Торможение ДПТ. Механические характеристики ДПТ в тормозных режимах.
В зависимости от требований, предъявляемых к технологическим процессам, и ЭП
- необходимость максимально быстрой остановки;
- просто быстрой остановки;
- остановка может быть медленной.
Используются различные способы торможения двигателя НВ.
Если привод работает в продолжительном режиме с редкими включениями и отключениями двигателя, то тогда требования к длительности процесса остановки двигателя не высоки. В этих случаях обычно используют естественное (самоторможение), когда двигатель просто отключается от источника питания, М = 0 и двигатель останавливается под действием МС.
В тех случаях, когда требования к остановке высокие используются искусственные способы торможения. При этом различают:
1) механические способы торможения – различные фрикционные элементы, муфты, накладки и т.д.
2) электрическое торможение.
Сущность электрических способов торможения заключается в том, что электромагнитный момент двигателя становится противоположным по направлению и скорости вращения, а именно тормозным и при этом двигатель замедляется под действием суммы моментов (тормозного и статического момента сопротивления). При этом в любом случае двигатель переходит в режим генератора, при котором кинетическая энергия вращательного движения преобразуется в электрическую, которая может возвращаться в питающую сеть или преобразоваться в тепловую.
Существует 3 вида тормозных режимов:
А. Динамическое торможение
Б. Рекуперативное торможение
В. Торможение противовключением.
А. При нем якорная цепь двигателя отключается от питающей цепи и замыкается на тормозное (балластное) сопротивление.
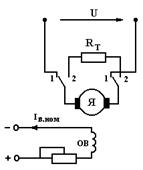
1 – рабочее положение
2 – тормозной режим
Уравнение механической характеристики двигателя в двигательном режиме имеет следующий вид:

где Е = кФω ном
Если мы отключим двигатель от источника питания и переключим в режим 2, то U = 0; R = RЯ + RT; при этом ток в первое мгновение не изменится
ω = const = ω ном; ток изменит свое направление
Минус в числителе т.к. генераторный режим. Т.к. магнитный поток при этом не изменяется  - тормозной момент
- тормозной момент
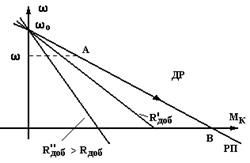
Под действием отрицательного (тормозного) электромагнитного момента, а также статического момента сопротивления двигатель начинает замедляться. При этом уравнение механической характеристики имеет следующий вид:
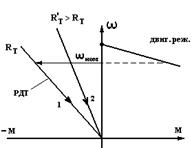
по 1 характеристике остановка происходит быстрее, чем по второй. Если уравнение энергетического баланса в двигательном режиме имело вид:
UI = EI + RI2 ,
где EI – электромагнитная мощность
RI2 – мощность рассеяния.
то в режиме торможения EI = RI2
Рис. 2. Ест. характеристика и сем-во реостатных мех. характеристик ДПТ НВ
В случае динамического торможения двигатель работает в генераторном режиме, при котором кинетическая энергия вращательного движения EI преобразуется в электрическую мощность рассеяния, которая выражается в виде тепла RI2.
(+) а) возможность полной остановки двигателя
б) точность (при ω = 0; М = 0)
(-) а) неэкономичность
б) ограниченное использование для двигателя параллельного
возбуждения, т.к. при отключении питающего напряжения
магнитный поток возбуждения резко уменьшается.
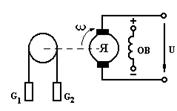
Б. ДПТ НВ связан со шкивом, на котором подвешено 2 груза G1 и G2
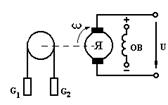 Двигатель работает в режиме подъема груза: МС = G1 - G2
Двигатель работает в режиме подъема груза: МС = G1 - G2
Если начнем увеличивать G2, то МС ↓ → ω↑.
При некотором значении G1 = G2, МС = 0, ω = ω0, I = 0, M = 0.
Если мы будем дальше увеличивать G2 , то угловая скорость станет больше ω0, то э.д.с.
E = kФω
U = kФω0 |E| > |U| => I = (U – E)/R < 0, т.е. изменяет своё направление.
При этом двигатель начинает работать в режиме генератора с отдачей энергии в цепь источника питания, а вращающий момент М = кФI изменяет свой знак и становится тормозным.
При этом уравнение механической характеристики примет вид:

т.е. механическая характеристика, которая соответствует рекуперативному режиму, будет являться продолжением механической характеристики в двигательном режиме и располагается во 2 квадранте. Т.о. рекуперативный режим является наиболее экономичным.
Уравнение энергетического баланса:
ЕI = UI + RI2
т.е. большая часть кинетической энергии вращательного движения EI возвращается в питающую сеть в виде электрической мощности UI и меньшая часть выделяется в виде тепла RI2 в цепи якоря.
Основными плюсами рекуперативного способа торможения является его экономичность, однако существенным минусом является ограниченность его использования.
Как правило, рекуперативный режим используется для обеспечения плавности в процессе спуска груза или же при ступенчатом снижении питающего напряжения.
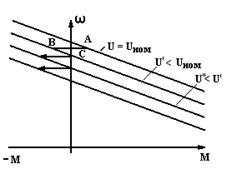 U = U’ < UНОМ ω = const = ωв перв.мом. вращ
U = U’ < UНОМ ω = const = ωв перв.мом. вращ
U’<E I(-); M(-). Характеристика переходит в т.В, становится отрицательной. Двигатель замедляется в рекуперативном режиме до т.С, затем замедляется по двигательной характеристике.
Для того, чтобы двигатель не выходил из рекуперативного режима, мы должны постоянно снижать напряжение поддерживая соотношение |U| < E.
Основной минус рекуперативного торможения – ограниченность его использования и сложность реализации полной остановки двигателя в рекуперативных режимах.
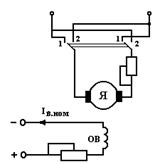
 В.
В.
 МС = G1 - G2
МС = G1 - G2
G1 ↑ → МС ↑ → ω↓. E = kФω
При этом ,  ↑ → М ↑ (M =kФI).
↑ → М ↑ (M =kФI).
При некотором значении М = МК в т.В ω = 0. Если дальше увеличивать G1, то направление вращения вала двигателя изменится на противоположное и при этом положительный момент будет направлен против направления вращения двигателя, т.к. относительно этого направления окажется тормозным.
При этом ток в цепи якоря: 
I резко возрастает и при этом значительно усиливается нагрев обмотки двигателя.
Энергетический баланс будет иметь вид: UI + EI = RI2
Т.о. в режиме противовключения электрическая энергия, потребляемая из сети UI + кинетическая энергия вращательного движения EI преобразуются в тепловую энергию RI2. Если при этом учитывать, что ток в режиме противовключения значительно превосходит ток двигательного режима, режим противовключения является весьма тяжелым для двигателя с точки зрения термодинамики. Поэтому этот режим обычно сопровождается включением в цепь якоря добавочного сопротивления ограничивающего ток.
Практически режим противовключения используется так же, как и рекуперативное, для обеспечения плавности спуска груза и используется при необходимости быстрой остановки двигателя и реализуется за счет изменения полярности напряжения, подводимого к цепи якоря.
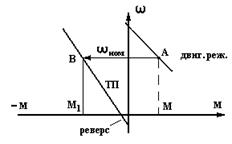
Работал в т. А с постоянной ω. Если контакты переведем из 1 в 2 → изменится U питания. При этом  изменит направление и увеличится по модулю, поэтому для ограничения тока в момент переключения вводят добавочное сопротивление в цепь якоря.
изменит направление и увеличится по модулю, поэтому для ограничения тока в момент переключения вводят добавочное сопротивление в цепь якоря.
Вращающий момент М = kФI становится отрицательным и равным тормозному. Угловая скорость в первый момент не изменится. При этом под действием этого момента двигатель начинает тормозится с выделением большого количества тепла до тех пор, пока скорость вращения не станет = 0. Если двигатель не отключать от питающей сети то он реверсируется.
(+) а) простота реализации
б) возможность очень быстрой остановки двигателя
в) возможность его реверсирования
(-) а) большой перегрев
б) неэкономичность
в) наличие в момент переключения динамического удара.
Поэтому при торможении противовключением включают добавочное сопротивление. При этом уменьшается нагрев двигателя и ослабляется динамический удар.
Для двигателя большой мощности этот вид торможения неприемлем вообще.
Для ДПТ параллельного возбуждения торможение противовключением по данной схеме невозможно, т.к. меняется направление тока и магнитного потока.
Дата добавления: 2016-07-22; просмотров: 6097;
Поиск по сайту
Узнать еще
- II. Физические характеристики участников коммуникации
- III. Компаудный ДПТ (Смешанное возбуждение)
- U – образные и рабочие характеристики синхронного двигателя
- U – образные характеристики синхронного генератора
- U-образные характеристики
- XIII. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ
- АДПТАЦИЯ, ЕЕ ВИДЫ И ПЕРИОДЫ
- Амплитудо-частотная и фазо - частотная характеристики усилителя .

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
