Самолеты вертикального (укороченного) взлета и посадки
Самолеты вертикального взлета и посадки, летающие на крейсерских (горизонтальных) режимах полета как обычные самолеты, способны, как вертолеты, висеть в воздухе, а также взлетать и садиться вертикально. Для обеспечения режимов ВВП (вертикального взлета и посадки) на таком самолете необходимо иметь специальную силовую установку, обеспечивающую создание подъемной силы, превышающей вес самолета.
Стартовая вертикальная тяговооруженность (отношение подъемной силы, создаваемой двигателями, к весу самолета) современных СВВП находится в пределах 1,05-1,45.
В зависимости от того, каким образом создается подъемная сила на режимах ВВП и сила тяги на маршевых (крейсерских) режимах, можно провести классификацию СВВП (рис. 7.69).
Единая силовая установка (СУ) имеет в своем составе один или несколько подъемно-маршевых двигателей, которые на режимах ВВП создают вертикальную тягу, а на обычных режимах - маршевую тягу. Тяга создается либо воздушным винтом, либо струей газов реактивного двигателя. Изменение направления вектора тяги подъемно-маршевых двигателей может быть конструктивно обеспечено либо поворотом всего двигателя в нужном направлении, например относительно крыла или вместе с крылом, на котором они закреплены, либо за счет изменения направления струи (и вектора тяги) реактивного двигателя.
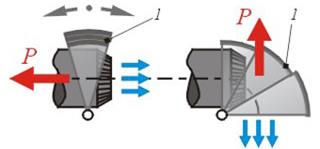
Принципиальная схема одного из возможных устройств, обеспечивающих изменение направления вектора тяги P с помощью скользящего козырька 1, проиллюстрирована рис. 7.70.
Составная СУ включает в себя две группы двигателей: одна из них - для создания вертикальной тяги на режимах ВВП (подъемные двигатели), другая - для создания маршевой тяги (маршевые двигатели).
Комбинированная СУ также состоит из двух групп двигателей:подъемно-разгонных иподъемно-маршевых, которые (в большей или меньшей мере) участвуют в создании и вертикальной и маршевой тяги.

|
| Рис. 7.69. Классификация СВВП по типу силовой установки |
|
| Рис. 7.70. Выхлопное устройство подъемного двигателя со скользящим козырьком |
Выбор типа силовой установки существенным образом влияет на возможность решения специфических проблем, возникающих при проектировании СВВП, и определяет фактически его концепцию, аэродинамическую и конструктивно-силовую компоновку.
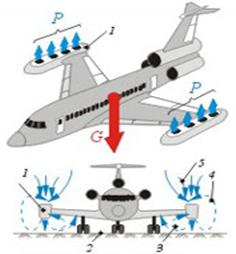
Двигатели 1 (рис. 7.71) создают подъемную силу (P=G/2), уравновешивающую силу тяжести G самолета. На режимах работы вблизи экрана 2 (поверхности ВПП) струи двигателей 3 создают вокруг самолета сложные течения, обусловленные взаимодействием отраженных от экрана газовых струй 4 с воздушными потоками 5, текущими в воздухозаборники двигателей. Форма и интенсивность этих течений на
|
| Рис. 7.71. СВВП с составной силовой установкой и газовоздушные потоки вблизи экрана |
режимах висения вблизи экрана, взаимодействие этих течений с набегающим потоком на режимах ВВП и переходных режимах(от вертикального к горизонтальному движению) зависят от мощности, количества и расположения двигателей (т. е. от компоновки СВВП), что существенным образом влияет на аэродинамические и моментные характеристики СВВП, т. е. определяет его компоновку.
Воздействие газовых струй двигателей вызываетэрозию поверхности аэродрома, степень которой зависит и от типа двигателей, создающих подъемную силу, и от их расположения. Частицы поверхности аэродрома, вымываемые газовыми струями, вместе с высокотемпературными восходящими вверх течениями воздействуют на конструкцию СВВП и, попадая в воздухозаборники двигателей, снижают надежность их работы, ресурс и тяговые характеристики. С целью уменьшения влияния струй на поверхность аэродрома и на самолет часто применяется методика эксплуатации СВВП в режиме укороченного взлета и посадки(УВП), когда дистанции разбега и пробега составляют всего несколько десятков метров. Это позволяет также увеличить весовую отдачу СВВП за счет существенно меньших расходов топлива на режимах взлета и посадки.
Одной из основных проблем, возникающих при разработке СВВП, является обеспечение балансировки, устойчивости и управляемости их на режимах ВВП и переходных режимах, когда поступательная скорость равна нулю либо недостаточно велика для эффективной работы аэродинамических поверхностей, создающих балансирующие и управляющие силы и моменты.
Балансировка, устойчивость и управляемость СВВП на этих режимах обеспечивается либо рассогласованием (модуляцией) тяги двигателей, т.е. увеличением или уменьшением тяги одного двигателя по сравнению с другим, либо с помощью системы струйных рулей, либо комбинацией этих способов.
|
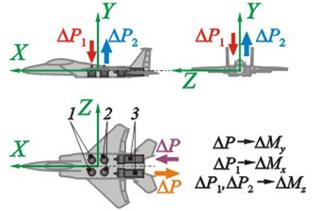
| Рис. 7.72. Управление СВВП рассогласованием тяги двигателей |
Рассогласование ΔP тяги (рис. 7.72) маршевых двигателей 3 приводит к возникновению момента рыскания ΔMy, рассогласование ΔP1 первой группы подъемных двигателей 1 приводит к возникновению момента крена ΔMx. Рассогласование тяги ΔP1 и ΔP2 первой и второй группы подъемных двигателей 2 приводит к возникновению момента тангажа ΔMz.
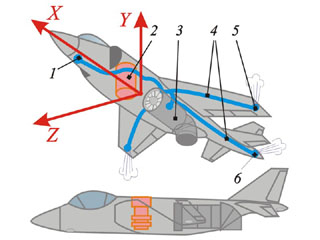
Струйная система управления СВВП (рис. 7.73) включает в себя несколько удаленных от центра масс самолета на максимально возможное расстояние реактивных сопел (1, 5, 6), к которым с помощью трубопроводов 4 подводится сжатый воздух от компрессора подъемно-маршевого двигателя 3. Конструкция сопла 1 позволяет регулировать расход воздуха и, следовательно, тягу. Конструкция сопел 5 и 6 позволяет изменять не только величину, но и направление силы тяги на противоположное (реверсировать тягу сопла).
При сбалансированном по тангажу (относительно оси Z) самолете (сумма моментов сил тяги сопла 1, подъемного 2 и подъемно-маршевого двигателя 3 относительно центра масс равна нулю) увеличение силы тяги сопла 1 вызовет кабрирующий момент, уменьшение - пикирующий.
|
| Рис. 7.73. Управление системой струйных рулей СВВП с комбинированной силовой установкой |
Показанное на рис. 7.73 направление струй из сопел 5 и 6 приводит к кренению самолета на левое крыло и развороту влево.
Управление режимом работы двигателей и струйными рулями для изменения действующих на самолет сил и моментов на режимах ВВП и переходных режимах летчик осуществляет такими же рычагами управления, как и на обычном самолете, т. е. одновременно с созданием управляющих реактивных сил соответствующим образом отклоняются и аэродинамические рулевые поверхности (руль высоты, элероны и руль направления), которые, однако, не создают управляющих сил на малых (доэволютивных) скоростях поступательного движения самолета. С ростом скорости поступательного движения растут и силы на рулевых поверхностях и с помощью автоматики постепенно выключаются из работы системы струйного управления.
Здесь необходимо отметить, что на малых (доэволютивных) скоростях СВВП не обладает собственной устойчивостью, так как малы аэродинамические силы, способные возвратить его в исходное положение при случайных внешних воздействиях. Поэтому устойчивость СВВП на этих режимах (стабилизация его и поддержание состояния балансировки) обеспечивается включенными в систему управления средствами автоматики, которые, реагируя на угловые перемещения самолета при возмущениях, без вмешательства летчика с помощью струйных рулей возвращают самолет в исходное положение балансировки.
Мы перечислили здесь лишь некоторые проблемы формирования облика СВВП, решение которых уже на ранних стадиях проектирования требует взаимодействия проектировщиков различных специализаций.
К настоящему моменту в мире спроектировано, построено и испытано более 50 типов самолетов вертикального (укороченного) взлета и посадки. В большинстве проектов этих самолетов в основу были положены требования военного применения.
Первый отечественный боевой СВВП был создан в ОКБ им. А.С. Яковлева (см. раздел 20.2).
Преимущества СВВП, о которых мы упоминали в начале раздела 7.4, несомненно приведут к созданию СВВП, способных конкурировать с обычными самолетами при перевозках пассажиров и грузов на короткие и средние расстояния.
Гидроавиация
Работы по созданию самолетов, приспособленных для взлета с водной поверхности и посадки на нее, начались практически одновременно с работами по созданию самолетов, базирующихся на земле.
28 марта 1910 года первый полет нагидросамолете(от гидро... (греч. hydor - вода) и самолет) сoбственной конструкции совершил француз А. Фабр.
Исторически сложилось так, что у истоков отечественного воздухоплавания и авиации стояли офицеры военно-морского флота России. Первыми в мире они разработали тактику морской авиации, осуществили с воздуха бомбардировку вражеского корабля, создали проект авианосца, первыми пролетели в небе Арктики.
|
| Рис. 7.74. Схема трехпоплавкового гидросамолета (двухпоплавкового с хвостовым поплавком) |
Географические и стратегические особенности театров военных действий того времени, протяженные морские границы на Балтийском и Черном морях, отсутствие специально оборудованных аэродромов для эксплуатации сухопутных самолетов и в то же время обилие крупных рек, озер, свободных морских пространств обусловили потребность создания морского самолетостроения в нашей стране.
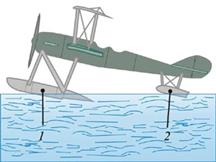
Развитие гидроавиации началось с постановки сухопутного самолета на поплавки. Первые поплавковые гидросамолеты (рис. 7.74) имели два основных поплавка 1 и дополнительный 2 (вспомогательный) поплавок в хвостовой или носовой части.
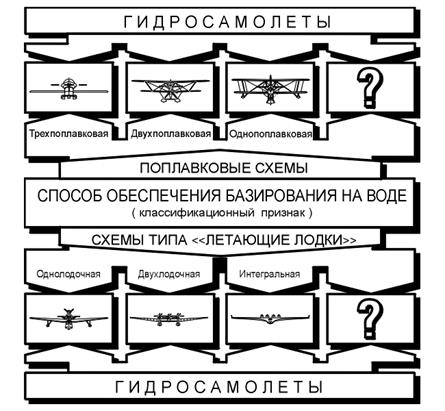
В зависимости от того, каким способом обеспечивается базирование и эксплуатация самолета с поверхности акваторий (от лат. aqua - вода) - гидродромов, можно провести классификацию гидросамолетов (рис. 7.75).
Поплавковые схемы применяются в настоящее время для легких самолетов, хотя уже в 1914 году совершил первый полет четырехмоторный тяжелый самолет "Илья Муромец" (см. рис. 19.1), поставленный на поплавки по трехпоплавковой схеме с хвостовым поплавком, в 1929 году в перелете по маршруту Москва - Нью-Йорк самолета "Страна Советов" (см. рис. 19.7) 7950 км - от Хабаровска до Сиэтла самолет летел над водой, и на этом участке сухопутное шасси заменялось поплавковым по двухпоплавковой схеме.
|
| Рис. 7.75. Классификация гидросамолетов по способу обеспечения базирования на воде |
Рост размеров и масс гидросамолетов и, как следствие, рост размеров поплавков позволил размещать в них экипаж и оборудование, что привело к созданию гидросамолетов типа "летающая лодка" однолодочной схемы и двухлодочнойсхемы - катамаран (от тамильского каттумарам, буквально - связанные бревна).
Интегральная схема наиболее целесообразна для тяжелых многоцелевых океанских гидросамолетов. Частично погруженное в воду крыло позволяет уменьшить размеры лодки и повысить аэрогидродинамическое совершенство гидросамолета.
Самолет-амфибия(от греч. amphibios - ведущий двойной образ жизни) приспособлен для взлета с земли и воды и посадки на них.
Таким образом, технические решения, обеспечивающие базирование и эксплуатацию самолета с водной поверхности, фактически определяют облик (аэродинамическую схему) гидросамолета.
Сложность и количество проблем, которые должны решить проектировщики при создании гидросамолета, существенно возрастают, поскольку помимо высоких аэродинамических и взлетно-посадочных характеристик обычного самолета должны быть обеспечены и заданные ТЗ мореходные качества.
Оценить мореходные качества гидросамолета позволяют методы научной дисциплины "Гидромеханика", изучающей движение и равновесие жидкостей, а также взаимодействие между жидкостями и твердыми телами, полностью или частично погруженными в жидкость.
Мореходные качества (мореходность) гидросамолета характеризуют возможность его эксплуатации в акваториях с определенными гидрометеорологическими условиями - скоростью и направлением ветра, направлением, скоростью движения, формой, высотой и длиной волн воды.
Мореходность гидросамолета оценивается предельным волнением акватории, при котором возможна безопасная эксплуатация.
Аналогично тому, как для оценки летных характеристик самолета (см. раздел 3.2.2) применяется международная стандартная атмосфера (МСА), для характеристики волнения акватории используется определенная шкала (математическая модель), устанавливающая связь между словесной характеристикой волнения, высотой волны и баллом (от 0 до IX) - степенью волнения.
В соответствии с этой шкалой, например, слабое волнение (высота волны до 0,25 м) оценивается баллом I, значительное волнение (высота волны 0,75-1,25 м) оценивается баллом III, сильное волнение (высота волны 2,0-3,5 м) оценивается баллом V, исключительное волнение (высота волны 11 м) оценивается баллом IX.
Мореходные качества (мореходность) гидросамолета включают в себя такие характеристики гидросамолета, как плавучесть, остойчивость, управляемость, непотопляемостьи т. п.
Эти качества определяются формой и размерами находящейся под водой водоизмещающейчасти (лодки или поплавка) гидросамолета, распределением масс гидросамолета по длине и высоте.
В дальнейшем при рассмотрении мореходных характеристик гидросамолета, если их без особой оговорки в равной мере можно отнести к лодке и поплавку, будем использовать термин "лодка". Плавучесть - способность гидросамолета плавать в заданном положении относительно водной поверхности.
Гидросамолет, как и любое другое плавающее тело, например судно, поддерживается на плаву архимедовой силой
Р = Wρвg = G,
| где | W | - | объем воды, вытесняемый лодкой, - объемное водоизмещение лодки, м3; | |
| ρв | - | плотность воды, вытесняемой лодкой, кг/м3; | ||
| Wρв | - | масса воды, вытеснямой лодкой, - массовое водоизмещение лодки, кг; | ||
| g | - | ускорение свободного падения, м/с2; | ||
| G | - | сила тяжести гидросамолета, Н. |
Сила тяжести гидросамолета G приложена в центре масс самолета (ц.м.),сила поддержания (архимедова сила, сила воздействия вытесненной жидкости на лодку гидросамолета) Р приложена в центре масс вытесненного лодкой объема воды, или, по корабельной терминологии (которой широко пользуются проектировщики гидросамолетов), в центре величины(ц.в.).
| |
| Рис. 7.76. Гидросамолет на плаву | |
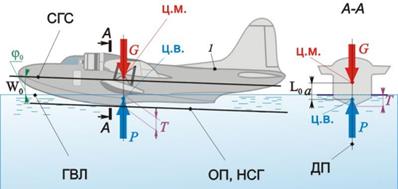
Очевидно, что для обеспечения равновесия самолета на плаву (рис. 7.76) силы G и P должны лежать на прямой, соединяющей ц.м. и ц.в., в вертикальной продольной плоскости симметрии гидросамолета - диаметральной плоскости лодки (ДП). Очевидно также, что основная плоскость лодки (ОП) - горизонтальная плоскость, проходящая через нижнюю точку поверхности лодки перпендикулярно к диаметральной плоскости, и, соответственно, нижняя строительная горизонталь лодки (НСГ), строительная горизонталь самолета (СГС) и палуба 1 - верхняя поверхность лодки в общем случае не параллельны плоскости водной поверхности и линии соприкосновения поверхности воды с корпусом лодки гидросамолета WоLо.
Линия соприкосновения спокойной поверхности воды с корпусом лодки гидросамолета WоLо при полной взлетной массе и выключенных двигателях - грузовая ватерлиния (от голл. water - вода и lijn - линия). Грузовая ватерлиния (ГВЛ) при плавании в пресной воде не совпадает с ГВЛ при плавании в морской воде, поскольку плотность пресной речной или озерной воды ρв=1000 кг/м3, плотность морской воды ρв = 1025 кг/м3.
Соответственно,осадкаТ (расстояние от ГВЛ до самой нижней части лодки, характеризующее погружение лодки ниже уровня воды) при одинаковой взлетной массе гидросамолета в пресной воде будет больше, чем в морской.
Значения осадок носом и кормой определяют посадкулодки гидросамолета относительно поверхности воды - дифферент лодки (от лат. differens (differetis) - разница) - наклон ее в продольной плоскости, который измеряется углом дифферента φ 0 или разностью между осадками кормы и носа. Если разность равна нулю, говорят, что лодка "сидит на ровном киле"; если осадка кормы больше осадки носа - лодка "сидит с дифферентом на корму" (как показано на рис 7.76), если меньше - лодка "сидит с дифферентом на нос".
Остойчивость (аналог термина "устойчивость" в морской терминологии) при плавании - способность гидросамолета, отклоненного внешними возмущающими силами от положения равновесия, возвращаться в исходное положение после прекращения действия возмущающих сил.
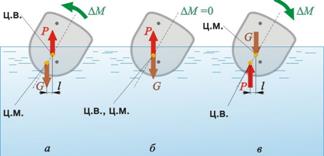
Очевидно, что при плавании частично или вполне (полностью) погруженного в воду тела нет никаких других сил для возвращения его в положение равновесия, кроме силы тяжести G и равной ей силы поддержания Р. Следовательно, только взаимное положение этих сил определит остойчивость или неостойчивость плавающего тела, что иллюстрирует рис. 7.77.
|
| Рис. 7.77. К объяснению остойчивости плавающего тела |
Если центр масс тела расположен ниже центра величины (рис. 7.77,а), при отклонении от положения равновесия возникает стабилизирующий момент ΔМ = Gl, возвращающий тело в исходное положениеостойчивого равновесия.
Если центр масс тела расположен выше центра величины (рис. 7.77,в), при отклонении от положения равновесия возникает дестабилизирующий момент ΔМ = Gl, и тело не может самостоятельно возвратиться в исходное положение неостойчивого равновесия.
Если положение центра масс тела совпадает с положением центра величины (рис. 7.77,б), тело находится в безразличном равновесии.
Следует отметить, что положение центра величины существенным образом зависит от формы погруженной части тела и угла отклонения его от исходного положения равновесия.
Остойчивость гидросамолета(как и остойчивость судна) принято определять взаимным положением центра масс и метацентра - центра кривизны линии, по которой смещается центр величины водоизмещающего тела при выведении его из равновесия.
Метацентр - от греч. meta - между, после, через - составная часть сложных слов, означающих промежуточность, следование за чем-либо, переход к чему-либо другому, перемену состояния, превращение и лат. - centrum средоточие, центр.
Различают поперечную и продольную остойчивость гидросамолета (при наклонении самолета соответственно в поперечной и продольной плоскостях).
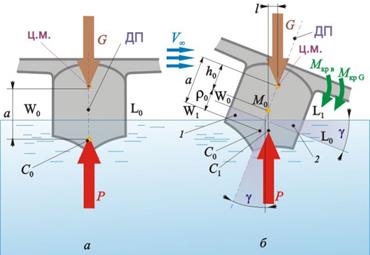
Поперечная остойчивость.Рассмотрим случай поперечного наклонения - отклонение диаметральной плоскости лодки (ДП) от вертикали, например под воздействием порыва ветра.
Гидросамолет (рис. 7.78,а) находится на плаву в состоянии равновесия, сила тяжести G и сила поддержания Р равны, лежат в диаметральной плоскости, размер а определяет возвышение центра масс над центром величины.
|
| Рис. 7.78. Неостойчивая лодка |
От боковой составляющей порыва ветра Vв (рис. 7.78,б) возникнет кренящий момент Мкр в, зависящий от скоростного напора, площади и размаха наветренной (обращенной в ту сторону, откуда дует ветер) консоли крыла, площади боковой проекции гидросамолета. Под действием этого момента самолет накренится на некоторый малый (будем считать - бесконечно малый) угол γ и новое положение лодки определит новую грузовую ватерлинию W1L1, плоскость которой наклонена на угол γ от исходной ватерлинии WоLо.
Форма подводной (водоизмещающей) части лодки изменится: объем, ограниченный в каждом поперечном сечении лодки фигурой 1, выйдет из-под воды, а равный ему объем, ограниченный в каждом поперечном сечении лодки фигурой 2, уйдет под воду. Таким образом, величина поддерживающей силы не изменится (Р = Wρвg = G), однако центр величины сместится из исходного положения Со в точку С1. Точка Мо пересечения двух смежных линий действия архимедовых сил при бесконечно малом угле γ между ними и является начальным метацентром.
Метацентрический радиус ρ0 определяет начальную кривизну линии смещения центра величины лодки при крене.
Мерой поперечной остойчивости гидросамолета является значение метацентрической высоты hо = ρо - а:
- если hо > 0 - лодка остойчива;
- если hо = 0 - равновесие безразличное;
- если hо < 0 - лодка неостойчива.
В рассмотренном примере hо < 0. Нетрудно видеть, что перпендикулярные к поверхности воды и равные силы Р и G будут составлять пару с плечом l, причем момент этой пары Мкр G = Gl совпадает по направлению с возмущающим моментом Мкр в и увеличивает угол крена. Таким образом, гидросамолет, показанный на рис. 7.78,б, при действии внешних возмущений не возвращается к исходному положению, т. е. не обладает поперечной остойчивостью.
Очевидно, что для обеспечения поперечной остойчивости центр масс должен находиться ниже самого низкого положения метацентра.
Большинство современных гидросамолетов выполнено по классической аэродинамической схеме с фюзеляжем - лодкой, которой придаются соответствующие формы для выполнения взлета с воды и посадки на воду, высокорасположенным крылом с установленными на нем или на лодке двигателями для максимального удаления их от водной поверхности с целью исключить при движении по воде заливание крыла водой и попадание ее в двигатели и на винты самолетов с винтомоторной силовой установкой, поэтому в большинстве случаев центр масс самолета выше метацентра (как на рис. 7.78,б) и однолодочный гидросамолет в поперечном отношении неостойчив.
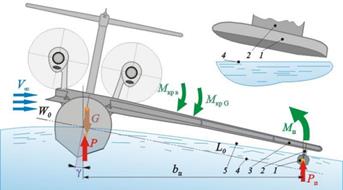
Проблемы поперечной остойчивости гидросамолета однопоплавковой или однолодочной схемы могут быть решены применением подкрыльных поплавков (рис. 7.79).
|
| Рис. 7.79. Подкрыльный поплавок |
Подкрыльный поплавок 1 устанавливают на пилоне 2 по возможности ближе к концу крыла 3.Опорные (поддерживающие) подкрыльные поплавки не касаются воды при движении гидросамолета на ровной воде 4 и обеспечивают остойчивое положение гидросамолета с углами крена 2-3° при стоянке,несущиеподкрыльные поплавки частично погружены в воду и обеспечивают стоянку без крена.
Водоизмещение поплавка выбирается таким образом, чтобы под воздействием ветра с определенной скоростью V в гидросамолет, находящийся на скате волны 5, соответствующей предельному волнению акватории, заданному в ТЗ на проектирование, накренился на определенный угол γ. В этом случае восстанавливающий момент поплавка, определяемый поддерживающей силой поплавка Рп и расстояниемbп от диаметральной плоскости поплавка до диаметральной плоскости лодки, Мп = Рпbп, должен парировать (уравновесить) кренящие моменты Мкр в от ветра и Мкр G от неостойчивой лодки.
|
| Рис. 7.80. К объяснению продольной остойчивочти |
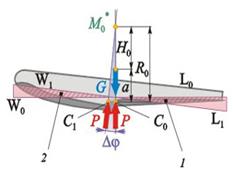
Продольная остойчивость определяется такими же условиями, как и поперечная. Если под действием какого-либо внешнего возмущения гидросамолет (рис. 7.80) получит продольное наклонение от исходного положения, определяемого ватерлинией W оLо, например увеличение на угол Δφ дифферента на нос, это определит новую грузовую ватерлинию W1L1.
Объем лодки 1 выйдет из-под воды, а равный ему объем 2 уйдет под воду, при этом значение поддерживающей силы не изменится (Р = Wρвg = G), однако центр величины сместится из исходного положения С0 в точку С1. Точка Мо* пересечения двух смежных линий действия поддерживающих сил при бесконечно малом угле Δφ между ними определит положение начального продольного метацентра.
Мера продольной остойчивости гидросамолета - продольная метацентрическая высота Hо = Rо - а.
Обеспечить продольную остойчивости гидросамолета проще, чем поперечную, в том смысле, что сильно развитая в длину лодка почти всегда обладает естественной продольной остойчивостью (Hо > 0).
Отметим, что пикирующий момент от силы тяги двигателя, линия действия которой обычно проходит выше центра масс самолета, заглубляет носовую часть лодки, уменьшает угол начального дифферента, т. е. заставляет лодку принять некоторый дифферент на нос, что определит новую грузовую ватерлинию, которая называется "упорной".
Гидростатические силы (силы поддержания), обеспечивающие плавучесть и остойчивость лодки в состоянии покоя, естественно, в большей или меньшей мере проявляются и в процессе движения по воде.
Весьма важной характеристикой гидросамолета, определяющей его мореходность, является способность преодолевать сопротивление воды и развивать необходимую скорость движения по воде при минимальных затратах мощности.
Гидродинамическая сила сопротивления воды движению лодки в режиме плавания определяется трением воды в пограничном слое (сопротивление трения) и распределением гидродинамического давления потока воды на лодку (сопротивление формы, связанное с образованием вихревых течений - его иногда называют водоворотным сопротивлением) и зависит от скорости движения (скоростного напора ρвV2/2), формы и состояния поверхности лодки.
Здесь уместно напомнить, что плотность воды ρв больше плотности воздуха на уровне моря примерно в 800 раз !
К этому сопротивлению добавляется волновое сопротивление, которое, в отличие от волнового сопротивления, связанного с необратимыми потерями энергии в скачке уплотнения при полете с закритическими скоростями (см. раздел 5.5), возникает при движении тела вблизи свободной поверхности жидкости (поверхности раздела воды и воздуха).
Волновое сопротивление- часть гидродинамического сопротивления, характеризующая затрату энергии на образование волн.
Волновое сопротивление в воде (тяжелой жидкости) возникает при движении погруженного или полупогруженного тела (поплавка, лодки) вблизи свободной поверхности жидкости (т. е. границы воды и воздуха). Движущееся тело оказывает добавочное давление на свободную поверхность жидкости, которая под влиянием собственной силы тяжести будет стремиться вернуться к исходному положению и придет в колебательное (волновое) движение. Носовая и кормовая части лодки образуют взаимодействующие между собой системы волн, оказывающие существенное влияние на сопротивление.
В режиме плавания равнодействующая сил гидродинамического сопротивления практически горизонтальна.
Форма водоизмещающей части гидросамолета (как и форма судна) должна обеспечить способность движения по воде с минимальным сопротивлением и, как следствие, с минимальными затратами мощности (ходкость судна, по морской терминологии).
При проектировании гидросамолетов (как и судов) для выбора форм и оценки гидродинамических характеристик используются результаты испытаний путем буксировки ("протаски") динамически подобных моделей в опытовых бассейнах (гидроканалах) или в открытых акваториях.
Однако, в отличие от судна, комплекс характеристик мореходности гидросамолета значительно шире, основной из них является способность производить безопасные взлеты и посадки на взволнованной поверхности с определенной высотой волны, при этом скорости хода по воде гидросамолетов во много раз превышают скорости морских судов.
Благодаря особой форме днища лодки гидросамолета возникают гидродинамические силы, поднимающие носовую часть и вызывающие общее значительное всплытие лодки.
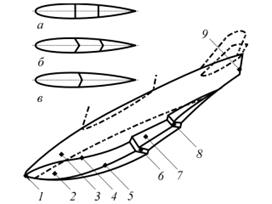
Следовательно, движение гидросамолета, в отличие от судна, происходит при переменном водоизмещении и угле дифферента лодки (фактически угле набегания водяного потока на днище, аналогичном углу атаки крыла). На скоростях движения по воде, близких к скорости отрыва при взлете, водоизмещение практически равно нулю - гидросамолет идет в режиме глиссирования (от франц. glisser - скользить) - скольжения по поверхности воды. Характерная особенность режима глиссированиязаключается в том, что равнодействующая сил гидродинамического сопротивления воды имеет настолько большую вертикальную составляющую (гидродинамическую силу поддержания), что лодка большей частью своего водоизмещающего объема выходит из воды и скользит по ее поверхности. Поэтому обводы (очертания наружной поверхности) лодки гидросамолета (рис. 7.81) существенно отличаются от обводов судна.
|
| Рис. 7.81. Лодка гидросамолета: 1 - нос лодки; 2 - днище; 3 - борт; 4 - скула; 5 - киль; 6 - первый редан; 7 - межреданная часть днища; 8 - второй редан; 9 - корма |
Основное отличие состоит в том, что днище (нижняя поверхность лодки, которая является основной опорной поверхностью при движении гидросамолета по воде) имеет один или несколькореданов(франц. redan - уступ), первый из которых, как правило, располагается вблизи центра масс гидросамолета, а второй в кормовой части. Прямые в плане реданы (рис. 7.81,а) создают в полете значительно большее сопротивление, чем заостренные (стреловидные, оживальные) реданы (рис. 7.81,б), гидродинамическое сопротивление и брызгообразование которых существенно меньше. Со временем ширина второго редана постепенно уменьшалась, межреданная часть днища стала сходиться в одной точке (рис. 7.81,в) на корме лодки.
|
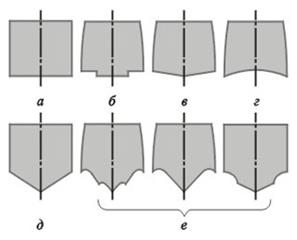
| Рис. 7.82. Форма поперечного сечения лодки |
В процессе развития гидроавиации изменялась и форма поперечного сечения лодки (рис. 7.82). Лодки с плоским днищем (рис. 7.82,а) и с продольными реданами (рис. 7.82,б), слабокилеватые (т. е. с небольшим наклоном участков днища от центральной килевой линии к бортам - рис. 7.82,в) и с вогнутым днищем (рис. 7.82,г) постепенно уступали место килеватым лодкамс плоскокилеватым днищем (рис. 7.82,д) или с более сложным (в частности, криволинейным) профилем килеватости (рис. 7.82,е).
Здесь следует отметить, что гидросамолеты не имеют амортизаторов (см. раздел 7.3), способных поглощать и рассеивать энергию ударов при посадке на воду. Поскольку вода - практически несжимаемая жидкость, то сила удара о воду соизмерима с силой удара о землю. Основное назначениекилеватости- заменить собой амортизатор и при
постепенном погружении в воду клиновой (килеватой) поверхности при посадке смягчить посадочный удар, а также удары воды о днище лодки при движении на взволнованной поверхности воды.
Характерные обводы лодки современного гидросамолета представлены на рис. 7.83. Лодка имеет поперечную и продольную килеватость днища.
Поперечная килеватостьлодки (или угол, образуемый килем и скулами) выбирается исходя из условий обеспечения приемлемых перегрузок на взлетно-посадочных режимах и обеспечения динамической путевой остойчивости.
Угол поперечной килеватости носовой части лодки начиная от первого редана βр н плавно увеличивается к носу лодки (на виде спереди А-А - наложенные сечения по носовой части лодки) таким образом, что формируется волнорез в носовой частим лодки, "разваливающий" встречную волну и уменьшающий волно- и брызгообразование.
Скула (линия пересечения днища и борта лодки) препятствует прилипанию воды к бортам. Для создания приемлемого волно- и брызгообразования применяют выгиб носовых скул, т. е. профилировку днища носовой части лодки по сложным криволинейным поверхностям.
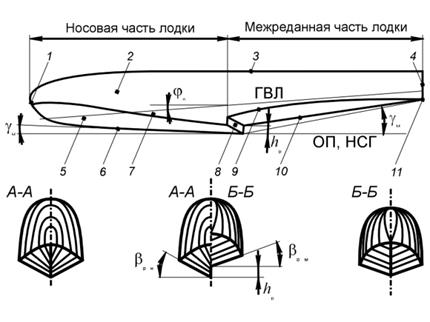
|
| Рис. 7.83. Характерные обводы лодки гидросамолетов: 1 - нос лодки; 2 - борт; 3 - палуба; 4 - корма; 5 - днище носовой части; 6 - киль;7 - скула носовой части; 8 - первый редан; 9 - скула зареданной части; 10 - межреданная часть днища; 11 - второй редан |
Днище межреданной части лодки (на виде сзади Б-Б - наложенные сечения по кормовой части лодки) обычно плоскокилеватое - значение угла βр м постоянно. Углы поперечной килеватости на редане обычно порядка 15-30°.
Продольная килеватость лодки γл = γн + γ м определяется углом продольной килеватости носовой части γн и углом продольной килеватости межреданной части γм.
Длина, форма и продольная килеватость носовой части (γн @ 0¸3°), влияющие на продольную остойчивость и угол начального дифферента, выбираются такими, чтобы исключить зарывание носом и заливание палубы водой при высоких скоростях хода.
Продольная килеватость межреданной части (γм @ 6¸9°) выбирается так, чтобы обеспечить устойчивое глиссирование, посадку на сушу при максимально допустимом угле атаки и сход на воду (для самолета-амфибии) по существующимслипам(англ. slip, букв. - скольжение) - уходящим в воду наклонным береговым площадкам для схода амфибии на воду и выхода на берег.
При достаточной продольной килеватости межреданной части отрыв при взлете с воды может происходить "с подрывом" (увеличением угла атаки) на максимально допустимом коэффициенте подъемной силы.
Отрыв с воды при взлете осложнен тем, что кроме сил сопротивления воды движению лодки, рассмотренных выше, между днищем лодки и водой действуют силы сцепления (подсасывания), особенно в задней части лодки.
Назначение редана - уничтожить подсасывающее действие воды (подсос) при разбеге, уменьшить этим сопротивление воды, дать возможность лодк
Дата добавления: 2019-02-08; просмотров: 1158;
Поиск по сайту
Узнать еще
- Величины для различных случаев посадки судна
- Глубина посадки картофеля
- Допуски и посадки резьб с зазором
- ДОПУСКИ И ПОСАДКИ ШЛИЦЕВЫХ СОЕДИНЕНИЙ.
- Допуски и посадки шпоночных соединений
- ДОПУСКИ, ПОСАДКИ И ИЗМЕРЕНИЯ
- Изменение вертикального размера Панели задач
- Изменение посадки и остойчивости при перемещении груза

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
