Кинематика двух поводковой группы первого вида
Рассмотрим механизм в состав, которого входит двухповодковая группа 1-го вида:

| звенья | кинематические пары |
| 1 – кривошип 2 – ползун 3 – коромысло 4 – стойка | КП 1: 4 – 1 НКП – вращат., P1 КП 2: 1 – 2 НКП – вращат., P1 КП 3: 2 – 3 НКП – вращат., P1 КП 4: 3 – 4 НКП – вращат., P1 | |
| n=4 | P1=4, P2=0 | |
| Расчет числа степеней свободы: Wф = 1 –фактическая степень свободы Wч = 3 (n – 1) – 2P1 – 1P2 = 9-8=1 |
Расчет метрических связей:
q м = Wф – Wч
q м = 1-1=0→ метрических связей нет
Структурный анализ:
Н. М.: 4 – 1 ХТ(О, А1)
 |


|
 ,
, 
Построение плана скоростей
Векторные уравнения:

Построение плана ускорений
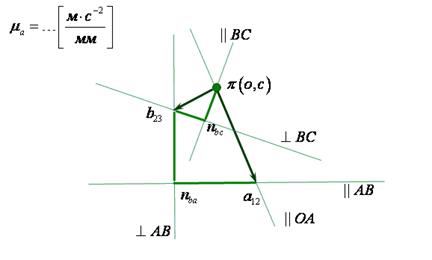
Кинематика 2- поводковых групп 2го и 3го вида
I этап:
| Wч = 1Н.М. : 6,1 (О; А)
С3 – ищется по теореме подобия
 2ая 2ПГ → 4, 5 → 2 вида (С4 = С3; D4 = D5; D6) 2ая 2ПГ → 4, 5 → 2 вида (С4 = С3; D4 = D5; D6)
|



 Возможные поводки: 3, 5, 2.
Возможные поводки: 3, 5, 2.
II этап:
(построение плана скоростей)
План скоростей– плоская фигура, на которой изображены все скорости механизма.
 ,
,  ,
,  .
.  ,
,  .
.
|   , ,  ; ;
  ω3 = ?
ω3 = ?

|
III этап:
(план ускорений)




Кинематику 2ПГ 4-го и 5-го вида на самостоятельное обучение (Гущин В.Г., Бабич М.А. Кинематическое исследование механизмов машин)
Дата добавления: 2020-10-01; просмотров: 730;
Поиск по сайту
Узнать еще
- DC-AC преобразователи. Двухактный инвертор.
- I2C (Inter-Integrated Circuit) или двухпроводный интерфейс
- II.Группы маркетинга в зависимости от широты охвата рынка.
- XI. Горение двух струй газа
- А - гравийное покрытие серповидного профиля; б - однопутное бетонное сборное колейное покрытие; в - то же, двухпутное
- А – двухстороннее; б – одностороннее
- А) Граничные условия первого рода
- А, б) - двухстороннее и одностороннее в насыпях; в, г) - двухстороннее и одностороннее в выемках

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
