей расширения и стандартных стыков, в том числе по сети передачи данных (СПД ЛП) на уровне автоматизированных рабочих мест оператора линейного (АРМ ЛПК) и центрального поста контроля (ЦПК).
Комплекс КТСМ-02 состоит из постового, перегонного и напольного (рис. 10.1) оборудования, соединенного каналами связи с АРМ ЛПК и по сети СПД ЛП с АРМ ЦПК железной дороги или региона.
К напольному оборудованию относят:
— основные напольные камеры (KJIO и КПО);
— вспомогательные напольные камеры (КЛВ и КПВ);
— рельсовая цепь наложения (электронная педаль) ЭП-1 или ЭП-1А;
— датчики прохода колес (Д1, Д2, ДЗ и Д4);
— устройство контроля нижнего габарита (УКНГ);
— комплект кабелей.
На линейных пунктах контроля КТСМ-02 комплектуется подсистемами контроля буксовых узлов (ПКСБ) и заторможенных колес (ПКСТ), а при отсутствии УКСПС — подсистемой контроля волочащихся деталей (СКВП) или подсистемой контроля нижнего габарита (СКНГ) (рис. 10.2).
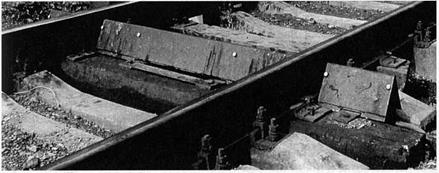 |
Рис. 10.2. Напольный датчик подсистемы СКВП-02
Обнаружение заторможенных колес может осуществляется как по тепловым сигналам от основных напольных камер ПКСБ, так и по тепловым сигналам от вспомогательных напольных камер.
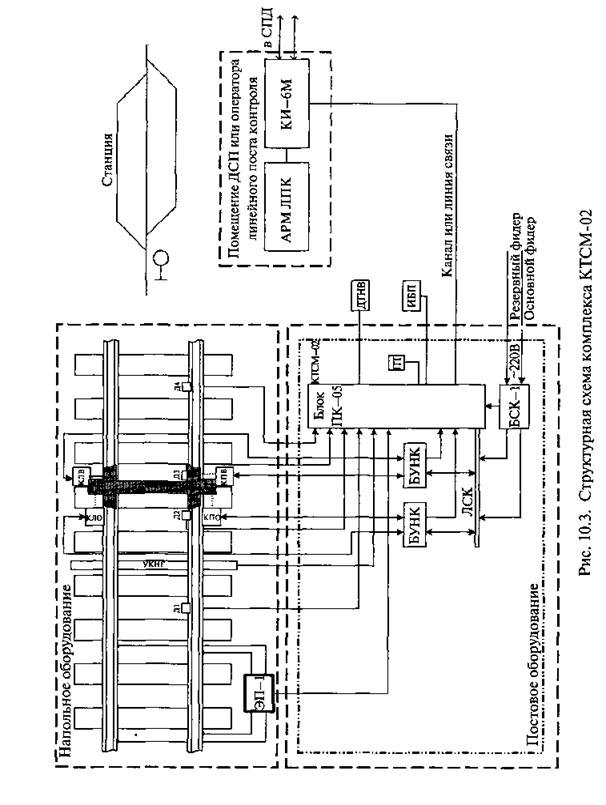
На рис. 10.3 показаны:
— ЭП-1 — рельсовая цепь наложения (электронная педаль);
— Д1-Д4 — датчики прохода колес;
— УКНГ — устройство контроля нижнего габарита;
— КПО — основная напольная камера, правая;
— KJIO — основная напольная камера, левая;
— КПВ — вспомогательная напольная камера, правая;
— KJIB — вспомогательная напольная камера, левая;
— БУНК — блок управления напольными камерами;
— Блок ПК-05 — периферийный контроллер ПК-05;
— БСК-1 — блок силовой коммутации;
— ПТ — пульт технологический;
— ДТНВ — датчик температуры наружного воздуха;
— ИБП — источник бесперебойного питания;
— АРМ ЛПК — автоматизированное рабочее место оператора линейного поста контроля;
— КИ-6М — концентратор информации;
— СПД — сеть передачи данных.
Комплекс КТСМ-02 обеспечивает обнаружение подвижных единиц на участке контроля длиной до 30 м в трех базовых зонах длиной:
— 3100мм — первая зона между датчиками Д1-Д2;
— 500мм — вторая зона между датчиками Д2-ДЗ;
— 3190 мм — третья зона между датчиками ДЗ-Д4.
Датчики прохода осей Д1, Д2, ДЗ и Д4 вырабатывают сигналы прохода колесных пар в определенных точках участка контроля. По сигналам от датчиков прохода осей ПК осуществляет счет осей и подвижных единиц в контролируемом поезде, определяет тип подвижных единиц, а также управляет работой приемоусилительных трактов.
Всего (включая базовые зоны) на участке контроля может быть организовано до 7 зон контроля (до 8 датчиков прохода осей). Расположение и длина зон устанавливается в соответствии с требованиями размещения напольного оборудования подсистем контроля, подключаемых к комплексу.
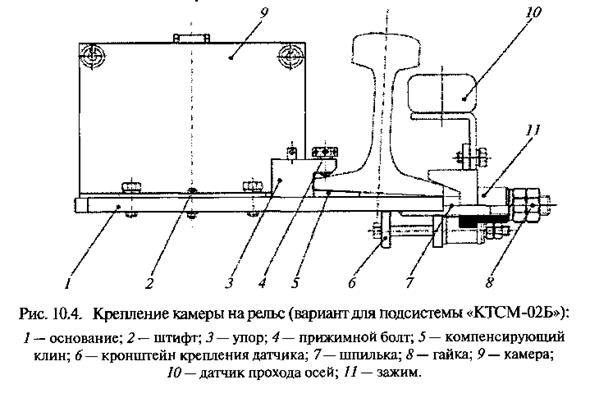
Подсистема контроля состояния буксовых узлов и заторможенных колес КТСМ-02 снабжена малогабаритными напольными камерами КНМ-05 оригинальной конструкции с креплением за подошву рельса (рис. 10.4). Корпус камеры КНМ-05 крепится к основанию камеры четырьмя болтами М12 (размер шестигранника «под ключ» — 19 мм) с использованием стопорной шайбы.
Функциональные возможности этих напольных камер существенно отличаются от применяемых ранее за счет (рис. 10.5):
— использования нетрадиционного угла ориентации на буксу приемника инфракрасного (ИК) излучения — параллельно оси пути под углом 55 градусов к горизонту, что снижает влияние внешней среды и солнечного излучения;
— преобразования мощности ИК-излучения буксы (колеса) в цифровой сигнал непосредственно в приемной капсуле напольных камер, что позволяет повысить помехозащищенность системы и удалять постовое перегонное оборудование от напольного на расстояние до 30 м;
— реализации функций автоконтроля и коррекции коэффициента преобразования тепловых сигналов в приемно-усилительных трактах;
— существенного снижения эксплуатационных расходов в связи с исключением операций по ориентации камеры в процессе эксплуатации;
— снижения в два раза массы, габаритных размеров, мощности, потребляемой системой термостатирования, простоты монтажа (демонтажа), что важно при выполнении работ по текущему ремонту пути;
— обеспечения возможности обнаружения заторможенных колесных пар без вспомогательных напольных камер.

Подробная работа электронной педали ЭП-1 описана в [4].
При широком внедрении автоблокировки с тональными рельсовыми цепями системы АБТ(Ц) было установлено, что при совпадении неблагоприятных факторов РЦ наложения с ЭП1, применяемые в системах КТСМ (ДИСК), оказывают мешающие воздействия на работу РЦ тональной частоты (4,5—5,5) кГц и испытывают шунтирующее воздействие входных сопротивлений питающих (ПК) и релейных (РК) концов РЦ тональной частоты системы АБТ(Ц) (рис. 10.6).
Взаимное влияние РЦ наложения КТСМ (ДИСК) с ЭП-1 и основной РЦ на аппаратуре ТРЦЗ практически отсутствуют при:
— удалении места подключения РЦ наложения свыше 400 м от совмещенного РК ТРЦЗ-ТРЦ4 и свыше 60 м от точки подключения питающего конца ПК ТРЦЗ;
— удалении точки подключения РЦ наложения свыше 60 м от РК ТРЦЗ (изолирующий стык или совмещенный ТРЦЗ-ТРЦЗ).
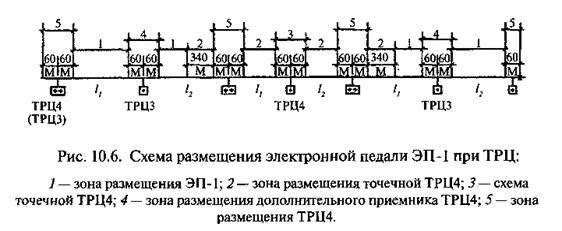
В зоне менее 400 м до совмещенного конца ТРЦЗ-ТРЦ4 основной РЦ на аппаратуре ТРЦЗ и зоне основной ТРЦ4 применение РЦ наложения на ЭП-1 исключено, так как частотный диапазон ЭП-1 (4—6) кГц с учетом температуры перекрывает рабочие частоты ТРЦ4, что может привести к отказам основной РЦ.
В зоне до 60 м от ПК и РК ТРЦЗ применение РЦ наложения на ЭП-1 исключено из-за шунтирующего воздействия входных сопротивлений указанных концов на работу РЦ наложения.
Для организации РЦ наложения в зоне РК ТРЦЗ-ТРЦ4 используется частота и
модуляция отличные от основной ТРЦ4.
Для проверки работы напольных камер и трактов тепловых сигналов применяются режимы имитации прохода поезда, включение которых возможно как дистанционно (с АРМа ЛПК), так и по командам, введенным с клавиатуры пульта ПТ с целью комплексной проверки работоспособности комплекса.
Периферийный контроллер ПК-05 предназначен для использования в составе комплекса технических средств многофункционального КТСМ-02 и обеспечивает:
— ввод и обработку сигналов от путевых датчиков;
— информационный обмен и координацию работы подсистем контроля, работающих в составе комплекса;
— информационное взаимодействие комплекса в целом через систему передачи данных с централизованными средствами регистрации, сигнализации, отображения и накопления результатов контроля.
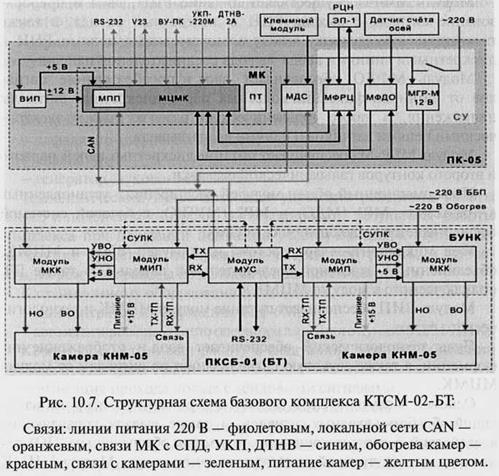
В состав ПК-05 и блока БУНК входят модули (рис. 10.7):
— модуль ВИП — вторичный источник электропитания;
— модуль МЦМК — модуль центрального микроконтроллера;
— модуль МДС — (модуль расширения МР1);
— модуль МУПК (модуль расширения МР2);
— модуль гальванической развязки МГР-М;
— модуль формирователей датчиков осей МФДО;
— модуль формирователя рельсовой цепи МФРЦ;
— модуль источник питания МИП;
— модуль управления и связи МУС;
— субмодуль процессора и памяти блока БУНК-МПП;
— силовой модуль коммутации и контроля МКК;
— модуль ПТ — пульт технологический.
Дата добавления: 2020-10-25; просмотров: 2304;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. Изучение нового материала.
- II раздел. Организация работы логопеда в группе для детей с ОНР
- IV. Выполнение работы
- IV. Выполнение работы
- IV. Выполнение работы
- IV. Выполнение работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
