собственных векторов
Нахождение собственных значений путем решения характеристического полинома можно назвать прямым способом. Существуют и итерационные способы, например, для положительно определенной симметрической матрицы, часто встречающейся в практических приложениях, известен итерационный способ одновременного нахождения собственных значений и собственных векторов.
Напомним свойства положительно определенной симметрической матрицы:
1) все собственные числа действительны и положительны;
2) собственные векторы образуют систему ортогональных полиномов, то есть
 при j ¹ k . (4.22)
при j ¹ k . (4.22)
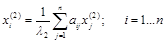
Рассмотрим систему линейных уравнений (4.18). Для определения собственных векторов x(i), соответствующих всему спектру собственных значений {li}, имеем n систем уравнений:
Ах(1)=l1х(1); Ах(2)=l2х(2); …, Ах(n)=lnх(n), (4.23)
каждая из которых представляет собой систему n нелинейных уравнений с n+1 неизвестным.
Преобразуем первую систему из этого списка (запишем справа налево и поделим на l1):
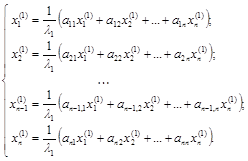
Теперь воспользуемся тем обстоятельством, что при умножении (делении) собственного вектора на скаляр он остается собственным вектором той же матрицы, то есть он определяется с точностью до коэффициента пропорциональности. Отсюда практический вывод: собственный вектор можно нормировать, например, поделив на максимальный элемент. Таким образом, можно всегда положить одну из координат собственного вектора равной единице. Пусть хn(1) = 1.
Для решения получившейся системы n нелинейных уравнений с n неизвестными можно использовать, например, метод простой итерации.
Итерационный процесс будет иметь вид:
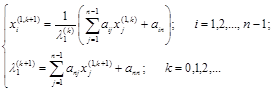
Задаем начальные приближения  и
и  и с заданной степенью точности находим первое собственное значение l1 и первый собственный вектор х(1).
и с заданной степенью точности находим первое собственное значение l1 и первый собственный вектор х(1).
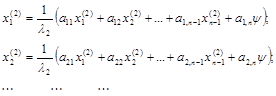
Для нахождения второго собственного значения l2 и второго собственного вектора х(2) запишем вторую систему из списка (4.23):
 (4.24)
(4.24)
и воспользуемся условием ортогональности (4.22), записав его для векторов х(1) и х(2):
 .
.
Выразим отсюда одно из неизвестных, например,  :
:

и, подставляя его в (4.24), получаем

Полагая  решаем эту систему методом простой итерации и получаем второе собственное значение l2 и второй собственный вектор
решаем эту систему методом простой итерации и получаем второе собственное значение l2 и второй собственный вектор
 .
.
Для нахождения третьего собственного значения l3 и второго собственного вектора  записываем два соотношения ортогональности:
записываем два соотношения ортогональности:
 , из которого выражаем
, из которого выражаем  , и
, и
 , из которого выражаем
, из которого выражаем  .
.
Добавляя условие нормализации  , решаем третью систему уравнений из списка (4.23). И так далее.
, решаем третью систему уравнений из списка (4.23). И так далее.
Так как собственные векторы определяются с точностью до коэффициентов пропорциональности, то решение будет выглядеть следующим образом:
| l1 | 
| 
| … | 
| 
|
| l2 | 
| 
| … | 
| 
|
| l3 | 
| 
| … | 
| 
|
| … | … | … | … | … | … |
| ln | 
| 
| … | 
| 
|
[1] Так как условие ||B||<1 – достаточное условие сходимости, то практически можно поступить следующим образом. После преобразования программируем итерационную схему и проводим вычисление. Если процесс сходится – решение найдено, если нет – проводим другое преобразование.
[2] Например, для квадратного уравнения l2+р1l+р2=0, используя теорему Виета, получаем формулу Ньютона при k=1: S1= l1+l2 =-p1 Далее, рассмотрим S2=l12+l22= =(l1+l2)2-2l1l2 =(-p1)(-p1)-2p2 . Заменяя –p1=l1+l2 =S1, получаем формулу Ньютона при k=2 : S2+p1S1=-2p2.
[3] Англ. trace – след, или нем. Spur - след
Дата добавления: 2020-10-25; просмотров: 141;
Поиск по сайту
Узнать еще
- Векторное произведение двух векторов.
- Векторное произведение двух векторов.
- Векторное умножение свободных векторов
- Внутреннее, или скалярное произведение векторов
- Вопрос 2. Влияние размера собственных средств на финансовую устойчивость страховой компании.
- Выражение смешанного произведения через координаты векторов
- Вычисление несобственных интегралов по действительной оси
- Гарантии демократии – эти те средства и условия, которые должны предотвратить использование власти должностными лицам в их собственных интересах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
